一种列车精准制动停车过程控制方法
1.本发明涉及轨道交通技术领域,具体是一种列车精准制动停车过程控制方法。
背景技术:
2.目前轨道车辆进站停车主要依靠驾驶员控制,或者通过ato系统通过利用列车实时运行状态下相应的牵引和制动指令信息来确保列车在最优的状态下运行,最终保证列车能够在进站给定的停车点进行平稳、精确地停车。但在实际停站过程中存在轨道车辆位置、速度信息获取精确度不足的问题,导致定位准确性不高,停车偏差时有发生,有时甚至会超过2米,为铁路运营造成了安全隐患。
技术实现要素:
3.针对上述现有技术中的缺陷和不足,本发明提供一种列车精准制动停车过程控制方法,实现轨道车辆精准进站停车。
4.为实现上述目的,本发明提供一种列车精准制动停车过程控制方法,在车站内布设若干uwb基站,在列车上搭载有定位终端,所述定位终端上具有ldv测速系统、uwb通讯系统与mems系统;
5.所述列车精准制动停车过程控制方法包括如下步骤:
6.步骤1,当列车与车站距离为x时,进行实验性制动,得到最大制动加速度,并基于最大制动加速度确定模拟制动距离;
7.步骤2,基于uwb通讯系统与mems系统对列车进行联合定位,得到列车与车站之间的测量距离,并根据uwb通讯系统的采样频率实时更新测量距离;
8.步骤3,当测量距离小于或等于模拟制动距离+冗余滑行制动距离时,启动制动;
9.步骤4,在制动过程中,根据ldv测速系统的采样频率实时测量列车的加速度,并根据加速度得到实时制动距离;
10.步骤5,将实时制动距离与同时刻的测量距离进行比对,当实时制动距离大于同时刻的测量距离时解除制动,直至实时制动距离大于或等于同时刻的测量距离时再次启动制动;
11.步骤6,重复步骤5直至列车完成停靠。
12.在其中一个实施例,步骤2中,所述基于uwb通讯系统与mems系统对列车进行联合定位,得到列车与车站之间的测量距离,具体包括:
13.步骤2.1,对uwb通讯系统接收各uwb基站发出的uwb信息进行测量,得到列车当前时刻与各uwb基站的距离信息;
14.步骤2.2,mems系统获取列车当前时刻与各uwb基站的距离信息,并根据车站的区域补偿信息对各距离信息进行修正,得到修正后的距离信息所构成的实时位置信息,并通过实时位置信息与轨道建设方案对比,得到列车的实时方向角信息;
15.步骤2.3,设定门限阈值,将实时位置信息中的所有距离信息分别与门限阈值进行
比较,筛选出高误差信息,并对其进行低权重赋值后,将实时位置信息中所有的距离信息进行加权最小二乘法得到列车高精度的实时定位信息;
16.步骤2.4,基于当前时刻的实时定位信息与已标定的车站停车标位置信息,即能得到当前时刻的测量距离。
17.在其中一个实施例,步骤2.2中,所述车站的区域补偿信息的获取过程为:在车站布设uwb基站时,对每一uwb基站进行如下处理:
18.步骤2.2.1,控制一列搭载有uwb通讯系统的列车在车轨上运行,基于各uwb基站对uwb通讯系统发出的uwb信息进行测量,得到列车当前时刻与各uwb基站的粗测距离信息,并实际测量得到列车当前时刻与各uwb基站的实测距离信息,将粗测距离信息与实测距离信息差分即得到该粗测距离信息对应的区域补偿信息;
19.步骤2.2.2,在uwb信息的每个采样时刻进行步骤1.2.1,即能得到粗测距离信息与区域补偿信息一一对应的区域补偿信息对照表。
20.在其中一个实施例,步骤2.3中,所述将实时位置信息中的所有距离信息分别与门限阈值进行比较,筛选出高误差信息,并对其进行低权重赋值后,将实时位置信息中所有的距离信息进行加权最小二乘法得到列车高精度的实时定位信息,具体为:
21.将实时位置信息中的所有距离信息分别与门限阈值进行比较,将大于或等于门限阈值的距离信息的权重设置为1,将小于门限阈值的距离信息的权重设置为0,并根据所设置的权重将实时位置信息中所有的距离信息进行加权最小二乘法得到列车高精度的实时定位信息。
22.在其中一个实施例,步骤1中,所述进行实验性制动,得到最大制动加速度,具体为:
23.对列车进行1秒的最大功率制动,通过ldv测速系统测得列车的速度变化曲线,并对速度变化曲线进行线性拟合从而获取列车的最大制动加速度。
24.在其中一个实施例,步骤1中,所述模拟制动距离为:
[0025]v2
=2ax
[0026]
式中,v为ldv测速系统测得的列车瞬时速度,a为最大制动加速度,x为模拟制动距离。
[0027]
在其中一个实施例,步骤1中,所述当列车与车站距离为x时具体为:当列车与车站距离为25~30km时。
[0028]
在其中一个实施例,步骤3中,所述冗余滑行制动距离为3km。
[0029]
相较于现有技术,本发明具有以下优点:
[0030]
1、本发明只需要在进站时接收外界信息,可靠性更高;
[0031]
2、本发明减少了差分基站的布设,有效地降低了定位成本;
[0032]
2、本发明实现了现有轨道车辆进站精准停靠的无人化控制。
附图说明
[0033]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图示出的结构获得其他的附图。
[0034]
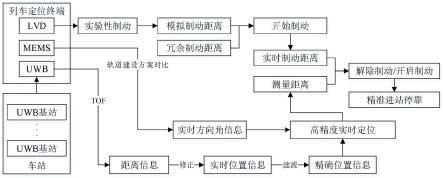
图1为本发明实施例中列车精准制动停车过程控制方法的流程图。
[0035]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0038]
在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0039]
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0040]
本实施例公开了一种列车精准制动停车过程控制方法,该方法的前提则是在车站内布设若干uwb基站,各uwb基站呈阵列分布在车站内,且定义uwb基站在车站这一复杂环境下的有效覆盖范围为其开阔条件下的0.75倍,保障需要定位的区域均被有效覆盖,且各uwb基站位置信息均已进行标定。另外,还需在列车上搭载定位终端,该定位终端上具有ldv(laser doppler velocimetry,激光多普勒测速仪)测速系统、uwb(ultrawide band,超管带无线载波通信)通讯系统与mems系统(micro-electro-mechanical system,微机电系统),其中,mems系统为六轴mems-imu惯导。
[0041]
参考图1,本实施例中的列车精准制动停车过程控制方法具体包括如下步骤1-步骤6。
[0042]
步骤1,当列车与车站距离为25~30km时,进行实验性制动,得到最大制动加速度,并基于最大制动加速度确定模拟制动距离。
[0043]
步骤2,基于uwb通讯系统与mems系统对列车进行联合定位,得到列车与车站之间的测量距离,并根据uwb通讯系统的采样频率实时更新测量距离。其具体实施过程为:
[0044]
步骤3,当测量距离小于或等于模拟制动距离+冗余滑行制动距离时,启动制动,本实施例中,将冗余滑行制动距离设置为3km,即测得列车与车站之间的距离为x+3km时启动制动;
[0045]
步骤4,在制动过程中,根据ldv测速系统的采样频率实时测量列车的加速度,并根据加速度得到实时制动距离,其中,加速度可通过对ldv测速系统测得的速度进行微分得到;
[0046]
步骤5,将实时制动距离与同时刻的测量距离进行比对,当实时制动距离大于同时刻的测量距离时解除制动,直至实时制动距离大于或等于同时刻的测量距离时再次启动制
动;
[0047]
步骤6,重复步骤5直至列车完成精准进站停靠。
[0048]
在具体实施过程中,最大制动加速度与模拟制动距离的获取过程具体为:
[0049]
对列车进行1秒的最大功率制动,通过ldv测速系统测得列车的速度变化曲线,并对速度变化曲线进行线性拟合从而获取列车的最大制动加速度a;
[0050]
基于最大制动加速度确定模拟制动距离,为:
[0051]v2
=2ax
[0052]
式中,v为ldv测速系统测得的列车瞬时速度,a为最大制动加速度,x为模拟制动距离。
[0053]
在步骤2中,基于uwb通讯系统与mems系统对列车进行联合定位,得到列车与车站之间的测量距离的具体实施过程为:
[0054]
步骤2.1,基于tof(time offlight,飞行时间法)对各uwb基站发送至uwb通讯系统发出的uwb信息进行测量,得到列车当前时刻与各uwb基站的距离信息;
[0055]
步骤2.2,mems系统获取列车当前时刻与各uwb基站的距离信息,并根据车站的区域补偿信息对各距离信息进行修正,即将tof法测得的距离信息与标定好的区域补偿信息做差分,得到修正后的距离信息,进而得到由若干修正后的距离信息所构成的实时位置信息,并通过实时位置信息与轨道建设方案对比,得到列车的实时方向角信息。
[0056]
步骤2.3,设定门限阈值,将实时位置信息中的所有距离信息分别与门限阈值进行比较,筛选出高误差信息,并对其进行低权重赋值后,将实时位置信息中所有的距离信息进行加权最小二乘法得到列车高精度的实时定位信息,即通过滤波优化系统定位精度,将常规的定位精度优化到10cm以内,用以完成轨道车辆精准停靠。具体地:
[0057]
首先可以根据tof法的测量值建立双曲线模型,为:
[0058][0059]
式中,ri为tof法测得的距离信息,(x,y)为列车的位置信息,(xi,yi)为第i个uwb基站的位置信息,ei为误差矩阵,即步骤a2中的区域补偿信息;
[0060]
对双曲线模型进行线性化处理,可以得到线性方程,为:
[0061]
y=a
·
x+ei[0062]
式中,y为由tof法测得的所有距离信息所组成的观测向量,x为未知向量,a为系数矩阵,其中:
[0063][0064]
[0065][0066][0067]
式中,为tof法测得的列车与第n个uwb基站之间的距离信息,为第n个uwb基站的位置矢量,为列车的位置矢量,为列车位置初值与第n个uwb基站之间的单位矢量,c为光速,δtk为钟差,为tof法测得的列车与第n个uwb基站之间的距离信息对应的区域补偿信息;
[0068]
由于系数矩阵a已知,误差矩阵ei可标定获取,而本实施例设置了门限阈值,从而有:
[0069]
x=(a
twt
a)-1atwty[0070]
式中,w为赋予各基站的伪距加权矩阵,即:
[0071][0072]
式中,ωi为基于所获得的门限阈值与补偿后tof信息作对比而得出,超出门限的权重设为0,阈值内设为1;
[0073][0074]
式中,∑
x
为uwb观测数据系统方差,为uwb观测数据系统方差的中间参数;
[0075]
可以得到:
[0076][0077]
通过迭代获取精确地位置信息;
[0078]
步骤2.4,基于当前时刻的实时定位信息与已标定的车站停车标位置信息,即能得到当前时刻的测量距离。
[0079]
本实施例中,车站的区域补偿信息的获取过程为:在车站布设uwb基站时,对每一uwb基站进行如下处理:
[0080]
步骤2.2.1,控制一列搭载有uwb通讯系统的列车在车轨上运行,基于各uwb基站对uwb通讯系统发出的uwb信息进行测量,得到列车当前时刻与各uwb基站的粗测距离信息,并实际测量得到列车当前时刻与各uwb基站的实测距离信息,将粗测距离信息与实测距离信息差分即得到该粗测距离信息对应的区域补偿信息;
[0081]
步骤2.2.2,在uwb信息的每个采样时刻进行步骤1.2.1,即能得到粗测距离信息与区域补偿信息一一对应的区域补偿信息对照表。
[0082]
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本
发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1