驻车控制方法、装置、车辆及存储介质与流程
本发明实施例涉及智能控制,具体涉及驻车控制方法、装置、车辆及存储介质。
背景技术:
1、相关技术中车辆的驻车通常是以固定的减速度进行制动,直到车辆停止,从而影响了车辆驻车的可靠性。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种驻车控制方法、装置、车辆及存储介质,用于解决现有技术中存在的车辆驻车的可靠性低的问题。
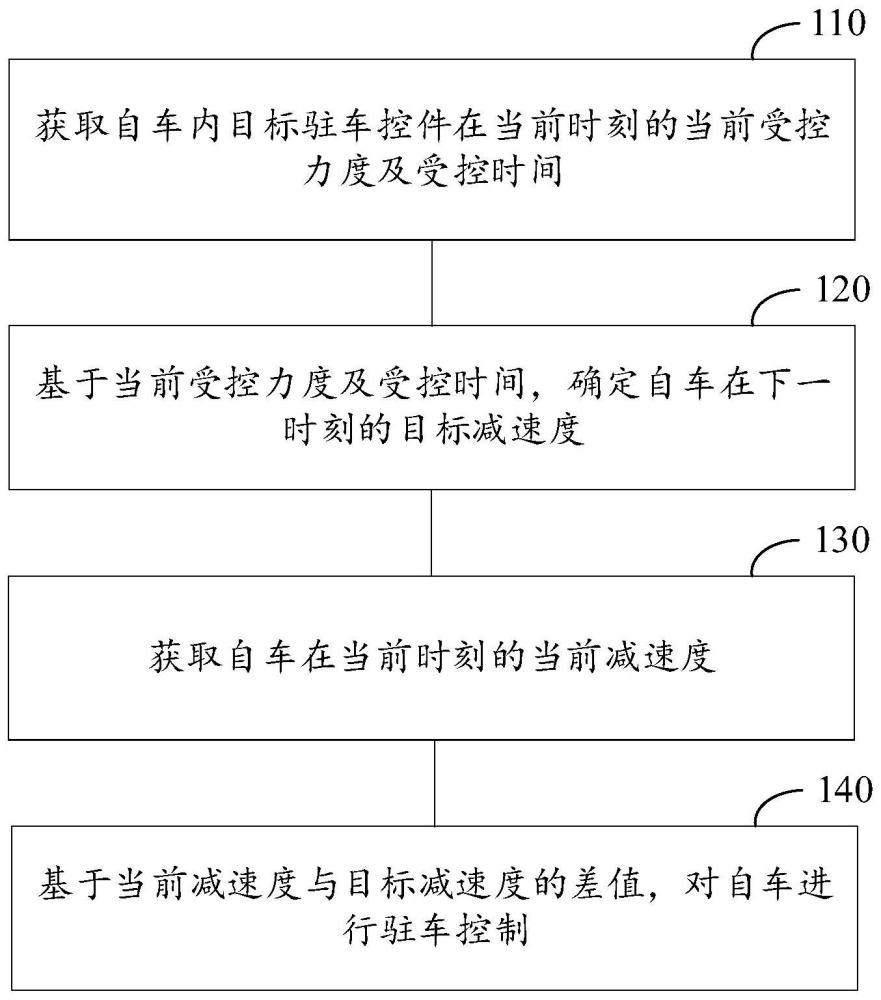
2、根据本发明实施例的一个方面,提供了一种驻车控制方法,应用于自车,方法包括:获取自车内目标驻车控件在当前时刻的当前受控力度及受控时间;基于当前受控力度及受控时间,确定自车在下一时刻的目标减速度;获取自车在当前时刻的当前减速度;基于当前减速度与目标减速度的差值,对自车进行驻车控制。
3、在一种可选的实施方式中,获取自车内目标驻车控件在当前时刻的当前受控力度及受控时间,包括:
4、获取目标驻车控件在当前时刻的受控压力,当前受控力度包括受控压力;
5、基于受控压力的持续时间,确定目标驻车控件的受压时间,受控时间包括受压时间。
6、在一种可选的实施方式中,基于当前受控力度及受控时间,确定自车在下一时刻的目标减速度,包括:
7、将受压时间与目标受压时间进行比对;
8、当受压时间大于或者等于目标受压时间时,获取受控压力所对应的减速度;
9、将受控压力所对应的减速度,作为自车在下一时刻的目标减速度。
10、在一种可选的实施方式中,获取自车内目标驻车控件在当前时刻的当前受控力度及受控时间,包括:
11、获取目标驻车控件在当前时刻的受控拉力,当前受控力度包括受控拉力;
12、基于受控拉力的持续时间,确定目标驻车控件的受拉时间,受控时间包括受拉时间。
13、在一种可选的实施方式中,基于当前受控力度及受控时间,确定自车在下一时刻的目标减速度,包括:
14、将受拉时间与目标受拉时间进行比对;
15、当受拉时间大于或者等于目标受拉时间时,获取受控拉力所对应的减速度;
16、将受控拉力所对应的减速度,作为自车在下一时刻的目标减速度。
17、在一种可选的实施方式中,基于当前减速度与目标减速度的差值,对自车进行驻车控制,包括:
18、基于目标减速度,查询自车驻车所对应的目标制动扭矩;
19、获取自车内驱动电机在的最大制动扭矩;
20、当最大制动扭矩大于或者等于目标制动扭矩时,驱动该驱动电机对自车进行驻车控制,驱动电机在当前减速度下的当前制动扭矩小于或者等于最大制动扭矩。
21、在一种可选的实施方式中,基于当前减速度与目标减速度的差值,对自车进行驻车控制,包括:
22、当最大制动扭矩小于目标制动扭矩时,驱动该驱动电机及自车内的卡钳机构对自车进行驻车控制。
23、根据本发明实施例的另一方面,提供了一种驻车控制装置,应用于自车,包括:数据获取模块,用于获取自车内目标驻车控件在当前时刻的当前受控力度及受控时间;速度确定模块,用于基于当前受控力度及受控时间,确定自车在下一时刻的目标减速度;速度获取模块,用于获取自车在当前时刻的当前减速度;驻车控制模块,用于基于当前减速度与目标减速度的差值,对自车进行驻车控制。
24、根据本发明实施例的另一方面,提供了一种车辆,包括:处理器、存储器、通信接口和通信总线,处理器、存储器和通信接口通过通信总线完成相互间的通信;存储器用于存放至少一可执行指令,可执行指令使处理器执行前述一种驻车控制方法的操作。
25、根据本发明实施例的又一方面,提供了一种计算机可读存储介质,存储介质中存储有至少一可执行指令,可执行指令使车辆/装置执行前述一种驻车控制方法的操作。
26、本发明实施例提供的技术方案,通过获取自车内目标驻车控件在当前时刻的当前受控力度及受控时间,以基于当前受控力度及受控时间,确定自车在下一时刻的目标减速度,通过获取自车在当前时刻的当前减速度,并基于当前减速度与目标减速度的差值,对自车进行变速驻车控制,进而提升对自车进行驻车控制的可靠性。
27、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种驻车控制方法,其特征在于,应用于自车,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述自车内目标驻车控件在当前时刻的当前受控力度及受控时间,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述当前受控力度及受控时间,确定所述自车在下一时刻的目标减速度,包括:
4.根据权利要求1所述的方法,其特征在于,所述获取所述自车内目标驻车控件在当前时刻的当前受控力度及受控时间,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述当前受控力度及受控时间,确定所述自车在下一时刻的目标减速度,包括:
6.根据权利要求2或4所述的方法,其特征在于,所述基于所述当前减速度与所述目标减速度的差值,对所述自车进行驻车控制,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于所述当前减速度与所述目标减速度的差值,对所述自车进行驻车控制,包括:
8.一种驻车控制装置,其特征在于,应用于自车,所述装置包括:
9.一种车辆,其特征在于,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一可执行指令,所述可执行指令在车辆/装置上运行时,使得车辆/装置执行如权利要求1-7任意一项所述的驻车控制方法的操作。
技术总结
本发明实施例涉及智能控制技术领域,公开了驻车控制方法、装置、车辆及存储介质,该方法包括:获取自车内目标驻车控件在当前时刻的当前受控力度及受控时间;基于当前受控力度及受控时间,确定自车在下一时刻的目标减速度;获取自车在当前时刻的当前减速度;基于当前减速度与目标减速度的差值,对自车进行驻车控制。应用本发明的技术方案,能够提升驾驶员对自车进行驻车控制的可靠性。
技术研发人员:曾禹乔,吴晓东,张入伟,张其,文明鑫
受保护的技术使用者:阿维塔科技(重庆)有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!