有轨台车系统的制作方法
本发明的一个方面涉及有轨台车系统。
背景技术:
1、已知一种在轨道上行驶来搬送物品的行驶车。在行驶车上设有对在轨道上行驶时可能成为障碍的障碍物进行检测的障碍物检测传感器,并存在基于障碍物检测传感器的检测有无结果来控制行驶车的行驶的情况。但是,为了维持行驶车的妥当行驶,需要定期地检查障碍物检测传感器是否在妥当地工作。例如,在专利文献1中,公开了一种使自动驾驶中的行驶车移动到起始位置、并在起始位置处自动执行障碍物检测传感器的检查的自动工作确认装置。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开平10-124146号公报
技术实现思路
1、上述专利文献1的自动工作确认装置以进行在地上行驶的台车上所设的障碍物检测部的检查为目的,并没有设想对在轨道上行驶的台车上所设的障碍物检测部进行检查。
2、因此,本发明的一个方面的目的在于提供一种能够自动地进行在轨道上行驶的台车上所设的障碍物检测部的动作确认的有轨台车系统。
3、本发明的一个方面的有轨台车系统中,设有对位于行驶方向的前方的障碍物进行检测的障碍物检测部的多台台车沿着轨道行驶,上述有轨台车系统具备:被检测部,上述被检测部配置在位于规定位置的台车的前方,通过障碍物检测部而被检测;和控制器,上述控制器基于由障碍物检测部得到的针对被检测部的检测结果,判定障碍物检测部的状态,被检测部以在确认障碍物检测部的动作的检查时进入台车的行驶空间、并且在台车从被检测部的进入位置通过的通过时从台车的行驶空间退避的方式移动自如地设置。
4、在该结构中,在确认位于规定位置的台车的障碍物检测部的状态时(检查时),使被检测部进入台车的行驶空间的前方,并基于此时的由障碍物检测部得到的针对被检测部的检测结果判定障碍物检测部的状态。另外,在台车从被检测部的进入位置通过时(通过时),使被检测部从台车的行驶空间退避,因此不会妨碍台车的行驶。由此,能够自动地进行在轨道上行驶的台车上所设的障碍物检测部的动作确认。
5、在本发明的一个方面的有轨台车系统中,也可以是,障碍物检测部是受光器,被检测部是安装于板状部件的投光器。在该结构中,能够自动地进行台车上所设的受光器的动作确认。
6、在本发明的一个方面的有轨台车系统中,也可以是,轨道沿着轨道的延伸方向形成有相对于外部空间划分出的内部空间,台车具有在内部空间行驶的行驶部,障碍物检测部安装于行驶部,投光器在内部空间与外部空间之间移动自如地设置,且以在检查时进入内部空间、在通过时退避到外部空间的方式移动自如地设置。在该结构中,能够自动地进行在轨道的内部空间内行驶的行驶部上所安装的投光器的动作确认。
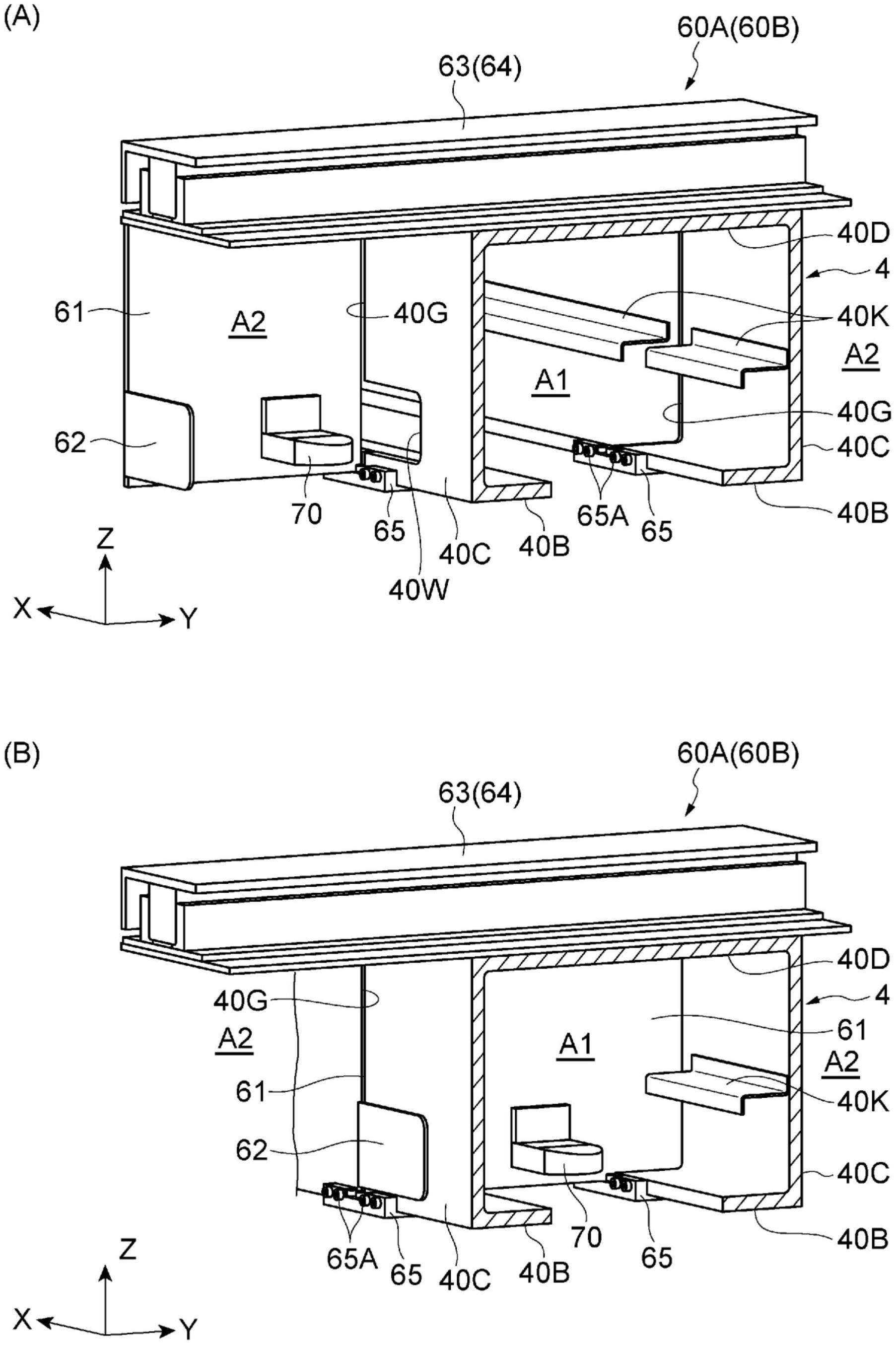
7、在本发明的一个方面的有轨台车系统中,也可以是,在轨道上形成有允许投光器及板状部件在内部空间与外部空间之间移动的缺口部,在板状部件上形成有盖部,该盖部在投光器进入内部空间时将缺口部中供投光器通过的区域覆盖。在该结构中,在投光器进入内部空间时缺口部被盖部覆盖,防止干扰光等从外部空间侵入到内部空间。由此,能够不受干扰光的影响而更加可靠地进行投光器的动作确认。
8、在本发明的一个方面的有轨台车系统中,也可以是,台车具备使位于轨道的后方的台车检测本台车的存在的后方投光器,有轨台车系统还具备设在位于规定位置的台车的后方并且检测从后方投光器投射的光的投光器检测部,投光器检测部以在确认后方投光器的动作的检查时进入台车的行驶空间、并且在台车从投光器检测部的进入位置通过的通过时从台车的行驶空间退避的方式移动自如地设置,控制器基于由投光器检测部得到的检测结果,判定后方投光器的状态。在确认位于规定位置的台车的后方投光器的状态时(检查时),使投光器检测部出现在台车的后方,并基于此时的由投光器检测部得到的检测结果判定后方投光器的状态。由此,能够自动地进行在轨道上行驶的台车上所设的后方投光器的动作确认。
9、在本发明的一个方面的有轨台车系统中,也可以是,障碍物检测部构成为包括受光器及投光器,被检测部是能够反射从投光器投射的光的反射部件。在该结构中,能够自动地进行台车上所设的投光器及受光器的动作确认。
10、在本发明的一个方面的有轨台车系统中,也可以是,反射部件相对于以使台车能够沿行驶方向通过的方式包围台车的行驶空间的框状主体部移动自如地安装,反射部件以在检查时进入台车的行驶空间、在通过时从台车的行驶空间退避的方式移动自如地设置。在该结构中,能够使反射部件从台车的行驶空间退避,使得在台车通过时不会妨碍台车行驶。
11、发明效果
12、根据本发明的一个方面,能够自动地进行在轨道上行驶的台车上所设的障碍物检测部的动作确认。
技术特征:
1.一种有轨台车系统,在所述有轨台车系统中,设有对位于行驶方向的前方的障碍物进行检测的障碍物检测部的多台台车沿着轨道行驶,所述有轨台车系统具备:
2.如权利要求1所述的有轨台车系统,其中,
3.如权利要求2所述的有轨台车系统,其中,
4.如权利要求3所述的有轨台车系统,其中,
5.如权利要求1~4中任一项所述的有轨台车系统,其中,
6.如权利要求1所述的有轨台车系统,其中,
7.如权利要求6所述的有轨台车系统,其中,
技术总结
有轨台车系统(1)具备:被检测部(70、84、85),该被检测部配置在位于规定位置(P1)的台车(6)的行驶方向(D1)上的前方,通过障碍物检测部(54A、34A、34B)而被检测;和控制器(90),该控制器基于由障碍物检测部(54A、34A、34B)得到的针对被检测部(70、84、85)的检测结果,判定障碍物检测部(54A、34A、34B)的状态。被检测部(70、84、85)以在确认障碍物检测部(54A、34A、34B)的动作的检查时进入台车(6)的行驶空间、并且在台车(6)从被检测部(70、84、85)的进入位置通过的通过时从台车(6)的行驶空间退避的方式移动自如地设置。
技术研发人员:小川佳祐
受保护的技术使用者:村田机械株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!