一种井下电机车运输方法及系统与流程
本技术涉及井下电机车运输的,尤其是涉及一种井下电机车运输方法及系统。
背景技术:
1、目前矿山现场运输作业流程为:矿石落到堑沟内,采场内矿石由装载机搬运至各采场溜井。矿石倒入各分层放矿溜井,放矿溜井的矿石通过振动放矿机装入矿车。由电机车牵引矿车至矿石主溜井卸车,破碎后经主溜井提升至地表。由于放矿溜井有多个,因此从放矿溜井至主溜井的运输轨道也相应有多个;在某一运输轨道上的电机车出现故障后,共用该运输轨道的电机车会在工作人员的操作下停止运行,直至出现故障的电机车恢复动作,后续电机车才会动作,因此导致整体矿石运输效率较低。
技术实现思路
1、为了提高整体矿石运输的效率,本技术提供一种井下电机车运输方法及系统。
2、第一方面,本技术提供的一种井下电机车运输方法,采用如下技术方案:
3、一种井下电机车运输方法,以电机车侧为执行主体,包括:
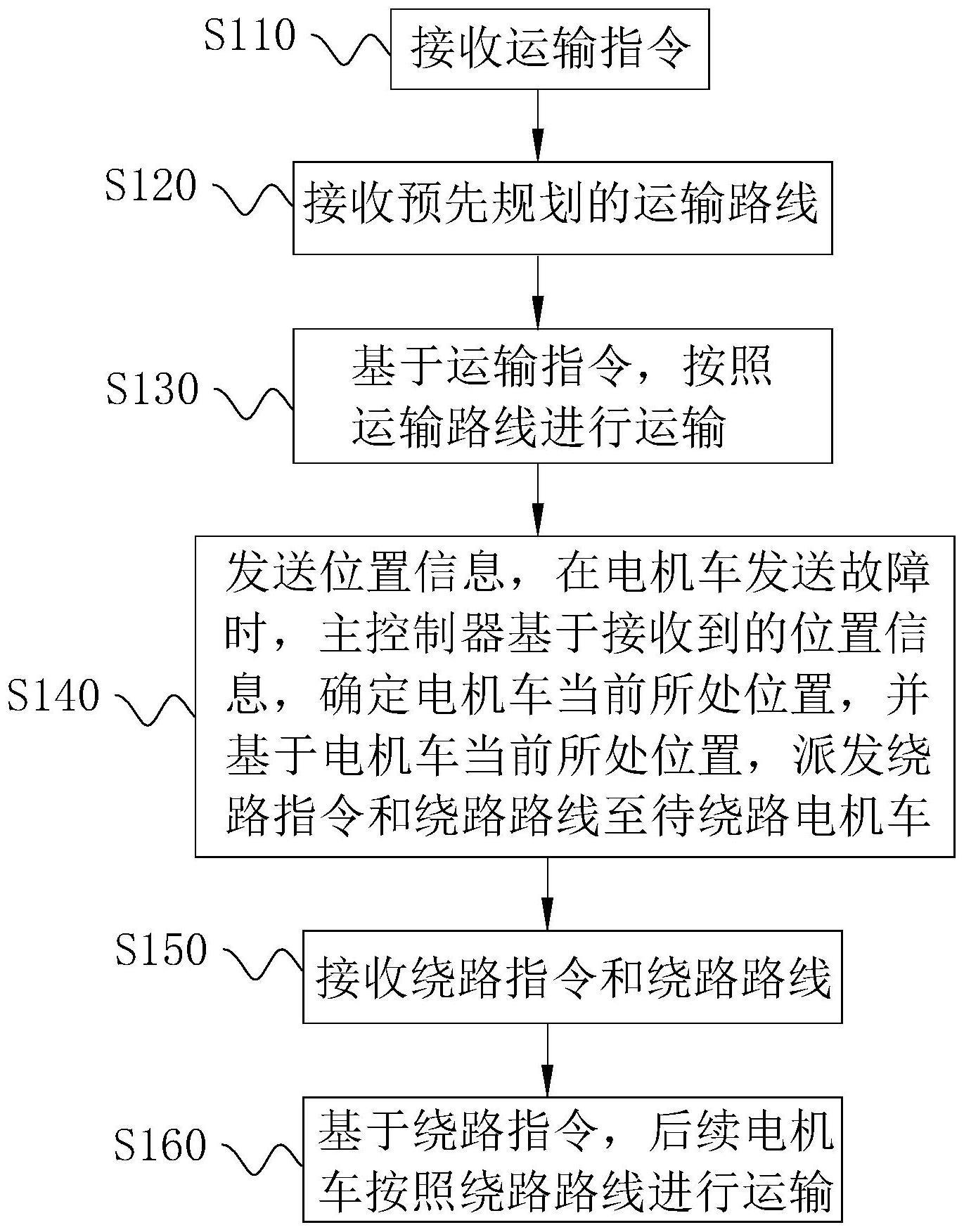
4、接收运输指令;
5、接收预先规划的运输路线;
6、基于所述运输指令,按照所述运输路线进行运输;
7、发送位置信息;在电机车发生故障时,主控制器基于接收到的所述位置信息,确定所述电机车当前所处位置,并基于所述电机车当前所处位置,派发绕路指令和绕路路线至待绕路电机车,其中,所述待绕路电机车为后续需要经过所述电机车当前所处位置的电机车;
8、接收所述绕路指令和所述绕路路线;
9、基于所述绕路指令,所述待绕路电机车按照所述绕路路线进行运输。
10、通过采用上述技术方案,在电机车运输时,电机车接收到主控制器发送的运输指令和派发的运输路线,而后按照运输路线自动进行运输,一方面可以减轻人工成本,另一方面可以减少事故的发生,提高运输安全性;在电机车运输过程中,会发送位置信息至主控制器,主控制器接收位置信息,并在电机车发生故障时,确定该电机车当前所处的位置,而后对待绕路电机车派发绕路指令和绕路路线,待绕路电机车接收到绕路指令后,按照规划好的绕路路线进行运输;由于不需要待绕路电机车停机,因此提高了整体矿石运输的效率。
11、可选的,所述接收预先规划的运输路线包括:
12、所述主控制器基于预先构建的运输路线图,获取每条轨道的编号;
13、在所述主控制器获取运输路线后,派发运输路线至对应的电机车;其中,所述运输路线由轨道编号组合而成。
14、通过采用上述技术方案,主控制构建运输路线图后,根据管理人员输入的每条轨道的编号,从而获取每条轨道的编号;而后根据管理人员对轨道编号的组合,从而获取每台电机车对应的运输路线,进而将该运输路线派发至对应的电机车,从而可以使得电机车根据运输路线自动行驶;采用该方式,组合方式明确且多种,可以应对多种运输情况。
15、可选的,判断所述电机车发生故障的步骤包括:
16、采集电机车前后的第一图像信息;
17、发送所述第一图像信息;
18、所述主控制器接收所述第一图像信息,判断所述第一图像信息中包含的环境信息是否为放矿溜井处的环境信息,若否,则判断在预设的时长阈值内,所述第一图像信息中包含的环境信息是否改变,若否,则确定所述电机车发生故障。
19、通过采用上述技术方案,主控制器接收来自电机车采集的第一图像信息,并根据第一图像信息中包含的环境信息判断是否是放矿溜井处的环境信息,从而判断电机车是否处于放矿溜井处,若是,则说明虽然电机车停止,但是电机车此时处于裝矿中,所以并不是故障;若否,则再判断在时长阈值内,第一图像信息中包含的环境信息是否发送改变,因为有可能是电机车遇到闸机或者红绿灯,短暂的停留,所以若是环境信息一直未发生改变,则确定电机车故障;通过该方式判断电机车是否故障,较为精确。
20、可选的,所述确定所述电机车发生故障之后的步骤包括:
21、所述主控制器判断故障所属的故障类型,其中,故障类型包括技术类故障和非技术类故障;
22、若故障属于技术类故障,则所述主控制器调取预设的维修数据库中的维修人员信息,并判断维修人员中空闲人员的数量是否大于1,若是,则派发维修指令至评分高且空闲的维修人员,若否,则直接派发维修指令至空闲的维修人员;
23、若故障属于非技术类故障,则所述主控制器调取预设的工作信息库中的井下工作人员信息,并判断井下工作人员中空闲人员的数量是否大于1,若是,则基于井下工作人员的位置信息和所述电机车当前所处位置,派发维修指令至最近的井下工作人员,若否,则直接派发维修指令至空闲的井下工作人员。
24、通过采用上述技术方案,通过将故障进行类型的划分,从而使得技术类故障由专业的维修人员进行维修,非技术类故障则可以由井下工作人员进行处理,进行资源合理化应用,从而提高了维修效率。
25、可选的,所述派发绕路线路之前的步骤包括:
26、所述主控制器判断所述绕路线路上的电机车的数量是否在预设的数量阈值以上,若是,则动态调整绕路线路,若否,则调取预设的绕路数据库中相应的绕路线路。
27、通过采用上述技术方案,若在绕路线路上的电机车数量较多的情况下,待绕路的电机车绕路至该线路上,则运输速度非常有可能降低,也容易引发引发运输事故,降低了运输效率;因此需要动态调整绕路线路,若是在绕路线路上电机车数量较少的情况下,待绕路的电机车可以绕路至该线路上。
28、可选的,所述运输方法还包括:
29、判断电机车是否即将驶入弯道或交叉口,若是,则播报安全提醒信息。
30、通过采用上述技术方案,电机车通过在驶入弯道或交叉口处时,播报安全提醒信息,从而可以提醒处于弯道或交叉口处的井下工作人员,以避免安全事故发生。
31、可选的,所述判断是否即将驶入弯道或交叉口包括:
32、获取电机车的位置至弯道或交叉口的位置之间的距离;
33、判断所述距离是否小于预设的安全距离,若是,则确定电机车即将驶入弯道或交叉口;
34、和/或,
35、获取电机车运输时的速度信息;
36、判断所述速度信息中速度值是否小于正常行驶的速度值,若是,则获取第二图像信息;
37、判断所述第二图像信息中是否出现弯道或交叉口特征,若是,则确定电机车即将驶入弯道或交叉口。
38、第二方面,本技术提供了一种井下电机车运输系统,采用如下技术方案:
39、一种井下电机车运输系统,包括:
40、电机车;
41、子控制器,安装于所述电机车内,用于控制所述电机车的行驶;
42、主控制器,安装于主控室内,与所述子控制器无线连接,用于派发指令和路线;
43、其中,所述子控制器包括:
44、指令接收模块,用于接收运输指令和绕路指令;
45、路线接收模块,用于接收预先规划的运输路线和绕路路线;
46、控制模块,基于所述运输指令,控制所述电机车按照所述运输路线进行运输,基于所述绕路指令,控制待绕路电机车按照所述绕路路线进行运输;
47、位置发送模块,用于发送位置信息;
48、所述主控制器包括:
49、位置接收模块,用于接收所述位置信息,并在电机车发生故障时,确定所述电机车当前所处位置;
50、指令派发模块,用于派发所述绕路指令;
51、绕路路线派发模块,用于派发所述绕路路线至所述待绕路电机车,其中,所述待绕路电机车为后续需要经过所述电机车当前所处位置的电机车。
52、通过采用上述技术方案,在电机车运输时,指令接收模块接收到主控制器发送的运输指令,路线接收模块接收到派发的运输路线,而后控制模块控制电机车按照运输路线自动进行运输,一方面可以减轻人工成本,另一方面可以减少事故的发生,提高运输安全性;在电机车运输过程中,位置发送模块会发送位置信息至位置接收模块,位置接收模块在电机车发生故障时,确定该电机车当前所处的位置,而后指令派发模块派发绕路指令至指令接收模块,绕路路线派发模块派发绕路路线至路线接收模块,使得控制模块控制待绕路电机车按照规划好的绕路路线进行运输;由于不需要后续电机车停机,因此提高了整体矿石运输的效率。
53、综上所述,本技术存在至少以下有益效果:
54、1、在电机车发生故障时,后续电机车接收绕路指令和绕路路线,按照绕路路线运输,从而不需要停机,因此提高了整体矿石运输的效率。
55、2、通过判断故障所属的故障类型,从而根据故障类型派发维修指令至不同的人员,从而使得资源合理化应用,能够提高维修效率。
56、3、通过根据绕路路线上电机车的数量,判断是动态调整绕路线路,还是根据预设的绕路线路,从而可以提高运输效率,并且减少运输事故的发生。
- 还没有人留言评论。精彩留言会获得点赞!