用于确定轨道的实际位置的方法及测量车辆与流程
1.本发明涉及一种借助于能在轨道上行驶的测量车辆来确定轨道的实际位置的方法,其中借助于布置在测量车辆上的非接触式检测系统来自动检测定位于轨道的侧向环境中的参考点并确定这些参考点到轨道的相应实际距离。本发明还涉及一种用于执行该方法的测量车辆。
背景技术:
2.在道碴轨道的情况下,支撑在道床中的轨排在其局部位置上会受到行驶和气候的影响。为了检查轨道的当前实际位置,并且尤其是在修理工作之前,应使用专门为此提供的测量车定期进行测量。相应配备的轨道施工机械也可用作测量车。
3.公知的测量方法利用了位于轨道旁的参考点,这些参考点附接至诸如电线杆之类的固定设施。这样的参考点又称为固定点或固点。参考点通常被限定为标记栓的末端(spitze)。将每个参考点到轨道的预定位置录入到目录中。这样针对轨道确定目标位置,尤其是针对圆弧和过渡曲线以及斜断面确定目标位置。主要点之间通常还布置有中间参考点。
4.专利文献at 518579a1公开了一种用于自动检测参考点并测定参考点的位置的方法及测量车辆。为此,提供了立体相机系统,该立体相机系统连续记录轨道的侧向环境中的图像对(bildpaaren)。评估装置利用模式识别来确定图像对之一中是否显示有参考点。在另一步骤中,通过评估视差来确定所找到的参考点的位置。还布置了惯性测量单元来连续确定测量车辆的位置。
技术实现要素:
5.本发明的目的是改进前述方法,从而能够以简单的方式确定轨道位置校正。此外,还将提出一种用于执行该改进的方法的测量车辆。
6.根据本发明,上述这些目的通过独立权利要求1和10的特征来实现。本发明的有利实施方案在从属权利要求中提出。
7.就此,借助于布置在测量车辆上的惯性测量系统来检测轨道的三维轨迹,其中借助于计算机单元将轨迹划分为轨迹分段,每个轨迹分段具有有关第一参考点的分段起点以及有关第二参考点的分段终点,其中针对关于相关联的参考点的每个轨迹分段定义虚拟的长弦,其中针对每个轨迹分段计算轨迹和分别定义的长弦之间的实际距离。这样,有利地组合自动确定参考点与检测轨道的轨迹。
8.轨迹代表轨道轴线的走向(verlauf)或铁轨的工作面(fahrkante)的走向。所确定的轨迹分段到相应的长弦的实际距离允许对位置误差进行简单的评估。例如,通过与轨道路线的预定几何形状(例如直线、圆弧、过渡曲线)进行比较来评估相对位置误差。在一优选变型方案中,与轨道的预定目标位置进行比较。任何情况下,所述方法都允许相对于检测到的参考点来准确地校正轨道位置。实际距离视为所谓的弓高,在轨道施工中通常借助于该
弓高来确定、尤其是预先确定轨道的曲率。
9.如果在与相应的长弦相关联的局部坐标系中计算实际距离,则可进一步简化对位置误差的评估。为此,还将对应的轨迹分段变换到该局部坐标系中。方便地,将局部坐标系的原点定位在长弦的零点处,其中坐标系的一个轴线指向长弦的方向。以此方式,获得与轨迹分段的实际距离作为局部坐标系中的向量。
10.有利地,针对实际距离计算水平向量和竖直向量。从实际距离的竖直向量可以直接推导出用于校平轨道的值。实际距离的水平向量形成用于轨道的侧向校准的数据库。
11.所述方法的进一步改进方案的特征在于,预定轨道的目标路线,将实际距离与目标路线和相应的长弦之间的相关联的目标距离相比较;并且可以由此推导出校正值以供后续轨道处理。这些校正值随后可用于控制轨道施工机械,以便将轨道带入预定的目标位置。
12.有利的是,关于相应的参考点预定轨道的水平目标距离和/或竖直目标距离,其中将校正值与检测到的实际距离和相关联的目标距离之间的差值相比较。以此方式,修正后的校正值可用于将轨道带入参考的目标位置。
13.为了提高精度以及简化后续的轨道位置的校正,分别针对轨道的左铁轨和轨道的右铁轨检测各自的三维轨迹。这样针对每个铁轨获得与相应的长弦的各自的实际距离,以便由此推导出用于轨道位置校正的铁轨相关预定值。这样尤其是可以简单地检测轨道的超高误差或相应铁轨的不同下沉的单独误差。
14.所述方法的进一步改进方案中,借助于gnss接收装置检测测量车辆的gnss位置,并且将检测到的轨道的实际位置与gnss位置相比较。借助于gnss位置,可确定轨道的地理参考几何形状,这意味着将所获得的数据在无需进一步变换的情况下即可用于上级系统。
15.为了高效地处理测量结果,有利的是,借助于惯性测量系统,针对每个测量日期预定时间戳作为公共时间基准。以此方式,可以轻松结合惯性测量系统、非接触式参考点检测系统以及任选的gnss接收装置的测量结果。
16.在所述方法的另一实施方案中,借助于校正过程,确定惯性测量系统和非接触式参考点检测系统以及任选的gnss接收装置的布置的几何关系。这在两个系统并非严格布置在共同的测量平台上时尤其有用。
17.根据本发明的测量车辆包括车架,该车架能在轨道上的轨上行走机构上移动,其中在该测量车辆上布置有用于自动检测定位于轨道的侧向环境中的参考点的非接触式检测系统以及惯性测量单元。在此,设置包括惯性测量单元的惯性测量系统以检测轨道的三维轨迹,将非接触式检测系统和惯性测量系统耦合到计算机单元,并且计算机单元被配置为将轨迹划分为轨迹分段,每个轨迹分段具有有关第一参考点的分段起点以及有关第二参考点的分段终点,以针对关于相关联的参考点的每个轨迹分段定义虚拟的长弦,并以针对每个轨迹分段计算轨迹和分别定义的长弦之间的实际距离。
18.因此,提出了一种车辆,利用该车辆能够以简单的方式执行所述方法。具体而言,在测量运行期间,借助于测量车辆首先自动检测和保存参考点和轨道的轨迹。计算机单元访问轨道的该参考点相关几何数据,以便划分轨迹、定义相应的长弦并计算轨迹分段和相关联的长弦之间的距离。
19.这里有利的是,非接触式检测系统包括用于记录轨道的侧向环境的图像对的立体相机系统以及用于检测和确定参考点的位置的评估装置。这样的系统提供了非常准确的结
果,同时出错率很低。
20.在一改进方案中,gnss接收装置连接到车架,其中在车架上布置有用于确定车架相对于轨道的位置的位置测量装置。借助于位置测量装置来检测车架相对于轨道的任何运动。这些相对运动的连续计算补偿会获得测量车辆的精确gnss位置与轨道位置的准确参考。结果,可使用存储的gnss位置数据,随后借助于计算机单元将该gnss位置数据与检测到的轨道的参考点相关的几何数据相比较。
附图说明
21.下面结合附图举例详述本发明。附图中示意地示出了:
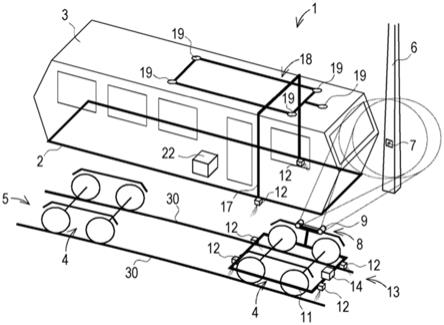
22.图1示出在轨道上的在参考点近旁的测量车辆;
23.图2示出轨道的轨迹;
24.图3示出轨迹分段与相关联长弦和实际距离的俯视图;
25.图4示出图3的细节图;
26.图5示出轨迹与相关联的长弦的侧视图;
27.图6示出框图和数据处理;
28.图7示出检测地理参考轨迹;以及
29.图8示出替代评估逻辑的框图。
具体实施方式
30.图1示出了具有车架2的测量车辆1,车体3构建在该车架2上。测量车辆1可借助于轨上行走机构4在轨道5上移动。为了更佳示出,车架2连同车体3一起示出为从轨上行走机构4上抬离。在轨道5的侧向环境中,存在具有标记栓7的桅杆6。标记栓7的末端定义了参考点a、b、c,用于确定轨道5的位置。其他标记对象也可定义参考点a、b、c,例如上面印有线条或彩色区域的标记。此外,诸如条形码或字母和数字序列之类的唯一标识符也可以表征参考点a、b、c。
31.轨上行走机构4优选地构造为转向架。在前转向架上布置有用于自动检测相应参考点a、b、c的非接触式检测系统8。在测量运行期间,借助于立体相机系统9连续记录图像对,并借助于评估装置10对图像对进行评估。一旦通过模式识别在图像对之一中识别出标记栓7或其他参考点标记,则确定对应参考点a、b、c的位置。例如,在水平方向上和竖直方向上确定相应参考点a、b、c到轨道5的实际距离h、v,其中还记录在轨道纵向方向s上的相应位置。
32.检测系统8有利地布置在测量框架11上。测量框架11与转向架的轮轴相连接,使得车轮的运动在无弹簧效应的情况下传递到测量框架11。相对于轨道,测量框架11仅具有侧向运动或摆动运动。这些运动借助于布置在测量框架11上的位置测量装置12来检测。这些位置测量装置例如构造为激光线交点传感器(laserlinienschnittsensoren)。
33.除了确定检测系统8相对于轨道5的位置之外,这些位置测量装置12还用作构建在测量框11上的惯性测量系统13的组件。惯性测量系统13包括作为中央元件的惯性测量单元14。在测量运行期间,利用惯性测量单元14检测轨道5的轨迹15,其中借助于来自位置测量装置12的数据来补偿惯性测量单元14相对于轨道的相对运动。此外,惯性测量系统13包括
导航处理器16,该导航处理器16输出为了后续评估已经被校正的轨道5的轨迹15。
34.gnss接收装置18的载架17与车架2刚性连接。该gnss接收装置包括多个相对于彼此布置的gnss天线19,用于精确地检测测量车辆1的gnss位置20。为了检测车架2相对于轨道5的摆动运动,车架2上还布置有另外的位置测量装置12。这里也使用例如激光线交点传感器。在此,使用系统处理器21来联合评估接收自gnss天线19的信号并补偿相对于轨道5的运动。
35.有意义的是,在测量运行之前校正测量系统8、13、18的几何关系。在此,确定参考点检测系统8和gnss天线19相对于转向架的测量框架11的位置和取向。根据测量框架11的构造(konstruktion)获知惯性测量单元14的位置和取向。校正的结果为参考点检测系统8相对于惯性测量单元14的移位和旋转。
36.图2示出了在测量运行期间检测的轨道5的轨迹15。在此,借助于布置在测量车辆1中的计算机单元22将轨迹15的坐标转换到局部地平坐标系xyz。该坐标系xyz的原点位于轨迹15的起点处。x轴指向北方,y轴指向东方,z轴指向下方。还借助于参考点检测系统8检测沿着测量部段的参考点a、b、c。以此方式,检测测量部段的有关参考点的轨道几何形状并将有关参考点的轨道几何形状存储在耦合到计算机单元22的存储器单元中。
37.在下一方法步骤中,借助于计算机单元22将检测和存储的轨迹15划分为轨迹分段15
ab
、15
bc
,如图3所示。在此,相应的分段起点与第一参考点a或b有关,相应的分段终点与第二参考点b或c有关。例如,分段起点和分段终点被限定在正交于轨迹15取向且相关联的参考点a、b、c所在的参考平面中。有利地,确定轨道5相对于参考点a、b、c的参考目标位置27'的轨道连接点23
ab
、23
bc
也位于这些参考平面中。
38.此外,借助于计算机单元22针对每个轨迹分段15
ab
、15
bc
定义虚拟的长弦24
ab
、24
bc
。相应长弦24
ab
、24
bc
的起点形成相关联的局部坐标系x
ab y
ab z
ab
或x
bc y
bc z
bc
的原点。相应的x轴x
ab
、x
bc
沿相关联的长弦24
ab
、24
bc
的方向取向。相应的y轴y
ab
、y
bc
水平延伸,z轴z
ab
、z
bc
指向下方。有利地,相应的长弦24
ab
、24
bc
的起点与相关联的轨迹分段15
ab
、15
bc
的分段起点一致,如图3所示。
39.利用这样的几何定义,计算机单元22连续地或以预定间隔针对每个轨迹分段15
ab
、15
ab
计算轨迹15和各相关联的长弦24
ab
、24
bc
之间的实际距离25。这些计算出的实际距离25又称为弓高并形成用于后续轨道位置校正的计算的数据库。参考轨道5的目标路线27来预定目标距离26。该目标路线27最初是一系列预定的轨道几何分段,诸如直线、圆弧和过渡曲线。在已知连接点23a、23b相对于参考点a、b、c的目标距离值h'、v'的情况下,也可预定轨道5的参考目标位置27'。随后,有用的是,可以利用参考点a、b、c的已知坐标x
a y
a za来确定轨道绝对几何形状36。
40.图4和图5以俯视图和侧视图分别示出了参考点a的区域内的几何关系。相应地,距离25、26在图4中示出为水平向量而在图5中示出为竖直向量。轨道5的长弦24
ab
、轨迹分段15
ab
和目标路线27用于计算校正值28。在此,参考系为相关联的局部坐标系x
ab y
ab z
ab
。
41.将在轨道5上的相应点处获得的实际距离25与目标距离26相比较,以便由此推导出校正值28。也可以直接由实际距离25(实际弓高)和预定的轨道几何形状(曲率)推导出校正值28。具体而言,在图4中,示出了用于轨道5的侧向移位的校正值28,在图5中,示出了用于提升轨道5的校正值28。
42.根据参考点a、b、c的列表(例如,在轨道纵向方向s上的里程),获知相应参考点a、b、c和轨道5的相关联的连接点23a之间的水平目标距离h'和竖直目标距离v'。此外,获知在测量运行期间借助于非接触式检测系统8所测得的轨道5的实际位置与相应参考点a、b、c之间的实际距离h、v。这些实际距离优选地确定为正交于轨道的路线取向的向量h、v。
43.随后,由获知的目标距离h'、v'和所检测的实际距离h、v形成相应的差值29。利用相应的差值29匹配校正值28,以便在后续轨道处理期间获得关于参考点a、b、c参考的轨道5的目标位置27'。例如,将与相应轨迹分段15
ab
相关的、在目标距离h'、v'与实际距离h、v之间的差值29均匀地应用于校正值28,以便获得经修正的校正值28'。
44.有利地,该计算过程针对轨道5的两个铁轨30单独执行。在此,检测相关联的铁轨30的工作面作为相应的轨迹15并与铁轨30的目标位置相比较。
45.在图6中示出了所涉及的系统的示例图。在计算机单元22中配置积分算法31,通过该积分算法31链接测量系统8、13、18的测量结果。参考点a、b、c的坐标构成对所参考的轨道几何形状进行积分的基础。gnss位置20也包含在积分过程中,从而结果是具有精确gnss坐标的轨迹15(地理参考的轨道几何形状)。这里重要的是确保所有坐标都与公共坐标系xyz相关。
46.惯性测量系统13首先确定来自惯性测量单元14的所校正的测量数据32。将该数据馈送到导航处理器16并且该数据产生临时轨迹15。通过积分算法31由该临时轨迹15计算出轨道5的相对路线33(轨道相对几何形状)。
47.导航处理器16根据公知的惯性导航原理工作,并借助于卡尔曼(klaman)滤波器来计算未知参数、当前位置、当前速度和当前取向。除了确定未知参数之外,还会估计惯性测量单元14的任何传感器误差。对应的校正数据34用于校正惯性测量单元14的测量结果。
48.评估算法35关于所检测的参考点a、b、c将轨迹15划分为轨迹分段15
ab
、15
bc
并关联到相应的长弦24
ab
、24
bc
。通过将计算出的实际距离25与目标距离26相比较,获得用于校平和校准轨道5的校正值28。
49.在图7中,示出了测量、校正和数据链接的结果。在测量运行期间,首先借助于惯性测量系统13检测测量数据32。此外,检测参考点a、b、c的坐标和gnss位置20。三维轨迹15的最终正确位置得自地理参考(georeferenzierung)。
50.图8中所示的方案用于确定轨道绝对几何形状36。借助于计算机单元22,使用卡尔曼滤波器将各个测量系统8、18、13的测量结果与参考点a、b、c的坐标x
a y
a za相比较。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1