一种基于多源信息智能融合的地铁列车测速方法
本发明涉及轨道交通系统,特别是涉及一种基于多源信息智能融合的地铁列车测速方法。
背景技术:
1、列车测速是测量列车在轨道上运行的实时速度,目的是速度防护和列车定位,速度防护是通过车载测速设备将实际速度上传给车载子系统,并与紧制速度曲线对照,一旦列车实际速度超过紧制速度,列车产生信号紧制;列车定位依靠车载测速设备和布置在轨道中央的固定点式应答器(信标)组合得出,车载测速设备计算列车走行距离,应答器(信标)提供报文位置数据,经过一定的算法得出列车在线路上的定位,并通过车地无线控制单元,实时连续地将列车位置上报至中央控制器,进而得到移动授权,实现列车在线路上安全高效运行。
2、城市轨道交通有多种类型形式,地铁是其中占比最大也最重要的一种类型。地铁列车具有主要行驶在地下隧道的特点,利用全球卫星导航系统的卫星测速方法对于地铁列车测速处于失效状态,地铁列控系统的测速传感器通常使用测速电机(opg)、编码里程计(odo)、霍尔式速度传感器、多普勒雷达传感器和加速度计等各种检测装置,这些传感器各有其优缺点,如何合理的利用上述多种传感器在时间、空间上的互补或冗余实测数据(信息)进行有机融合,实现对列车速度的安全可靠测量及实时精确估计,是目前地铁列控车载atp的一大难题,也是各大信号厂商的核心技术。
3、测速电机(opg)具有测速范围广、工作适应温度宽、使用寿命长的优点,在列车测速测距单元中使用最多,但是车轮空转或打滑时测速失效,目前西门子、阿尔斯通、卡斯柯、安萨尔多、北京交控等各大信号厂商均使用它作为主用传感器;多普勒雷达测速传感器在轨道交通测速领域中经常作为辅助传感器;加速度计属于惯性导航装置,除了测速之外还可以检测车轮空转、打滑等异常状态,常作为备用传感器与其它传感器一起使用;编码里程计(odo)实际应用不多。
4、因使用单一种类(单源)传感器的测速方式均存在缺点和不足,具有较大的局限性,造成列车测速可靠性和准确性相对较差,多源信息融合测速方式具有高可靠性、高精确性、强冗余性的特点,非常适用于列车测速领域,因此当使用单一的传感器进行测速不能满足列车对测速精度与可靠度的要求时,为了获得更好的测速效果,常对列车测速采用扬长避短、优势互补、组合运用的策略,考虑选取多种传感器搭配使用,但需要根据列车运行环境和各种传感器的特点加以优化组合。
5、多传感器融合测速方案是列车测速技术研发的主攻方向,它通过选用多种测速传感器、运用各种融合方法实现高可靠性和精确性的列车测速效果,国内外专家学者根据不同测速传感器的性能特点进行优化组合,对多传感器组合方案进行了许多研究;与此同时,传感器数据融合算法也成为热门的研究方向之一,因此,为了提高测速精确性和可靠性以提高列控水平,选择适合的传感器种类和设计优秀的融合算法就显得尤为重要。
6、目前,地铁列控系统主流测速单元多数采用测速电机与雷达相结合或者测速电机与加速度计相结合的方式,多源信息融合测速是目前列车测速的热门方向,如何根据列车运行环境合适选择传感器类型及信息融合算法的创新是该方向的研究重点。
7、研究人员最近提出了许多种新的传感器组合应用技术方案,北京交通大学赵悦彤的《基于多源信息融合的列车测速方法研究》将测速电机(opg)、雷达、加速度计的测量值作为信息源,提出了融合三种信息源的列车组合测速方案,它对于地铁测速尤其适合。
8、考虑到列车测速系统对于行车安全异常重要;兼顾系统的特殊性、稳定性和可靠性需求,赵悦彤认为对于多传感器的列车测速系统来说,采用分散式滤波融合结构比较理想,先对各个传感器信息源先进行各自的滤波处理,分别获得状态估计值,再以该状态估计值为主滤波器的输入值,在主滤波器内进行信息融合和最优估计,从而得到最终状态估计,分散式结构如图1所示。
9、在实际列车测速系统中需要对加速度计、测速电机(opg)、雷达测速分别进行预处理,前者得到加速度值,后两个得到速度值,由该信息在数据融合中心得到整个列车的运行状态,分散式的结构降低了整个系统的计算复杂度,在融合之前进行了数据处理,有效提高了滤波的效率,融合技术方案如图2所示。
10、赵悦彤提出的基于联邦卡尔曼滤波算法(分散式架构)设计了列车三源(测速电机、雷达和加速度计)测速信息融合算法,利用标准卡尔曼滤波设计了子滤波器和主滤波器模块分别实现降低传感器白噪声干扰,达到最优估计运行状态的目的,通过仿真测试验证了列车多源信息测速联邦卡尔曼滤波算法的有效性,提高了列车测速抗干扰能力和测速精度,证明该算法具有优越性,她认为对融合算法还可以进一步深入研究,结合列车运行真实情况探讨神经网络、机器学习、粒子群算法等在列车测速方面的应用,设计出具有更好融合效果的列车测速算法。
11、方文轩等人的《视觉组合导航多源融合技术现状及发展》中认为卡尔曼滤波不仅算法较为复杂,而且使用条件较为苛刻,主要受线性系统及白噪声要求的限制,基于卡尔曼滤波的信息融合技术在解决实际应用问题时,总是存在着理想条件下系统模型精确度与现实中系统复杂的差异和变化的矛盾,在卡尔曼滤波基础上,研究人员提出了不同的改进算法以适应实际系统的真实状态。
12、近年来,随着信息处理、数据统计等领域的交流与融合,针对卡尔曼滤波器发散﹑精度较低和降维等问题,研究人员基于模糊理论、神经网络等方法研究出了智能多源信息融合技术,对组合系统模型、噪声模型及增益矩阵进行调整,在不损失状态估计精度的前提下,抑制滤波发散、增加系统鲁棒性。
13、赵悦彤的研究成果存在以下两方面的不足:一方面,卡尔曼融合滤波算法复杂、容易发散;另一方面,根据加速度计、测速电机(opg)、雷达的工作状态分配信息系数,这种做法简单,但有很强的主观性,不太适合于列车牵引、惰行、制动等复杂运行工况(包括频繁起动、加减速、恒速、惰行和制动等)。
技术实现思路
1、为了解决以上技术问题,本发明提供一种基于多源信息智能融合的地铁列车测速方法,包括以下步骤
2、s1、获取实测的第一列车实时速度数据和第二列车实时速度数据,且获取实测的列车实时加速度数据;
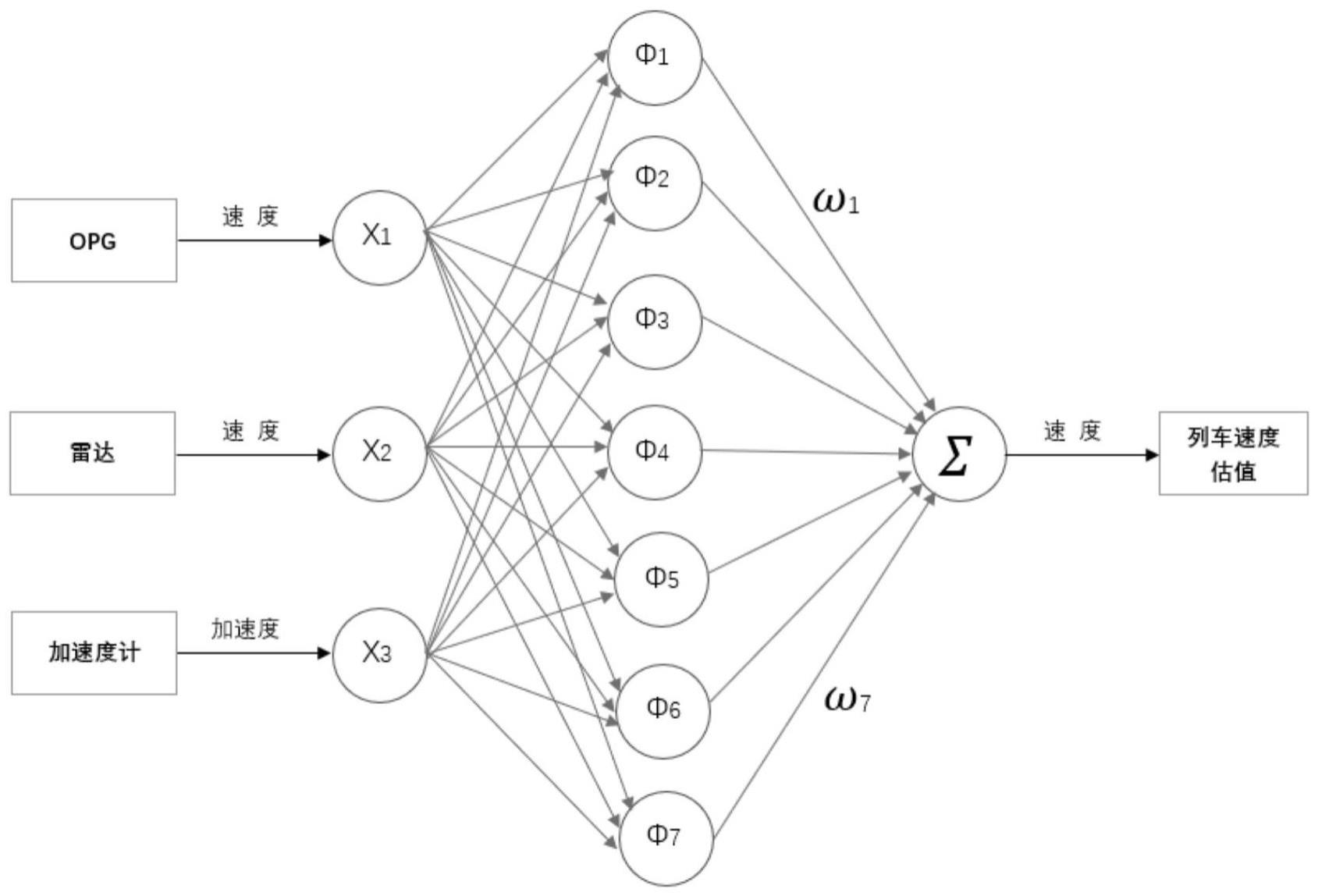
3、s2、将第一列车实时速度数据、第二列车实时速度数据以及列车实时加速度数据作为3个独立的数据源,输入到径向基函数神经网络的输入层中作为输入特征;
4、s3、径向基函数神经网络通过样本训练集数据的学习,初步确定径向基函数模型的3个参数,3个参数分别为径向基函数的中心值c、方差值σ以及隐藏层和输出层之间的连接权重值w;
5、s4、通过样本验证集数据,调整径向基函数模型的3个参数,同时对径向基函数模型能力进行初步评估;
6、s5、通过样本测试集数据,评价径向基函数模型最终的泛化能力,若测速相对误差在2%以内,则稳定该径向基函数模型;
7、将泛化能力符合预期的径向基函数模型投入使用,将第一实时列车速度数据、第二实时列车速度数据以及列车实时加速度数据的实测值作为3维特征向量输入径向基函数模型,利用径向基函数神经网络的自学习能力及非线性映射能力,进而获得1维速度数据向量,即地铁实时速度值。
8、本发明进一步限定的技术方案是:
9、进一步的,步骤s1中,通过测速电机获得第一列车实时速度数据,通过多普勒雷达测速传感器获得第二列车实时速度数据,通过加速度计获得列车实时加速度数据。
10、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s2中,将收集到的历史列车速度数据作为样本,样本包括训练集、验证集以及测试集;选用高斯核函数作为隐藏层的径向基函数,
11、
12、其中,φ表示径向基函数,x表示输入特征向量,c表示径向基函数的中心值参数;σ表示径向基函数的方差值参数。
13、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s3包括以下分步骤
14、s3.1、确定隐藏层节点的数量,采用以下公式:
15、i=2n+a
16、其中,i表示隐藏层节点的数量,n表示输入层节点数量,a为0到10之间的整数;
17、s3.2、确定径向基函数神经网络的3个参数,分别为径向基函数的中心值c、方差值σ以及隐藏层和输出层之间的连接权重w。
18、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s3.2中,使用自组织选取中心学习算法对径向基函数模型的3个参数进行确定。
19、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s3中,随机选取地铁列车某一周内的速度数据和加速度数据作为样本数据集,将此样本数据集划分为训练集、验证集以及测试集三部分,其中训练集占总数据量比例70%,训练径向基函数神经网络后得到3个参数;验证集占总数据量比例10%,用于调整优化参数;训练径向基函数神经网络后得到各个参数;测试集占总数据量比例20%,用于测验模型实际效果。
20、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s3.2中,使用k均值聚类算法对径向基函数中心值c进行确定,包括以下步骤
21、a1、网络初始化,在样本容量中随机选取h个样本作为聚类中心点ci;
22、a2、将输入的训练样本集按最近邻规则分组,按照第p个输入样本xp与中心点ci之间的欧式距离,将xp分配到输入样本的各个聚类集合θp之中;
23、a3、重新调整聚类中心,计算各个聚类集合θp中训练样本的平均值,即新的聚类中心ci,如果新的聚类中心不再发生变化,所得到的ci就是径向基函数神经网络最终的径向基函数中心,否则返回步骤a2进行下一轮求解。
24、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s3.2中,第i个隐藏层节点方差值σi由下式求解得出,
25、
26、其中,cmax表示所选取中心点之间的最大距离。
27、前所述的一种基于多源信息智能融合的地铁列车测速方法,步骤s3.2中,使用最小二乘法得出隐藏层和输出层之间的连接权重w,
28、
29、其中,xp为第p个输入样本,ci为第i个中心点,h为隐藏层节点个数。
30、本发明的有益效果是:
31、(1)本发明中,运用多源信息融合的数据处理方法对各类传感器测量值进行融合处理,能有效地消除传感器采集数据的误差;神经网络算法无需对组合测速系统数学建模,且能够很好地映射非线性特征,在特定条件下可以获得较高的参数估计精度;另外,神经网络计算稳定,不需要矩阵求逆和迭代逼近,计算时间明显少于卡尔曼滤波算法,有利于提高测速系统实时性;
32、(2)本发明中,将多源信息融合技术和神经网络算法的优势有机结合,以测速电机、多普勒雷达以及加速度计这三种不同传感器的速度与加速度测量值作为神经网络的输入,通过神经网络学习算法对三种传感器的速度和加速度实测值的权重系数进行自适应调整,进而获得更为精准的列车速度值估计;具体是先分别通过对测速电机、多普勒雷达以及加速度计传感器的实时测量,获得两个独立的速度实测值和一个加速度实测值;再采用神经网络智能融合器,神经网络通过对传感器测量结果的权重寻优,实现测速结果的智能估计,进而得到地铁列车实时速度的最优估计值;
33、(3)本发明中,根据地铁的运行环境特点及复杂工况,选用合适的传感器;结合测速电机、多普勒雷达的优点,弥补各自的缺点,利用加速度计通过冗余互补;并通过多传感器信息融合技术,利用神经网络的非线性映射及自学习能力,直接获得三种传感器的速度、加速度值,利用加速度与速度密切相关性,间接获得三种传感器的速度实测值,通过智能调节三种传感器的数据权重值,进而得到更加精确可靠的地铁列车实时速度信息。
- 还没有人留言评论。精彩留言会获得点赞!