一种水平运输机车及其主动安全系统的制作方法
1.本发明提供了一种水平运输机车及其主动安全系统,属于隧道施工设备领域,尤其涉及一种在隧道施工中通过感知周围环境进行安全驾驶控制的水平运输机车。
背景技术:
2.在隧道施工中,通常由施工人员驾驶水平运输机车来运输土石。水平运输机车也称为水平运输编组。
3.在隧道施工过程中,存在湿度大、噪声大、温度异常等恶劣的施工工况,而且隧道掘进施工通常是长时间连续施工,施工人员工作条件艰苦,工作强度大。长时间、高强度地在恶劣环境中工作,容易导致机车驾驶人员注意力不集中、疲劳驾驶的情况,容易引起安全事故。
4.相较于城市地铁等交通设备,水平运输机车通常处于封闭且严格管理的隧道环境,地铁的安全驾驶控制方法无法直接转用到水平运输机车。而且,水平运输机车在隧道中转弯时,车辆的安全探测设备,例如雷达,探测距离受限,机车监控范围变小,若采用与直线隧道处相同的安全措施,可能会使得水平运输机车在进行急停等操作时空间受限,存在较大的安全隐患。因此,对于隧道施工中的水平运输机车,迫切需要一种可以保障行车的主动安全系统。
技术实现要素:
5.本发明的目的在于提供一种水平运输机车及其主动安全系统,用于解决隧道施工过程中水平运输机车在转弯行驶时存在安全隐患的问题。
6.为了实现上述目的,本发明提供了一种水平运输机车的主动安全系统,包括控制系统和用于获取机车运行方向前方点云数据的雷达模块,控制系统连接雷达模块;
7.在机车运行过程中,雷达模块获取机车运行方向前方的点云数据,控制系统根据所述点云数据识别出监控区域内的轨道,并计算出监控区域内的轨道长度;控制系统根据所述监控区域内的轨道长度和预先获取的安全时间,计算得到安全速度,将所述安全速度作为当前机车运行过程中的极限速度;所述安全时间至少大于发出急停指令到机车响应该急指令进行制动的时间。
8.机车在隧道中行驶时,若处于直轨道,则水平运输机车的雷达模块能够探测到足够的监控区域,若遇到转弯或有障碍物遮挡的情况,则雷达模块的监控区域就会受到限制,此时还采用与直轨道行驶相同的安全措施,即采用直轨道行驶时的极限速度,可能导致转弯时的制动距离不足,影响机车及人员安全。为保障水平运输机车在隧道中的安全行驶,本发明提供的主动安全系统包括控制系统和雷达模块,通过雷达模块,采集机车运行方向前方环境的点云数据,控制系统根据点云数据识别出监控区域内的轨道并计算出轨道长度。控制系统根据轨道该轨道长度和预先存储的安全时间计算出安全速度,将安全速度作为机车运行的极限速度对水平运输机车的当前车速进行调整,从而在机车运行在弯轨道时,降
低了机车运行的极限速度,从而保证机车在当前车速下满足安全急停要求,保障机车及人员安全,降低安全隐患。
9.进一步地,在上述系统中,所述安全速度通过如下关系进行计算:安全速度与安全时间的乘积加上安全速度下的制动距离等于所述监控区域内的轨道长度。
10.将安全速度作为未知数,可以得到安全速度下的制动距离,进而通过获取的监控区域内轨道长度,以及预先得到的安全时间,进行求解可以得到安全速度,计算简单。
11.进一步地,在上述系统中,所述安全速度通过如下关系进行计算:安全速度与安全时间的乘积加上机车在最大运行车速下的最远制动距离等于所述监控区域内的轨道长度。
12.还能通过在控制系统中预先存储安全时间,以及机车在最大运行车速下的最远制动距离,对安全速度进行求解,采用机车在最大运行车速下的最远制动距离,能够为机车运行提供更高的安全保障。
13.进一步地,在上述系统中,在将所述安全速度作为当前机车运行过程中的极限速度控制机车运行的过程中,还通过雷达模块实时探测监控区域内是否存在障碍物,并在探测到障碍物时获取机车与障碍物之间的距离;
14.若机车与障碍物之间的距离等于设定预警距离,则向驾驶员发出报警;若机车与障碍物之间的距离等于设定警告距离,则向驾驶员和机车周边人员发出报警;若机车与障碍物之间的距离等于设定急停距离,则向驾驶员和机车周边人员发出报警,并控制机车进行停车;设定预警距离大于设定警告距离,设定警告距离大于设定急停距离。
15.在机车运行过程中,还通过雷达模块对监控区域内的环境进行探测识别,若存在障碍物,则获取机车与障碍物之间的距离。然后根据机车与障碍物之间的距离,采用分级报警措施,来满足机车运行的安全需求,降低安全隐患。
16.进一步地,在上述系统中,在探测监控区域内是否存在障碍物时,还根据监控区域内的轨道,以及预先得到的设定尺寸,确定主要监控区域,确定监控区域内是否存在障碍物时,仅处理所述主要监控区域内的点云数据。
17.根据监控区域的轨道进行扩展,得到主要监控区域,在探测障碍物时,只对主要监控区域内的情况进行探测和判断,能够降低机车分级报警时的计算量。
18.进一步地,在上述系统中,所述设定尺寸包括设定宽度和设定高度,确定主要监控区域的方法为:将监控区域内的轨道分别向外扩展设定宽度,得到轨道面,将轨道面向上扩展设定高度,得到所述主要监控区域。
19.进一步地,在上述系统中,通过如下公式计算得到设定宽度d:
20.d=[(d
1-d2)
÷
2+d3]
×
2+d2[0021]
式中,d1为机车本体的最大宽度,d2为监控区域内轨道的内边沿之间的间距,d3为机车行进时的安全宽度。
[0022]
进一步地,在上述系统中,通过如下公式计算得到设定高度h:
[0023]
h=h1+h2[0024]
式中,h1为机车本体的最大高度,h2为机车行进时的安全高度。
[0025]
进一步地,在上述系统中,所述雷达模块为激光雷达、毫米波雷达、超声波雷达或红外雷达。
[0026]
雷达模块用于对机车运行方向前方的环境进行感知以得到点云数据,实施本发明
时,可采用激光雷达、毫米波雷达、超声波雷达或红外雷达,便于获取。
[0027]
本发明还提供一种水平运输机车,采用上述水平运输机车的主动安全系统。
附图说明
[0028]
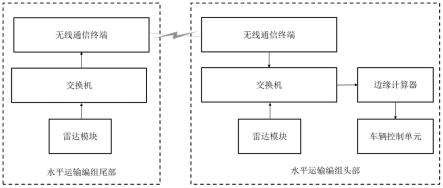
图1为本发明系统实施例中主动安全系统的结构框图;
[0029]
图2为本发明系统实施例中机车运行时的监控区域截面示意图;
[0030]
图3为本发明系统实施例中机车运行位置的截面示意图;
[0031]
图4为本发明系统实施例中机车运行位置侧面示意图;
[0032]
图5为本发明系统实施例中机车运行位置俯向示意图;
[0033]
图6为本发明系统实施例中机车预警位置示意图。
具体实施方式
[0034]
为了使本发明的目的、技术方案及优点更加清楚明了,以下结合附图及实施例,对本发明进行进一步详细说明。
[0035]
系统实施例:
[0036]
本发明提供一种水平运输机车的主动安全系统,水平运输机车也称为水平运输编组。如图1所示,主动安全系统包括车辆控制单元、边缘计算器和雷达模块。雷达模块用于在机车运行时获取周围环境的感知信息,并通过交换机和无线通信终端,将感知信息发送至边缘计算器;由边缘计算器对感知信息进行处理,得到主要监控区域的尺寸和障碍物信息,车辆控制单元根据主要监控区域的尺寸和障碍物信息,对车速进行相应的控制,并进行相应的分级报警处理。
[0037]
其中,雷达模块可以采用激光雷达、毫米波雷达、超声波雷达或红外雷达等传感器,本实施例中,雷达模块采用激光雷达。激光雷达安装在水平运输编组头部和水平运输编组尾部,安装时需要保证在机车运行过程中,能够采集到机车运行方向前方监控区域的激光点云数据。激光雷达还用于采集障碍物与机车之间的距离。
[0038]
在水平运输编组的头部和尾部还均安装有交换机和无线通信终端。激光雷达和无线通信终端的通信接口均为rj45接口,激光雷达与交换机通过rj45网线连接,交换机通过网线与无线通信终端连接,并采用标准的tcp/ip协议进行通信。水平运输编组头部的无线通信终端和水平运输编组尾部的无线通信终端通过无线通信方式传输数据。
[0039]
在水平运输编组头部还安装有边缘计算器和车辆控制单元。边缘计算器与水平运输编组头部的交互机通过网线连接,边缘计算器还通过rs485总线与车辆控制单元连接,采用mudbus-rtu将计算得到的障碍物信息发送至车辆控制单元。
[0040]
如图2所示,水平运输编组在运行时,根据激光雷达的扫描范围,以及水平运输编组的最大高度和最大宽度,结合两条轨道的位置,对主要监控区域的范围进行确定。具体的,如图3所示,主要监控区域在水平运输编组行进方向上的截面的宽度d为两条轨道的内边沿分别向外侧扩展设定距离,该截面的高度h为轨道形成的轨道面向上扩展一定距离后达到的高度。
[0041]
宽度d的计算公式为:
[0042]
d=[(d
1-d2)
÷
2+d3]
×
2+d2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0043]
式(1)中,d为主要监控区域的宽度,d1为水平运输编组本体的最大宽度,d2为双轨轨道的内边沿之间的间距,d3为水平运输编组行进时的安全宽度,dn根据经验进行确定,本实施例中dn的值取60mm,d4为水平运输编组行进时需要进入的区域的最小宽度。
[0044]
高度h的计算公式为:
[0045]
h=h1+h2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0046]
式(2)中,h为主要监控区域的高度,h1为水平运输编组本体的最大高度,h2为水平运输编组行进时的安全高度,hn≤h2≤(h
3-h1),hn根据经验确定,本实施例中hn的值取60mm,h3为水平运输编组行进时需要进入的区域的最小高度。
[0047]
激光雷达对主要监控区域内进行扫描时,可以得到轨道面周围环境的激光点云数据,然后根据轨道面的激光点云数据,绘制出轨道面的三维构型,进而计算出主要监控区域内轨道的长度l。
[0048]
主要监控区域内轨道的长度l可根据如下公式(3)计算:
[0049]
l=l1+v
×
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0050]
式(3)中,l为主要监控区域内轨道的长度,l1为设定安全距离,v为水平运输编组速度,t为设定安全时间,设定安全时间t大于急停指令发出到机车对其进行响应的时间。
[0051]
如图4所示,当水平运输编组在轨道上行驶的路径为直轨道时,水平运输编组的速度v可以达到最大速度v
max
,主要监控区域内轨道的长度l可以达到水平运输编组在最大速度v
max
下计算出的最大长度l
max
。
[0052]
如图5所示,当水平运输编组在轨道上行驶的路径为曲线时,即水平运输编组存在转弯操作时,由于激光雷达的性能以及转弯角度的限制,导致主要监控区域的长度无法达到l
max
,就需要对水平运输编组的速度进行限制,从而保证对主要监控区域的适应性调整。此时主要监控区域的长度l
2max
通过如下方法得到:通过激光雷达对轨道面进行扫描,得到轨道面的激光点云数据,然后根据轨道面的激光点云数据,绘制出轨道面的三维构型,根据轨道面的三维构型,计算出主要监控区域内的轨道长度l
2max
。
[0053]
根据l
2max
以及公式(3),可以反推计算出在主要监控区域内的轨道长度为l
2max
时,实际允许水平运输编组行驶的速度上限v2。本实施例中,为尽可能保障水平运输编组的安全,设定安全距离l1的取值为水平运输编组在最大速度v
max
下的最远制动距离l
1max
,设定安全时间t的取值为10s。作为其他实施方式,也可通过不同速度与制动距离之间的数学关系,采用水平运输编组的实时速度计算设定安全距离l1。
[0054]
在水平运输编组沿直线路径行驶时,若遇到物体遮挡,影响雷达模块对主要监控区域内的环境进行感知,进而导致主要监控区域的长度无法达到l
max
,则按照水平运输编组转弯时的处理方式,对水平运输编组的速度进行限制。
[0055]
此外,在水平运输编组行驶的过程中,雷达模块对主要监控区域内的环境进行检测,得到环境感知信息发送至边缘计算器,边缘计算器对环境感知信息进行综合处理后,输出在水平运输编组行进方向上且处于主要监控区域内的最近的障碍物与机车之间的距离,并将其发送至车辆控制单元。
[0056]
为提高处理效率,降低边缘计算器的数据处理压力,边缘计算器从车辆控制单元
获取水平运输编组的行进方向,然后只对处于该行进方向上主要监控区域内的环境感知信息进行处理。
[0057]
车辆控制单元根据水平运输编组与障碍物之间的距离,对水平运输编组的运行做如下控制:
[0058]
如图6所示,若水平运输编组与障碍物之间的距离等于预警距离l3,车辆控制单元通过蜂鸣器报警的方式对驾驶员进行报警。预警距离l3根据公式(3)进行计算,此时设定安全时间t的取值为n1。
[0059]
若水平运输编组与障碍物之间的距离等于警告距离l4,车辆控制单元通过蜂鸣器报警的方式对驾驶员进行报警,并控制车辆喇叭鸣叫提醒周边人员。警告距离l4根据公式(3)进行计算,此时设定安全时间t的取值为n2。
[0060]
若水平运输编组与障碍物之间的距离等于急停距离l5时,车辆控制单元通过蜂鸣器报警的方式提醒驾驶员,并通过车辆喇叭鸣叫的方式提醒周边人员,还控制车辆进行急停操作。急停距离l5根据公式(3)进行计算,此时设定安全时间t的取值为n3。
[0061]
本实施例中,n1>n2>n3。具体的,n1的取值为8秒,n2的取值为6秒,n3的取值为2秒。
[0062]
采用本发明,可以在水平运输编组转弯运行,或者雷达模块被遮挡时,根据主要监控区域的长度,及时对车速进行限制,从而保障机车和人员安全。此外,在机车运行过程中,还根据水平运输编组与障碍物之间的距离,进行分级预警,做出蜂鸣器报警、喇叭报警和急停等操作,从而对驾驶员、周边施工人员进行报警,实现水平运输编组运行的安全控制,能够有效地避免安全事故发生。
[0063]
机车实施例:
[0064]
本发明提供一种水平运输机车,采用系统实施例中的水平运输机车的主动安全系统,关于该系统的实现,在系统实施例中已经介绍的清楚明白,此处不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1