自动驾驶的轨迹规划方法、装置、电子设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种自动驾驶的轨迹规划方法、装置、电子设备及计算机可读存储介质。
背景技术:
1、随着自动驾驶技术的不断发展及普及,用户对于自动驾驶技术的安全性及舒适性要求不断提升,自动驾驶技术需求方对于该技术的研发成本、算力成本、场景覆盖率、稳定性等性能指标要求也愈来愈高。对于自动驾驶技术中的规划模块,需要适配精度较低的传感器,而对于场景中的危险任务及时做出安全且舒适的行为。
2、相关规划技术架构都分为横向及纵向两个部分,横向部分会基于地图、定位、感知、导航等数据去生成安全且合理的路径信息,而纵向部分更重视感知、融合、预测、地图、用户行为等交互信息强的信息,在横向生成的路径上去计算舒适且安全的速度信息。而由于纵向部分的交互信息的实时和多变,具有强博弈性的,会存在较多噪声和误识别情况,这对于基于这些交互信息生成的路径去规划轨迹的连续性和稳定性,会产生严重的负面影响。
3、在纵向规划技术中,基于强化学习的方法是通过对于环境状态进行建模,自车通过置信度判断去对世界进行观测,并基于当前自车状态、可以产生的行为、未来可能获得的增益等信息去建立一套完整的奖惩机制,使自车在可观测或部分可观测的状态下做出最优解判断。而该强化学习方法聚焦于输出决策信息、如变道、加减速等标志,较难直接输出平顺性良好的轨迹。该类方法赋予行为及动作明确的语义信息,并能够综合评估一段时间内的最优解,具有完善的博弈判断。但是,这类方法对于噪声较大的环境,或处理精度较低的感知信息时,容易过拟合至错误解,导致输出异常。同时,这类方法也需要大量的数据及标注平台的支持,难以符合目前算力较低平台的使用要求。
4、所以,基于现有算力平台较低,噪声较大、环境较为复杂的交互信息生成的路径,如何为自动驾驶生规划出一条舒适性高,安全性强的轨迹,是目前有待解决的技术问题。
技术实现思路
1、本发明提供一种自动驾驶的轨迹规划方法、装置、电子设备及计算机可读轨迹存储介质,以至少解决相关技术中由于现有算力平台较低,噪声大、环境复杂且实时多变的交互信息生成的路径去规划自动驾驶的速度轨迹,导致自动驾驶的舒适性低,安全行弱,可靠性低的技术问题。本发明的技术方案如下:
2、根据本发明实施例的第一方面,提供一种自动驾驶的轨迹规划方法,包括:
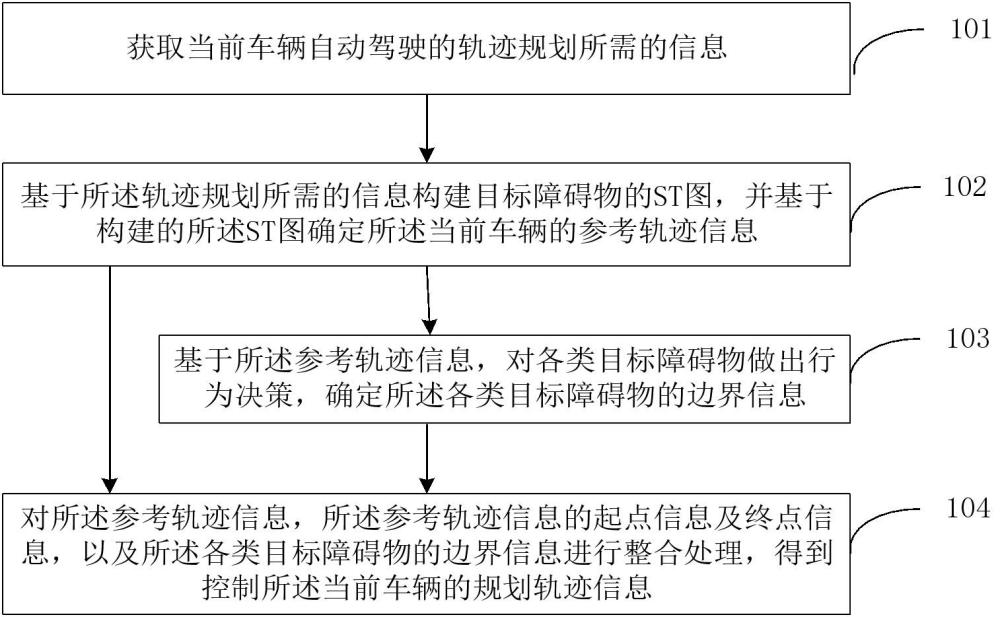
3、获取当前车辆自动驾驶的轨迹规划所需的信息;
4、基于所述轨迹规划所需的信息构建目标障碍物的st图,并基于构建的所述st图确定所述当前车辆的参考轨迹信息;
5、基于所述参考轨迹信息,对各类目标障碍物做出行为决策,确定所述各类目标障碍物的边界信息;
6、对所述参考轨迹信息,所述参考轨迹信息的起点信息及终点信息,以及所述各类目标障碍物的边界信息进行整合,得到控制所述当前车辆的规划轨迹信息。
7、可选的,所述轨迹规划所需的信息包括:地图信息、参考线信息、路径信息、变道信息、预测信息、所述感知信息、用户交互信息、车辆运动状态信息和横向决策行为信息;
8、所述基于所述轨迹规划所需的信息构建目标障碍物的st图,并基于构建的所述st图确定所述当前车辆的参考轨迹信息,包括:
9、基于所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,将所述当前车辆与所有目标障碍物的交互点的坐标投影到统一坐标系中,构建目标障碍物的st图;
10、对所述st图中的目标障碍物进行筛选处理,以及对所述用户交互信息及所述横向决策行为信息进行信息整合及仲裁处理,得到初步纵向决策结果;
11、基于所述初步纵向决策结果确定所述当前车辆的参考轨迹信息。
12、可选的,所述基于所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,将所述当前车辆与所有目标障碍物的交互点的坐标投影到统一坐标系中,构建目标障碍物的st图,包括:
13、对所述自动驾驶速度规划所需的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息进行预处理;
14、基于预处理后的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,确定所述当前车辆与所有目标障碍物的在未来轨迹上的交互点,并将所述交互点按照路程与时间的坐标投影到统一坐标系中,构建目标障碍物的st图。
15、可选的,所述对所述自动驾驶速度规划所需的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息进行预处理,包括:
16、对所述自动驾驶速度规划所需的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息进行整合;
17、将整合后的信息按照场景划分为:弱势场景、多个方向障碍物的高风险场景和环境信息缺失的危险场景;
18、对所述弱势场景、所述多个方向障碍物的高风险场景和所述环境信息缺失的危险场景中的低可用性信息分别进行过滤,得到对应的每个场景中障碍物的有效信息;
19、融合所述每个场景中障碍物的有效信息,得到所述路径信息中的障碍物的有效信息。
20、可选的,所述对所述弱势场景、所述多个方向障碍物的高风险场景和所述环境信息缺失的危险场景中的低可用性信息分别进行过滤,得到对应的每个场景中障碍物的有效信息,包括:
21、对于所述弱势场景,将所述弱势场景中的障碍物信息与历史数据进行比对,过滤掉低可用性信息;以及对非弱势场景中的障碍物信息直接滤掉掉低可用性信息,得到所述弱势场景中障碍物的有效信息;
22、对于所述多个方向的高风险场景,根据所述高风险场景中当前车辆的运动需求及路权进行判断,过滤掉高路权道路巡航中所述当前车辆的左右车道的障碍物信息,以及前向感知范围外的障碍信息,后向安全距离外的障碍物信息;以及,所述当前车辆从低路权的道路向高路权的道路运动过程中,过滤掉所述当前车辆的反向车道内的障碍物信息,且保留目标车道及其相邻车道内的障碍物信息,得到所述高风险场景中障碍物的有效信息;
23、对于所述环境信息缺失的危险场景,基于地图外或感知域外的障碍物,在当前车辆与所述障碍物的相对位置及姿态存在交互风险时,除去存在交互风险的所述障碍物的信息,得到所述危险场景中障碍物的有效信息;以及基于感知盲区内的障碍物,通过所述感知盲区内的障碍物与当前车辆的相对位置、速度及姿态进行筛选,得到所述危险场景中障碍物的有效信息。
24、可选的,所述基于预处理后的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,确定所述当前车辆与所有目标障碍物的在未来轨迹上的交互点,并将所述交互点按照路程与时间的坐标投影到统一坐标系中,构建目标障碍物的st图,包括:
25、基于预处理后的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,通过最近邻查找算法kdtree判断所有目标障碍物在未来轨迹上的位置与所述当前车辆的路径点是否存在的交互点;
26、按照所述目标障碍物在未来轨迹上的交互点到路径点进行最近距离判断;
27、从距离判断结果中的最近点向前递推一个车长的位置开始核查check是否存在碰撞;
28、对存在碰撞的结果通过相邻点进行二次碰撞检测,得到预测轨迹点;
29、将所述预测轨迹点按照近密远疏的规则进行重采样,并按照路程与时间的坐标统一投影到统一坐标系中,完成目标障碍物的st图。
30、可选的,所述对所述st图中的目标障碍物进行筛选处理,以及对所述用户交互信息及所述横向决策行为信息进行信息整合及仲裁处理,得到初步纵向决策结果,包括:
31、通过对未来时间内所述st图中的各类目标障碍物与所述当前车辆的用户交互信息,确定对于所述当前车辆行为没有影响的无效车辆,并对所述无效车辆进行过滤处理;
32、按照障碍物决策对过滤处理后的各类目标障碍物进行障碍物决策判断;以及基于所述用户交互信息进行交互信息判断,以及基于所述横向决策行为信息进行智能变道判断,基于对障碍物决策判断结果,交互信息判断结果和智能变道判断结果进行处理,得到期望时距预决策结果;
33、基于对所述预测信息的告警判断结果,所述障碍物决策判断结果,所述交互信息判断结果,以及所述智能变道判断结果进行处理,得到期望速度预决策结果;
34、对所述期望时距预决策结果和所述期望速度预决策结果进行信息整合及仲裁处理,得到初步纵向决策结果。
35、可选的,所述通过对未来时间内所述st图中的各类目标障碍物与所述当前车辆的用户交互信息,确定对所述当前车辆行为没有影响的无效车辆,并对所述无效车辆进行过滤处理,包括:
36、确定未来时间内所述st图中的各类目标障碍物的目标筛选基准条件;
37、对通过所述未来时间内所述st图中的各类目标障碍物按照所述目标筛选基准条件进行过滤筛选,得到对所述当前车辆行为没有影响的无效车辆;
38、将筛选后得到所述无效车辆按照纵向位置从近到远放入优先队列中;
39、对所述优先队列中的无效车辆执行前前车过滤,得到对所述当前车辆行为没有影响的无效车辆,其中,所述前前车过滤依次包括:交互性筛选、安全性筛选、有效性筛选、碰撞风险筛选和数据可靠性筛选;
40、对所述无效车辆进行过滤处理。
41、可选的,所述基于所述参考轨迹信息,对各类目标障碍物做出行为决策,确定所述各类目标障碍物的边界信息,包括:
42、基于所述参考轨迹信息,对各类目标障碍物中的动静态障碍物及虚拟障碍物做出行为决策,确定所述当前车辆的行驶情况;
43、基于所述当前车辆的行驶情况,对st图进行细化处理,得到各类目标障碍物的边界信息。
44、可选的,在基于所述参考轨迹信息,对各类目标障碍物做出行为决策,确定所述各类目标障碍物的边界信息之后,所述方法还包括:
45、对所述参考轨迹信息进行平滑处理,并评估当前场景的危险程度;
46、基于所述当前场景的危险程度,对平滑处理后的所述参考轨迹信息上的每个点的位置,速度,加速度和加加速度分别进行合理性及体感检测,如果所述参考轨迹信息不满足所述当前场景的危险程度的限制,则对所述参考轨迹信息进行优化及修正处理,得到处理后的参考轨迹信息。
47、可选的,所述对所述参考轨迹信息进行优化及修正处理,得到处理后的参考轨迹信息,包括:
48、确定所述参考轨迹信息中的障碍物信息并构建列表;
49、根据所述障碍物信息和所述构建列表确定加速度边界;
50、根据所述加速度边界,更新参考速度及速度边界,以及更新参考位置及位置边界,得到更新后的参考轨迹信息。
51、根据本发明实施例的第二方面,提供一种自动驾驶的轨迹规划装置,包括:
52、获取模块,用于获取当前车辆自动驾驶的轨迹规划所需的信息;
53、第一确定模块,用于基于所述轨迹规划所需的信息构建目标障碍物的st图,并基于构建的所述st图确定所述当前车辆的参考轨迹信息;
54、第二确定模块,用于基于所述参考轨迹信息,对各类目标障碍物做出行为决策,确定所述各类目标障碍物的边界信息;
55、轨迹规划处理模块,用于对所述参考轨迹信息,所述参考轨迹信息的起点信息及终点信息,以及所述各类所述目标障碍物的边界信息进行整合处理,得到控制所述当前车辆的规划轨迹信息。
56、可选的,所述轨迹规划所需的信息包括:地图信息、参考线信息、路径信息、变道信息、预测信息、所述感知信息、用户交互信息、车辆运动状态信息,横向决策行为信息;
57、所述第一确定模块包括:
58、构建模块,用于基于所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,将所述当前车辆与所有目标障碍物的交互点的坐标投影到统一坐标系中,构建目标障碍物的st图;
59、纵向决策处理模块,用于对所述st图中的目标障碍物进行筛选处理,以及对所述用户交互信息及所述横向决策行为信息进行信息整合及仲裁处理,得到初步纵向决策结果;
60、参考轨迹确定模块,用于基于所述初步纵向决策结果确定所述当前车辆的参考轨迹信息。
61、可选的,所述构建模块包括:
62、预处理模块,用于对所述自动驾驶速度规划所需的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信进行预处理;
63、st图构建模块,用于基于预处理后的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,确定所述当前车辆与所有目标障碍物的在未来轨迹上的交互点,并将所述交互点按照路程与时间的坐标投影到统一坐标系中,构建目标障碍物的st图。
64、可选的,所述预处理模块包括:
65、整合模块,用于对所述自动驾驶速度规划所需的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信进行整合;
66、划分模块,用于将整合后的信息按照场景划分为:弱势场景、多个方向障碍物的高风险场景和环境信息缺失的危险场景;
67、过滤模块,用于对所述弱势场景、所述多个方向障碍物的高风险场景和所述环境信息缺失的危险场景中的低可用性信息分别进行过滤,得到对应的每个场景中障碍物的有效信息;
68、融合模块,用于融合所述每个场景中障碍物的有效信息,得到所述路径信息中的障碍物的有效信息。
69、可选的,所述过滤模块包括:
70、第一信息过滤模块,用于对于所述弱势场景,将所述弱势场景中的障碍物信息与历史数据进行比对,过滤掉低可用性信息;以及对非弱势场景中的障碍物信息直接滤掉掉低可用性信息,得到所述弱势场景中障碍物的有效信息;和/或
71、第二信息过滤模块,对于所述多个方向的高风险场景,根据所述高风险场景中当前车辆的运动需求及路权进行判断,过滤掉高路权道路巡航中所述当前车辆的左右车道的障碍物信息,以及前向感知范围外的障碍信息,后向安全距离外的障碍物信息;以及,所述当前车辆从低路权的道路向高路权的道路运动过程中,过滤掉所述当前车辆的反向车道内的障碍物信息,且保留目标车道及其相邻车道内的障碍物信息,得到所述高风险场景中障碍物的有效信息;和/或
72、第三信息过滤模块,用于对于所述环境信息缺失的危险场景,基于地图外或感知域外的障碍物,在当前车辆与所述障碍物的相对位置及姿态存在交互风险时,除去存在交互风险的所述障碍物的信息,得到所述危险场景中障碍物的有效信息;以及基于感知盲区内的障碍物,通过所述感知盲区内的障碍物与当前车辆的相对位置、速度及姿态进行筛选,得到所述危险场景中障碍物的有效信息。
73、可选的,所述st图构建模块包括:
74、交互点确定模块,用于基于预处理后的所述车辆运动状态信息、所述变道信息、所述路径信息、所述地图信息、所述参考线信息、所述感知信息和所述预测信息,通过最近邻查找算法kdtree判断所有目标障碍物在未来轨迹上的位置与所述当前车辆的路径点是否存在的交互点;
75、判断模块,用于按照所述目标障碍物在未来轨迹上的交互点到路径点进行最近距离判断;
76、碰撞核查模块,用于从所述判断模块判断的距离判断结果中的最近点向前递推一个车长的位置开始核查check是否存在碰撞;
77、轨迹点检测模块,用于对存在碰撞的结果通过相邻点进行二次碰撞检测,得到预测轨迹点;
78、障碍物st图确定模块,用于将所述预测轨迹点按照近密远疏的规则进行重采样,并按照路程与时间的坐标统一投影到统一坐标系中,完成目标障碍物的st图。
79、可选的,所述纵向决策处理模块包括:
80、无效车辆确定模块,用于通过对未来时间内所述st图中的各类目标障碍物与所述当前车辆的用户交互信息,确定对于所述当前车辆行为没有影响的无效车辆,并对所述无效车辆进行过滤处理;
81、综合判断模块,用于按照障碍物决策对过滤处理后的各类目标障碍物进行障碍物决策判断;以及基于所述用户交互信息进行交互信息判断,以及基于所述横向决策行为信息进行智能变道判断,基于对障碍物决策判断结果,交互信息判断结果和智能变道判断结果进行处理,得到期望时距预决策结果;
82、速度预决策模块,用于基于对所述预测信息的告警判断结果,所述障碍物决策判断结果,所述交互信息判断结果,以及所述智能变道判断结果进行处理,得到期望速度预决策结果;
83、初步纵向决策处理模块,用于对所述期望时距预决策结果和所述期望速度预决策结果进行信息整合及仲裁处理,得到初步纵向决策结果。
84、可选的,所述无效车辆确定模块包括:
85、基准条件确定模块,用于确定未来时间内所述st图中的各类目标障碍物的目标筛选基准条件;
86、筛选模块,用于对通过所述未来时间内所述st图中的各类目标障碍物按照所述目标筛选基准条件进行过滤筛选,得到对所述当前车辆行为没有影响的无效车辆;
87、队列插入模块,用于将筛选后得到所述无效车辆按照纵向位置从近到远放入优先队列中;
88、车辆过滤模块,用于对所述优先队列中的无效车辆执行前前车过滤,得到对所述当前车辆行为没有影响的无效车辆,其中,所述前前车过滤依次包括:交互性筛选、安全性筛选、有效性筛选、碰撞风险筛选和数据可靠性筛选;
89、无效车辆过滤模块,用于对所述无效车辆进行过滤处理。
90、可选的,所述第二确定模块包括:
91、车辆行驶模块,用于基于所述参考轨迹信息,对各类目标障碍物中的动静态障碍物及虚拟障碍物做出行为决策,确定所述当前车辆的行驶情况;
92、细化处理模块,用于基于所述当前车辆的行驶情况,对所述st图进行细化处理,得到各类目标障碍物的边界信息。
93、可选的,所述装置还包括:
94、平滑处理模块,用于在所述第二确定模块基于所述参考轨迹信息,对各类目标障碍物做出行为决策,确定所述各类目标障碍物的边界信息之后,对所述参考轨迹信息进行平滑处理,并评估当前场景的危险程度;
95、检测模块,用于基于所述当前场景的危险程度,对平滑处理后的所述参考轨迹信息上的每个点的位置,速度,加速度,以及加加速度分别进行合理性及体感检测;
96、优化修正处理,用于在所述检测模块检测到所述参考轨迹信息不满足所述当前场景的危险程度的限制时,对所述参考轨迹信息进行优化及修正处理,得到处理后的参考轨迹信息。
97、可选的,所述优化修正处理包括:
98、障碍物确定模块,用于确定所述参考轨迹信息中的障碍物信息并构建列表;
99、加速度边界确定模块,用于根据所述障碍物信息和所述构建列表确定加速度边界;
100、更新模块,用于根据所述加速度边界,更新参考速度及速度边界,以及更新参考位置及位置边界,得到更新后的参考轨迹信息。
101、可选的,本发明实施例还提供一种电子设备,包括:
102、处理器;
103、用于存储所述处理器可执行指令的存储器;
104、其中,所述处理器被配置为执行所述指令,以实现如上所述的自动驾驶的轨迹规划方法。
105、可选的,本发明实施例还提供一种计算机可读存储介质,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行如上所述的自动驾驶的轨迹规划方法。
106、可选的,本发明实施例还提供一种计算机程序产品,包括计算机程序或指令,所述计算机程序或指令被电子设备的处理器执行时实现如上所述的自动驾驶的轨迹规划方法。
107、本发明的实施例提供的技术方案至少带来以下有益效果:
108、本发明实施例中,获取当前车辆自动驾驶的轨迹规划所需的信息;基于所述轨迹规划所需的信息构建目标障碍物的st图,并基于构建的所述st图确定所述当前车辆的参考轨迹信息;基于所述参考轨迹信息,对各类目标障碍物做出行为决策,确定所述各类目标障碍物的边界信息;对所述参考轨迹信息,所述参考轨迹信息的起点信息及终点信息,以及所述各类目标障碍物的边界信息进行整合,得到控制所述当前车辆的规划轨迹信息。也就是说,本发明实施例中,基于当前车辆自动驾驶的轨迹规划所需的信息,对纵向部分进行设计,从而得到当前车辆的规划轨迹信息,解决了在算力较低的平台,在噪声较大、环境复杂的场景中,为当前车辆生成一条舒适性高,安全性强的轨迹,提高了自动驾驶的舒适性和安全行。
109、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!