具有轮轴控制装置的轨道车辆底盘的制作方法
本发明涉及根据权利要求1的前序部分的轨道车辆的底盘和根据权利要求14的前序部分的用于控制这种底盘的轮轴的装置。
背景技术:
1、在轨道车辆中,车轮的轮廓形状通常会导致底盘的轮对在行驶过程中以正弦的方式运行。如果轮轴没有牢固地连接到底盘框架上,轮对在高速行驶时将运行不稳定。
2、de 10 2017 002 926 a1公开了一种用于轨道车辆的底盘的主动车轮或轮对控制的液压致动器单元。这种致动器单元的独特之处在于其圆柱形的基本形状,由此可以直接替换具有上述致动器的常规的轴转向轴承。此外,该致动器的独特之处在于其没有基础静刚度。因此,不需要消耗能量或力来操作致动器。然而,不存在的基础刚度在由于泄漏而导致完全的机油损失的故障的情况下会产生负面影响。在这种情况下,轨道车辆的轮轴不再牢固地连接到底盘,因此可能发生轮对的不稳定运行。
3、此外,已知用于对轮轴与底盘的耦合进行阻尼的弹性轴承或液压衬套。然而,它们本身不是主动可调节的,并且还具有基础静刚度,因此即使在液压衬套发生机油损失的情况下,仍提供一定的残余刚度,从而保持安全功能。
4、总体而言,主动轮对控制系统在某些故障情况下,尤其是在较高的行驶速度下,不能提供足够的行驶安全性。
技术实现思路
1、因此,本发明旨在提供一种克服上述缺点的主动轮或轮对控制。
2、根据本发明,所述目的通过具有权利要求1的特征的底盘和具有权利要求14的特征的装置来实现。本发明的有利实施例源自从属权利要求和以下描述。
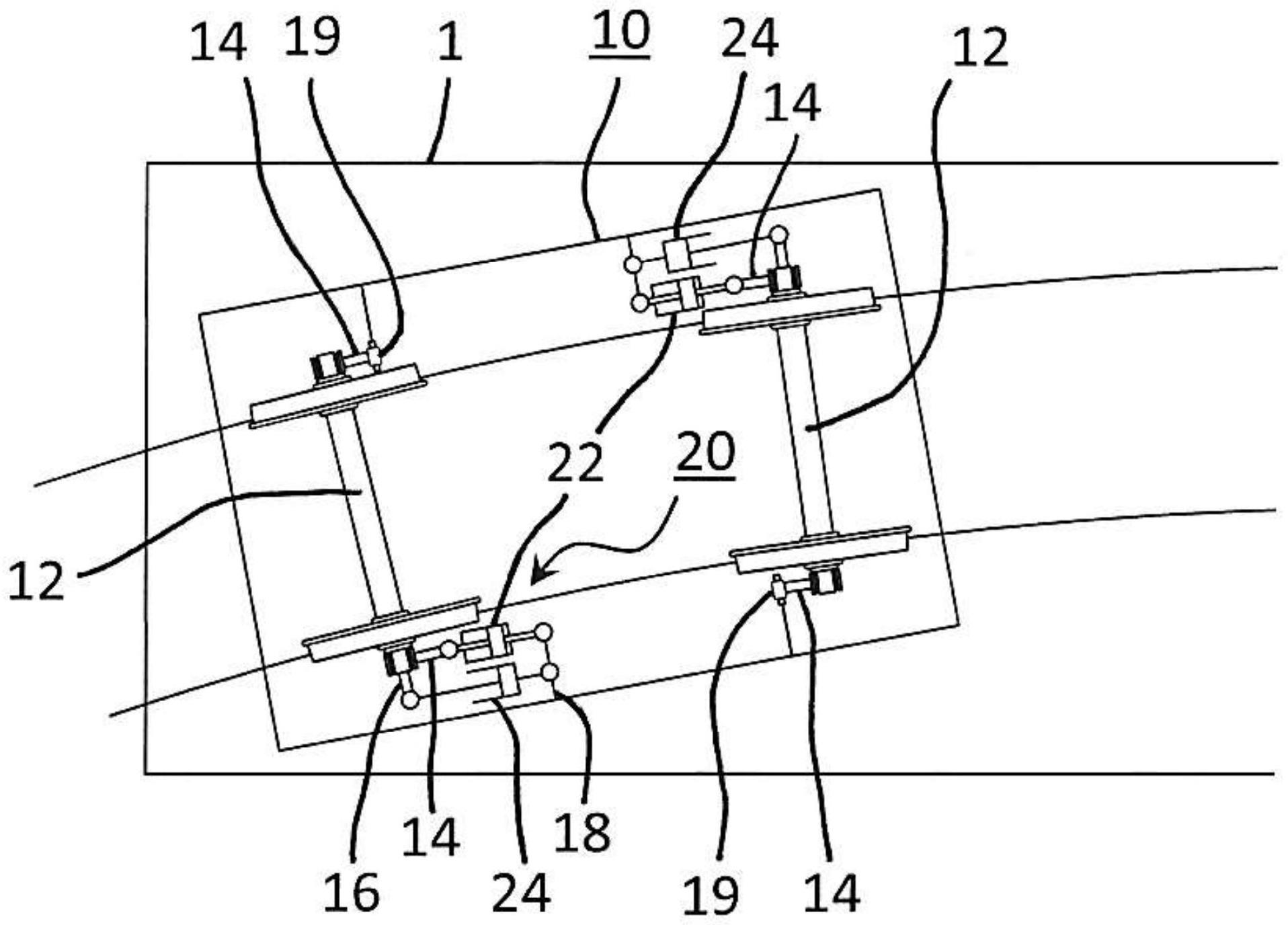
3、因此本发明一方面提出一种具有轮轴和用于控制所述轮轴的装置的轨道车辆的底盘,其中所述装置包括流体致动器,所述流体致动器将所述轮轴与所述底盘耦合,并且通过所述流体致动器可以调节所述轮轴的转向角。所述轮轴可以是底盘的轮对的一部分,也可以代表轮对本身。
4、根据本发明,所述底盘包括阻尼装置,所述阻尼装置以平行于所述致动器的方式将所述轮轴与所述底盘耦合。术语“平行(parallel)”不应理解为几何意义上的,而是应理解为效果技术方面的。根据本发明的阻尼装置的独特之处在于,其具有取决于频率的动刚度或等效刚度,但没有静刚度。换句话说,所述阻尼装置具有取决于激励或振动频率的刚度(刚度特别地随着激励频率增加),而在静态情况下没有基础刚度,因此在这种情况下不需要施加力。这意味着用于调节所述轮轴的转向角的所述致动器不必对抗所述阻尼装置的基础静刚度,而是仅需要对抗其动刚度,这导致用于定位轮轴的能量消耗明显降低。
5、根据本发明的平行布置的致动器和阻尼装置的允许在高速时也使用主动轮对控制,因为这保证了即使在故障情况下的驾驶安全。这里可以使用从现有技术已知的致动器,例如de 10 2017 002 926 a1,而不必通过复杂的改造使得轮对控制系统安全。
6、致动器可以是气动或液压致动器,其中优选地为液压致动器。
7、特征“所述阻尼装置的等效刚度取决于频率”将被广义解释,而不限于特定形式的相关性。在最简单的情况下,这可以简单地表示在零激励频率下的刚度(静态情况)也是零(基础刚度消失),而在零以上频率下的刚度取未消失的值。这例如可以是常数值。也可以考虑取决于激励频率的刚度的线性或非线性的曲线。然而,等效刚度优选地随着激励频率而增加,特别是线性地增加,以在伴随较高激励频率的高行驶速度下提供足够的刚度。
8、在可能的实施例中规定,所述致动器具有第一操作模式,在所述第一操作模式中所述致动器用作具有取决于频率的动刚度的被动阻尼元件,其中所述致动器特别地不具有静刚度。在所述第一操作模式中,所述致动器仅用于所述轮轴的被动阻尼,其中阻尼作用平行于所述阻尼装置提供。所述致动器和所述阻尼装置的刚度在此有利地相加。
9、在第二操作模式中,所述致动器用作执行机构,通过所述致动器,所述轮轴的转向角可主动调节。
10、可选地,所述致动器可以具有第三操作模式,在所述第三操作模式中所述致动器是固定的,特别是流体阻断的。例如,这可以在轨道车辆的有效牵引期间或在保持已移动的位置时使用。因此,在所述第三操作模式中,所述致动器特别地不可调节和/或不具有主要阻尼功能。
11、在另一个可能的实施例中规定,可以通过控制阀来选择或激活所述致动器的不同的操作模式。可通过所述控制阀在操作模式之间切换。所述控制阀可以是液压阀,例如方向阀或阀组件。
12、优选地,所述控制阀可通过控制单元切换。为此,所述控制单元可以优选地接收来自一个或多个传感器的信号,并基于这些信号将所述控制阀切换到对应于所述致动器的特定操作模式的特定的切换位置。
13、所述控制阀可将特别地连接到所述致动器的相应的流体室的所述致动器的流体输入口和输出口连接到流体源,即所述控制阀在所述流体源和所述致动器之间切换。所述流体源可以包括液压马达和一个或多个液压泵。在气动致动器的情况下,所述流体源可以包括一个或多个高压蓄能器。
14、在第二操作模式中,所述流体源优选地连接到所述致动器的流体输入口和输出口,从而通过相应的压力负载可以实现期望的所述致动器调节或定位。
15、在第一操作模式中,所述致动器的流体输入口和输出口可以与所述流体源分离和/或经由节流装置彼此连接。所述节流装置可以在第一操作模式中引起致动器的相应的阻尼作用,类似于液压减振器或减震器。
16、在可选的第三操作模式中,所述致动器的流体输入口和输出口可以与所述流体源分离并且彼此分离。
17、在另一个可能的实施例中规定,所述控制单元设置为在所述轨道车辆的直线行驶期间将所述控制阀切换到与所述第一操作模式相对应的切换位置。替代地或附加地,所述控制单元可以设置为在轨道车辆转弯行驶期间将所述控制阀切换到与所述第二操作模式相对应的切换位置。替代地或附加地,所述控制单元可以设置成当检测到限定状态时将所述控制阀切换到与所述第三操作模式对应的切换位置,所述限定状态可以例如是轨道车辆的牵引行驶或特定位置,但也可以是例如轨道车辆驾驶员或操作员的手动输入。
18、优选地,控制单元还设置成根据至少一个传感器的信号自动检测直线行驶或转弯行驶(或用于所述第三操作模式的上述限定的状态),并相应地切换和/或调节所述控制阀。
19、通常使用行程传感器、角度传感器、压力传感器、速度传感器、加速度传感器等的信号用于控制和/或调节所述控制阀或所述致动器(即一方面用于选择相应的操作模式,但也用于在第二操作模式中控制轮轴,即用于有针对性地控制致动器以定位轮轴)。例如,可以测量行驶速度或横向加速度。还可以设想通过测量底盘和可旋转地连接到所述底盘的车体或车身之间的纵向运动来确定牵引力。致动力可以通过所述致动器中的压力测量来检测。还可以设想,通过集成的压力传感器在提供给控制单元的阻尼装置中进行压力测量。如有必要,这可以与所述致动器中的相应压力测量相结合。
20、在另一个可能的实施例中规定,所述阻尼装置包括至少一个被动阻尼元件。所述阻尼元件优选地表示麦克斯韦体或麦克斯韦元件(即流变模型中的钩簧和阻尼器的串联)。优选地,整个阻尼装置代表麦克斯韦元件。
21、阻尼装置可以仅包括单个被动阻尼元件或串联的多个这种被动阻尼元件。在后一种情况下,在必要时可以激活或接通一个或多个阻尼元件,可能经由上述控制单元或经由单独的控制器。
22、在另一个可能的实施例中规定,所述阻尼装置的阻尼元件设计为流体的、特别是液压的减震器,并且优选地不包括机械弹簧元件。例如与常规的液压衬套相比,这种阻尼元件没有基础静刚度。
23、根据本发明,所述阻尼装置本身不具有基础静刚度。然而,可以设想将所述阻尼装置与液压衬套一起使用,例如将所述阻尼装置安装在底盘和/或轮轴上。在这种情况下,所述液压衬套可以设计成具有较低的残余刚度,这明显提高了其性能。
24、在另一个可能的实施例中规定,所述阻尼装置的阻尼元件永久地平行于所述致动器接通,亦即,其阻尼作用或刚度以平行于所述致动器的方式永久地影响所述轮轴。在所述致动器故障的情况下,例如泄漏,所述阻尼元件仍然可以为所述轮轴的轴承提供足够的刚度。只有在极不可能发生的致动器和平行的阻尼元件中的故障或泄漏(双重故障)的情况下将导致完全失效,然而这代表可接受的残余风险。
25、替代地或附加地,所述阻尼装置的阻尼元件可以根据需要接通。例如,这可以由特定条件(例如特定行驶速度)下的期望的阻尼行为产生。然而,优选地当检测所述到致动器的故障时,可以接通阻尼元件。这种故障特别在致动器泄漏时存在,所述泄露优选地通过借助于设置在所述致动器中的压力传感器检测的压降来记录。在这种泄漏情况下,单独的致动器不能提供足够的刚度来支承所述轮轴,这会导致特别是在高行驶速度下车轮运行不稳定。在这种情况下,接通的阻尼元件可以“接管”并提供足够的刚度。
26、在另一个可能的实施例中规定,所述致动器包括压力传感器,通过所述压力传感器可以检测所述致动器中的压降,其中可接通的阻尼元件优选地与致动器流体地(特别是液压地)耦合,使得其在压降中自动“激活”或接通。
27、在另一个可能的实施例中规定,所述阻尼装置以平行于所述致动器的方式将所述轮轴与所述底盘耦合,使得所述致动器和所述阻尼装置的刚度相加,其中由所述致动器和所述阻尼装置组成的系统优选地没有静刚度或基础刚度。所述致动器和所述阻尼装置的组合可以例如具有与常规液压衬套对应的动刚度(除了在液压衬套中大于零并且在本发明的装置中等于零的残余刚度)。
28、在另一个可能的实施例中规定,所述轮轴可枢转地安装在车轮悬架上,其中所述致动器和所述阻尼装置都耦合到所述车轮悬架上。优选地,所述致动器连接到所述车轮悬架的摇臂。替代地或附加地,所述阻尼装置可以连接到所述车轮悬架的轴箱盖。还可以设想,所述致动器和所述阻尼装置附接到共同的摇臂。
29、优选地,所述阻尼装置通过所述轴箱盖连接,所述轴箱盖又连接到摇臂。通过所述轴箱盖连接阻尼减震装置有助于现有底盘的后续改装。特别是在后续改装过程中,可以绕过整个摇臂或车轮悬架的调整。
30、在另一个可能的实施例中规定,所述阻尼装置的沿着阻尼方向延伸的纵向轴线与所述轮轴的旋转轴线(即沿着所述轮轴居中延伸的纵向轴线)相交。由于这种结构,通过阻尼装置不施加额外的力矩。特别地,如上所述的阻尼装置通过轴箱盖连接时,没有额外的力矩施加到摇臂上。
31、在另一个可能的实施例中规定,至少一个行程传感器或位置传感器集成到所述致动器和/或所述阻尼装置中,通过所述行程传感器或位置传感器优选地可确定所述致动器的顶出长度和/或所述阻尼装置的顶出长度和/或所述轮轴的位置(例如角度位置),并且可特别地提供给用于控制和/或调节轮轴位置的控制单元。主动轮对控制的行程传感器集成到所述阻尼装置中,这可以保护传感器免受轮对附近环境条件的影响。此外,所述行程传感器在传感器故障的情况下比集成到所述致动器中时更容易更换。这降低了维护成本并提高了可靠性。
32、在另一个可能的实施例中规定,所述致动器包括:附接到所述底盘的轴体、流体同步缸和耦合到所述轮轴的、根据所述流体同步缸的相对于所述轴体的运动可移动的壳体。优选地,所述同步缸设计或集成在轴体中,并且包括活塞,所述活塞在其两个平坦侧面中的每一个上均具有穿透所述轴体的活塞杆。穿过所述轴体的每个活塞杆特别地在其背离活塞表面的端部通过活塞弹簧元件连接到壳体。
33、因此,利用这种致动器可以通过调节同步缸或移动活塞杆来引起壳体的运动,所述运动又用于引起耦合到所述致动器的所述轮轴的枢转运动。在这种情况下,所述轴体通常附接在所述底盘上,使得所述壳体相对于所述轴体的相对运动可用于偏转所述轮轴的行程。
34、优选地,所述致动器对应于de 10 2017 002 926 a1中公开的致动器,其中描述的每个实施例都适用于本发明的致动器。de 10 2017 002 926 a1的关于致动器的可能的设计的教导完全结合在本公开中。
35、本发明还涉及一种用于控制根据本发明的底盘的轮轴的装置。所述装置包括根据本发明的流体致动器以及根据本发明的阻尼装置,其可以根据上述示例性实施例之一来设计。所述致动器在此一方面可以耦合到所述轮轴,另一方面可以耦合到所述底盘。阻尼装置可以与致动器平行地一方面耦合至轮轴,另一方面耦合至底盘。这显然导致与本发明的底盘相同的优点和特性,并因此省略重复描述。
36、所述阻尼装置可以表示与所述致动器分离的部件。然而也可以设想,所述阻尼装置集成到所述致动器中,或所述阻尼装置和所述致动器被集成到共同壳体中。这不仅涉及根据本发明的装置,而且总体上涉及根据本发明的底盘。这将导致更容易的组装或拆卸,例如从而简单地改装现有轨道车辆的底盘。
37、本发明还涉及一种具有根据本发明的底盘的轨道车辆。在此,优点和特性显然也与根据本发明的底盘相同,因此省略重复描述。
- 还没有人留言评论。精彩留言会获得点赞!