磁浮列车及永磁悬浮系统与控制方法与流程
本发明属于永磁悬浮,尤其涉及一种磁浮列车及永磁悬浮系统与控制方法。
背景技术:
1、永磁悬浮是一种悬浮能力强、能耗低、无电磁辐射、可实现零功率悬浮的磁悬浮制式。如图1所示,安装在轨道梁或路基上的永磁轨道和安装在车辆上的车载永磁模块构成了最基本的永磁悬浮系统,永磁轨道与车载永磁模块的磁极相对,可产生极大的斥力,且无需消耗电能;同时,为了提高斥力,车载永磁模块和永磁轨道通常采用可以将磁能聚集在一侧的halbach阵列,图1所示即为halbach阵列的永磁体模块和永磁轨道。
2、尽管永磁悬浮具有诸多优点,但通过恩绍定理可推导出,永磁悬浮系统无法仅依靠永磁体的静磁力实现稳定的悬浮,除非施加控制或者约束。实践中发现,永磁悬浮系统虽然能够产生很大的垂向力,实现悬浮,但稍偏移轨道的对称中心,就会产生横向力,且横向力与偏移方向同向,偏移越大,横向力越大,如图2所示。这意味着永磁悬浮系统在横向上具有负刚度,无法在横向上保持稳定,是一个不稳定的系统,容易受到外界干扰,难以实现稳定的悬浮。
3、综上所述,永磁悬浮系统的问题在于横向不稳定,无法实现完全的稳定悬浮。因此,现有的永磁悬浮系统通过增加机械导向机构或电磁导向机构来解决横向稳定性问题。然而机械导向机构因与轨道接触会带来摩擦阻力和噪音;而电磁导向机构因引入电磁线圈需要持续向电磁铁通电,消耗电能,并产生电磁辐射;这两种方案均使得永磁悬浮的优点不再突出。
技术实现思路
1、本发明的目的在于提供一种磁浮列车及永磁悬浮系统与控制方法,以解决现有纯永磁悬浮系统仅凭永磁体之间的磁力无法稳定悬浮的问题。
2、本发明是通过如下的技术方案来解决上述技术问题的:一种永磁悬浮系统,所述系统包括:
3、框架基础;
4、设于所述框架基础上的直线驱动机构;
5、设于所述直线驱动机构上的车载永磁模块,所述车载永磁模块与永磁轨道的磁极相对;
6、用于采集所述车载永磁模块与永磁轨道之间的横向位移的第一位移传感器;
7、用于采集转向架相对于轨道中心的横向位移的第二位移传感器;
8、分别与所述直线驱动机构、第一位移传感器和第二位移传感器连接的控制模块,所述控制模块用于根据第一位移传感器采集的横向位移或者第一位移传感器和第二位移传感器采集的横向位移控制直线驱动机构动作,以消除车载永磁模块受到的横向力或者使转向架回到轨道中心。
9、进一步地,所述车载永磁模块采用halbach阵列。
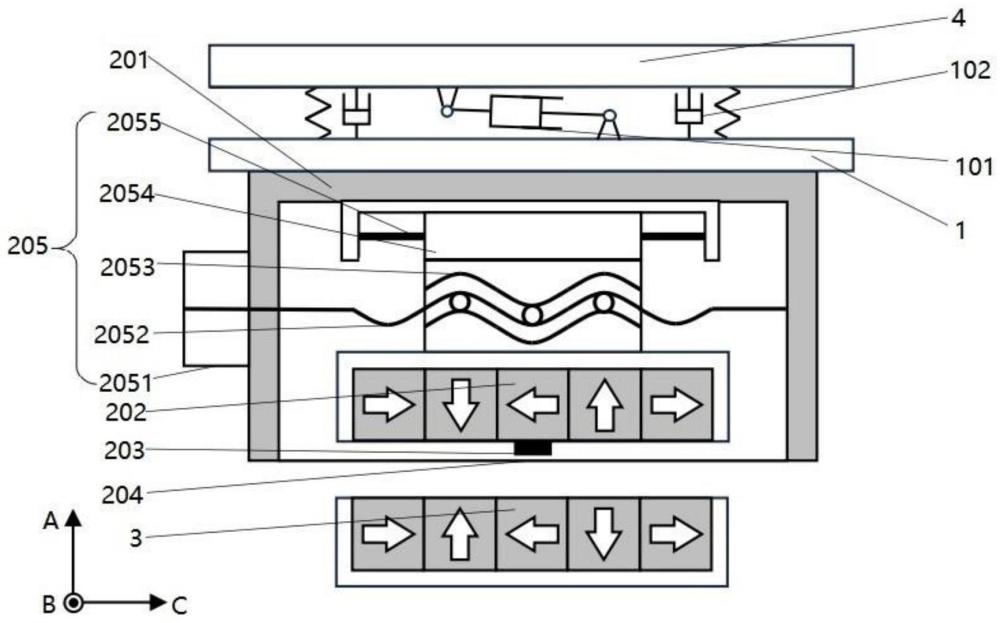
10、进一步地,所述框架基础为倒u型结构,在所述倒u型结构的开口处设有防尘盖板,所述直线驱动机构、车载永磁模块以及第一位移传感器位于由倒u型结构和防尘盖板构成的腔体内。
11、进一步地,所述直线驱动机构包括直线导轨和直线驱动装置;所述直线导轨包括导杆和滑块,所述导杆固设于所述框架基础上,所述滑块可滑动地设于所述导杆上,所述车载永磁模块设于所述滑块上,所述直线驱动装置与所述车载永磁模块连接。
12、进一步地,所述直线驱动装置包括驱动电机和丝杠螺母机构,所述驱动电机的输出端与所述丝杠螺母机构的丝杠连接,所述丝杠螺母机构与所述车载永磁模块连接。
13、当驱动电机驱动丝杠旋转时,丝杠螺母机构的滚珠螺母带动车载永磁模块沿着导杆横向移动。
14、进一步地,所述直线驱动装置为永磁同步直线电机,所述永磁同步直线电机的定子固定在所述框架基础上,所述车载永磁模块与所述永磁同步直线电机的动子连接。
15、进一步地,所述直线驱动装置为同步带传动机构,所述同步带传动机构包括主动轮、从动轮、绕设于所述主动轮和从动轮上的同步带、以及驱动电机;所述主动轮和从动轮固定在框架基础上,所述驱动电机的输出端与所述主动轮连接,所述同步带通过压板与所述车载永磁模块连接。
16、基于同一构思,本发明提供一种如上所述永磁悬浮系统的控制方法,所述控制方法包括以下步骤:
17、当永磁悬浮系统处于起浮模式时,根据第一位移传感器采集的横向位移控制直线驱动机构动作,使第一位移传感器采集的横向位移为零;
18、当永磁悬浮系统处于落浮模式时,根据第一位移传感器采集的横向位移控制直线驱动机构动作,使第一位移传感器采集的横向位移增大,直到车载永磁模块与永磁轨道之间的斥力减小至不足以支撑列车悬浮;
19、当永磁悬浮系统处于悬浮模式且转向架两侧未设置导向装置时,根据第一位移传感器和第二位移传感器采集的横向位移控制直线驱动机构动作,利用车载永磁模块受到的横向力使转向架回到轨道中心;
20、当永磁悬浮系统处于悬浮模式且转向架两侧设置导向装置时,根据第一位移传感器采集的横向位移控制直线驱动机构动作,使第一位移传感器采集的横向位移为零。
21、进一步地,当永磁悬浮系统处于悬浮模式且转向架两侧未设置导向装置时,采用两级pid控制器对直线驱动机构进行控制,具体为:
22、将第二位移传感器采集的横向位移输入至第一级pid控制器,得到第一控制量;
23、将所述第一控制量与第一位移传感器采集的横向位移的差值输入至第二级pid控制器,得到第二控制量;
24、根据第二控制量控制直线驱动机构动作,利用车载永磁模块受到的横向力使转向架回到轨道中心,即通过主动控制车载永磁模块的运动使车载永磁模块受到的横向力变为使转向架回到轨道中心的回复力。
25、基于同一构思,本发明还提供一种磁浮列车,在所述磁浮列车的转向架的底部设有如上所述的永磁悬浮系统,且转向架的两侧未设置导向装置;
26、或者,在所述磁浮列车的转向架的底部设有如上所述的永磁悬浮系统,且转向架的两侧设有导向装置。
27、进一步地,所述导向装置为如上所述的永磁悬浮系统或电磁铁或导向轮;
28、当所述导向装置为电磁铁时,在轨道梁上设置铁磁性轨道板且所述铁磁性轨道板与所述电磁铁对应;当所述导向装置为导向轮时,所述导向轮与轨道梁接触。
29、有益效果
30、与现有技术相比,本发明的优点在于:
31、本发明的永磁悬浮系统,车载永磁模块在直线驱动机构的作用下,永磁轨道对车载永磁模块产生的横向力依次通过直线驱动机构、框架基础、转向架传递到车体,由于车体质量远大于车载永磁模块的质量,使车载永磁模块可以抵抗巨大的横向力向轨道中心移动,而横向力将在两级悬挂机构的传递过程中被化解掉,消除了负刚度的横向力带来的横向不稳定性,使永磁悬浮系统在一定范围内仅提供正刚度的垂向力。
32、由于悬浮力仍由车载永磁模块与永磁轨道产生,本发明系统保留了现有永磁悬浮系统零功率悬浮的特点,仅在移动车载永磁模块时消耗一定的能量以抵抗其偏移,相对于电磁导向的永磁悬浮系统,本发明无需持续通电,降低了电能消耗;相对于机械导向的永磁悬浮系统,本发明不会与轨道接触而产生摩擦阻力和噪音。
技术特征:
1.一种永磁悬浮系统,其特征在于,所述系统包括:
2.根据权利要求1所述的永磁悬浮系统,其特征在于:所述车载永磁模块采用halbach阵列。
3.根据权利要求1所述的永磁悬浮系统,其特征在于:所述框架基础为倒u型结构,在所述倒u型结构的开口处设有防尘盖板,所述直线驱动机构、车载永磁模块以及第一位移传感器位于由倒u型结构和防尘盖板构成的腔体内。
4.根据权利要求1~3中任一项所述的永磁悬浮系统,其特征在于:所述直线驱动机构包括直线导轨和直线驱动装置;所述直线导轨包括导杆和滑块,所述导杆固设于所述框架基础上,所述滑块可滑动地设于所述导杆上,所述车载永磁模块设于所述滑块上,所述直线驱动装置与所述车载永磁模块连接。
5.根据权利要求4所述的永磁悬浮系统,其特征在于:所述直线驱动装置包括驱动电机和丝杠螺母机构,所述驱动电机的输出端与所述丝杠螺母机构的丝杠连接,所述丝杠螺母机构与所述车载永磁模块连接。
6.根据权利要求4所述的永磁悬浮系统,其特征在于:所述直线驱动装置为同步带传动机构,所述同步带传动机构包括主动轮、从动轮、绕设于所述主动轮和从动轮上的同步带、以及驱动电机;所述主动轮和从动轮固定在框架基础上,所述驱动电机的输出端与所述主动轮连接,所述同步带通过压板与所述车载永磁模块连接。
7.一种如权利要求1~6中任一项所述永磁悬浮系统的控制方法,其特征在于,所述控制方法包括以下步骤:
8.根据权利要求7所述永磁悬浮系统的控制方法,其特征在于,当永磁悬浮系统处于悬浮模式且转向架两侧未设置导向装置时,采用两级pid控制器对直线驱动机构进行控制,具体为:
9.一种磁浮列车,其特征在于,在所述磁浮列车的转向架的底部设有如权利要求1~6中任一项所述的永磁悬浮系统,且转向架的两侧未设置导向装置;
10.根据权利要求9所述的磁浮列车,其特征在于:所述导向装置为如权利要求1~6中任一项所述的永磁悬浮系统或电磁铁或导向轮;
技术总结
本发明公开了一种磁浮列车及永磁悬浮系统与控制方法,所述永磁悬浮系统包括框架基础、直线驱动机构、车载永磁模块、第一位移传感器、第二位移传感器以及控制模块;直线驱动机构、第一位移传感器和第二位移传感器分别与控制模块电性连接;框架基础设于磁浮列车的转向架上,直线驱动机构设于框架基础上,车载永磁模块设于直线驱动机构上;控制模块根据车载永磁模块相对于永磁轨道的横向位移或者车载永磁模块相对于永磁轨道的横向位移和转向架相对于轨道中心的横向位移控制直线驱动机构动作,以消除车载永磁模块受到的横向力或者使转向架回到轨道中心。本发明能够实现零功率稳定悬浮。
技术研发人员:吴定鼎,张文跃,罗华军,朱跃欧,李海涛,王家恒
受保护的技术使用者:中车株洲电力机车有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!