通信中断情况下防止协同编队高速列车群发生碰撞的方法与流程
[0001]
本发明涉及一种列车紧急制动控制技术,尤其涉及一种通信中断情况下防止协同编队高速列车群发生碰撞的方法。
背景技术:
[0002]
协同编队(也叫虚拟连挂)是指多辆列车之间不依靠物理连接,而是通过无线通信实现多辆列车以相同的速度、极小的间隔运行的列车群体协同运行方式;随着轨道交通网络日趋完善、运输压力日渐增加,运输能力紧张问题亟待解决,通过提高列车运行控制效率提升轨道交通运输能力问题显得尤为重要;协同编队技术能有效缩小列车运行追踪间隔,在不改变轨道、线路等既有设施的条件下可大幅提升运输能力,尤其适用于目前运输能力已经饱和、靠现有技术难以继续提高的繁忙线路。
[0003]
协同编队的多辆列车,由于前、后车间隔距离小,其制动距离较短,为防止相邻列车之间发生碰撞,现有技术一般以发送位置信息的方式来防止碰撞,即前车向后车发送前车的位置信息,后车根据前车的位置信息来判断是否需要进行制动操作;由于列车运行环境较复杂,前、后车之间的通信难以得到绝对保证,于是本领域技术人员又在前述方案的基础上提出采用图像识别技术作为补充,即,当通信中断时,通过图像采集装置获取包含前车影像的图像,采用图像识别技术,根据图像识别出前车和后车之间的间隔距离,再根据识别出的间隔距离来判断是否需要进行制动操作;存在的问题是:由于真实环境中可能出现雨、雪、雾等天气,而且图像采集装置本身也可能出现故障,因此,实际情况中存在图像识别失效的风险。
技术实现要素:
[0004]
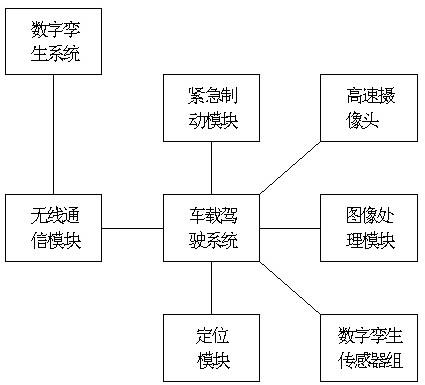
针对背景技术中的问题,本发明提出了一种通信中断情况下防止协同编队高速列车群发生碰撞的方法,所述协同编队高速列车群包含多辆以相同速度协同运行的列车;相邻两辆列车中,在前的列车记为前车,在后的列车记为后车;前车和后车的间隔距离小于或等于高速摄像头的可视距离;其特征在于:所述列车上搭载有车载驾驶系统、紧急制动模块、定位模块、无线通信模块、高速摄像头、数字孪生传感器组和图像处理模块,后方监控中心设置有数字孪生系统;紧急制动模块、定位模块、无线通信模块、高速摄像头、数字孪生传感器组和图像处理模块均与相应的车载驾驶系统连接;车载驾驶系统通过无线通信模块与数字孪生系统通信连接;相邻列车的车载驾驶系统通过无线通信模块通信连接;所述方法包括:所述定位模块能对列车自身的位置进行检测,并向相应车载驾驶系统实时输出位置信息;前车的车载驾驶系统通过无线通信模块将自身的位置信息实时发送给后车的车载驾驶系统;所述数字孪生传感器组能对列车周围的环境信息进行采集,并向相应车载驾驶系统实
时输出环境数据;车载驾驶系统收到环境数据后,通过无线通信模块将环境数据实时传输至数字孪生系统;所述数字孪生系统能根据收到的环境数据,在同一虚拟空间中构建出包含各辆列车及周围环境的实时数字模型;车载驾驶系统能通过高速摄像头获取列车前方的图像;获取到图像后,车载驾驶系统将图像实时发送至图像处理模块;虚拟空间中的虚拟列车模型上设置有对应高速摄像头的虚拟摄像头,虚拟摄像头在虚拟空间中的拍摄角度和视距范围与高速摄像头在真实环境中的拍摄角度和视距范围相同;所述图像处理模块能根据图像中的前车影像识别出前车与本车的间隔距离参数,并将间隔距离参数反馈给相应的车载驾驶系统;列车行进过程中,后车上的车载驾驶系统根据前车的位置信息和自身的位置信息计算出本车和前车的间隔距离参数,并将间隔距离参数实时输出至紧急制动模块,紧急制动模块将间隔距离参数和预设的制动控制距离参数进行比较,如间隔距离参数小于或等于制动控制距离参数,则紧急制动模块控制列车进行制动操作;列车行进过程中,若后车的车载驾驶系统在设定的时间范围内未收到前车的位置信息,则后车的车载驾驶系统控制高速摄像头工作,通过高速摄像头连续拍摄前方图像,并将拍摄到的图像实时传输给相应的图像处理模块;图像处理模块对图像进行连续识别,并持续向车载驾驶系统反馈间隔距离参数;车载驾驶系统将收到的间隔距离参数实时发送至相应的紧急制动模块;紧急制动模块将间隔距离参数和预设的制动控制距离参数进行比较,如间隔距离参数小于或等于制动控制距离参数,则紧急制动模块控制列车进行制动操作;高速摄像头开始工作,若后车的车载驾驶系统在设定的时间范围内未收到图像处理模块反馈的间隔距离参数时,后车的车载驾驶系统通过无线通信模块向数字孪生系统发出图像调用指令;此时,将虚拟空间中后车的虚拟列车模型上的虚拟摄像头记为摄像头a;收到图像调用指令后,数字孪生系统控制摄像头a连续获取虚拟空间中的虚拟图像,并将虚拟图像实时传输给后车的车载驾驶系统;后车的车载驾驶系统将收到的虚拟图像实时传输给相应的图像处理模块;图像处理模块对虚拟图像进行连续识别,并持续向车载驾驶系统反馈间隔距离参数;车载驾驶系统将收到的间隔距离参数实时发送至相应的紧急制动模块;紧急制动模块将间隔距离参数和预设的制动控制距离参数进行比较,如间隔距离参数小于或等于制动控制距离参数,则紧急制动模块控制列车进行制动操作。
[0005]
本发明的原理是:本发明的方案能提供三个级别的防碰撞保护,第一级,即根据前车的位置信息所确定出的间隔距离参数来进行制动操作,第二级,即根据高速摄像头采集的图像得到的间隔距离参数来进行制动操作,第三级,即根据虚拟摄像头获取的虚拟图像得到的间隔距离参数来进行制动操作。
[0006]
第一级的防碰撞保护所适用的条件是前、后车之间的通信正常,后车能够及时收到前车的位置信息,后车根据前车的位置信息得出间隔距离参数并依据间隔距离参数判断是否需要作制动操作;当前、后车之间的通信意外中断时,后车就无法及时收到前车的位置信息了,此时,第二级防碰撞保护就开始发挥作用了,后车通过高速摄像头采集前方图像,基于现有的图像处理手段,我们就能从图像中识别出前车的影像并获取到相应的间隔距离参数,并依据此间隔距离参数判断是否需要作制动操作;实际情况中,可能存在雨、雪、雾等
天气,高速摄像头本身也可能出现故障,而且在恶劣天气下,前、后车之间的通信稳定性也存在问题,这时,本发明的第三级防碰撞保护就可以发挥作用了,基于现有技术可知,数字孪生技术能够在虚拟空间中复现出与真实环境相同的场景,由于虚拟摄像头的拍摄角度和视距范围与高速摄像头的拍摄角度和视距范围相同,因此,虚拟图像中前车影像所体现出的距离信息也与真实图像中前车影像所体现出的距离信息相同,所不同的是,在虚拟空间中,我们可以排除雨、雪、雾等恶劣天气对摄像设备以及拍摄效果的影响,从而得到清晰的虚拟图像,再依据图像识别技术,就能从虚拟图像中识别出前车影像以及相应的间隔距离参数。这样我们就能避免恶劣天气对图像识别的干扰,充分利用虚拟挛生以虚控实这一特点,为制动操作判断提供可靠的依据,最终就能防止相邻列车发生碰撞,保证协同编队高速列车群的运行安全性。
[0007]
本发明的有益技术效果是:提出了一种通信中断情况下防止协同编队高速列车群发生碰撞的方法,该方案能够在高速列车群之间通信和高速摄像头都失效的情况下,及时地输出列车之间的间隔距离参数,提高列车运行的安全性。
附图说明
[0008]
图1、本发明的电气原理示意图。
具体实施方式
[0009]
一种通信中断情况下防止协同编队高速列车群发生碰撞的方法,所述协同编队高速列车群包含多辆以相同速度协同运行的列车;相邻两辆列车中,在前的列车记为前车,在后的列车记为后车;前车和后车的间隔距离小于或等于高速摄像头的可视距离;其创新在于:所述列车上搭载有车载驾驶系统、紧急制动模块、定位模块、无线通信模块、高速摄像头、数字孪生传感器组和图像处理模块,后方监控中心设置有数字孪生系统;紧急制动模块、定位模块、无线通信模块、高速摄像头、数字孪生传感器组和图像处理模块均与相应的车载驾驶系统连接;车载驾驶系统通过无线通信模块与数字孪生系统通信连接;相邻列车的车载驾驶系统通过无线通信模块通信连接;所述方法包括:所述定位模块能对列车自身的位置进行检测,并向相应车载驾驶系统实时输出位置信息;前车的车载驾驶系统通过无线通信模块将自身的位置信息实时发送给后车的车载驾驶系统;所述数字孪生传感器组能对列车周围的环境信息进行采集,并向相应车载驾驶系统实时输出环境数据;车载驾驶系统收到环境数据后,通过无线通信模块将环境数据实时传输至数字孪生系统;所述数字孪生系统能根据收到的环境数据,在同一虚拟空间中构建出包含各列列车及周围环境的实时数字模型;车载驾驶系统能通过高速摄像头获取列车前方的图像;获取到图像后,车载驾驶系统将图像实时发送至图像处理模块;虚拟空间中的虚拟列车模型上设置有对应高速摄像头的虚拟摄像头,虚拟摄像头在虚拟空间中的拍摄角度和视距范围与高速摄像头在真实环境中
的拍摄角度和视距范围相同;所述图像处理模块能根据图像中的前车影像识别出前车与本车的间隔距离参数,并将间隔距离参数反馈给相应的车载驾驶系统;列车行进过程中,后车上的车载驾驶系统根据前车的位置信息和自身的位置信息计算出本车和前车的间隔距离参数,并将间隔距离参数实时输出至紧急制动模块,紧急制动模块将间隔距离参数和预设的制动控制距离参数进行比较,如间隔距离参数小于或等于制动控制距离参数,则紧急制动模块控制列车进行制动操作;列车行进过程中,若后车的车载驾驶系统在设定的时间范围内未收到前车的位置信息,则后车的车载驾驶系统控制高速摄像头工作,通过高速摄像头连续拍摄前方图像,并将拍摄到的图像实时传输给相应的图像处理模块;图像处理模块对图像进行连续识别,并持续向车载驾驶系统反馈间隔距离参数;车载驾驶系统将收到的间隔距离参数实时发送至相应的紧急制动模块;紧急制动模块将间隔距离参数和预设的制动控制距离参数进行比较,如间隔距离参数小于或等于制动控制距离参数,则紧急制动模块控制列车进行制动操作;高速摄像头开始工作,若后车的车载驾驶系统在设定的时间范围内未收到图像处理模块反馈的间隔距离参数时,后车的车载驾驶系统通过无线通信模块向数字孪生系统发出图像调用指令;此时,将虚拟空间中后车的虚拟列车模型上的虚拟摄像头记为摄像头a;收到图像调用指令后,数字孪生系统控制摄像头a连续获取虚拟空间中的虚拟图像,并将虚拟图像实时传输给后车的车载驾驶系统;后车的车载驾驶系统将收到的虚拟图像实时传输给相应的图像处理模块;图像处理模块对虚拟图像进行连续识别,并持续向车载驾驶系统反馈间隔距离参数;车载驾驶系统将收到的间隔距离参数实时发送至相应的紧急制动模块;紧急制动模块将间隔距离参数和预设的制动控制距离参数进行比较,如间隔距离参数小于或等于制动控制距离参数,则紧急制动模块控制列车进行制动操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1