挂轨式巡检机器人的行走机构、巡检机器人及巡检系统的制作方法
本申请涉及器人,尤其涉及挂轨式巡检机器人的行走机构、巡检机器人及巡检系统。
背景技术:
1、挂轨式巡检机器人是基于固定式轨道实现移动的巡检机器人系统,该机器人的运动不依赖地面环境,按照规划路径行走,以对规划路径沿线的情形进行实时监测或异常报警等,常用于电力路线、轨道、隧道、楼宇等,其行驶过程中可实现自主爬坡与转弯,可满足一些狭窄区域内巡检的需求。目前挂轨式巡检机器人的固定式轨道形式主要有工型、t型、c型、l型、圆型等类型。其中工型轨道能够一定程度避免杂物落在轨道上,但巡检机器人因需要较大的转弯半径,不便于灵活设置巡检路径,导致巡检机器人无法靠近重点监测位置;c型轨道能够一定程度避免杂物落在轨道上,但是轨道形状特殊,采购较为困难;t型轨道无法避免杂物落在轨道上,轨道上的杂物能够对挂轨机器人的行走机构运动产生影响;l型轨道安装方式不对称导致机器人行走机构无法实现对称,进而造成运动过程中机器人的重心不稳,出现晃动与倾斜,同时无法避免杂物落在轨道上对挂轨机器人的行走机构运动产生影响。
2、此外,为保证巡检机器人安全运行,不发生脱轨的意外,需要确保巡检机器人牢固地贴合在轨道上,因此需要对挂轨式巡检机器人运动时各个可能脱轨的方向设计限位装置。根据工型、t型以及c型轨道截面特点,在截面上轨道巡检机器人至少需要6个位置的限位才能实现稳定运动;根据l型轨道截面特点,在截面上轨道巡检机器人至少需要4个位置限位才能实现稳定运动;根据圆型轨道截面特点,在截面上轨道巡检机器人至少需要实现3个位置限位才能实现稳定运动,但是只能限制机器人径向方向的位置,无法限制机器人周向方向的位置,因此圆型轨道无法实现巡检机器人的真正限位,移动过程中能够造成晃动的现象。
技术实现思路
1、本申请旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本申请的目的在于提出挂轨式巡检机器人的行走机构、巡检机器人及巡检系统,不仅能够有效避免杂物落在v型轨道上,同时v型轨道满足形状对称且易加工实现的需求,此外v型轨道能够以最少的限位方向实现挂轨式巡检机器人与其牢固地贴合,在降低挂轨式巡检机器人的机构复杂度的同时实现巡检机器人的稳定。
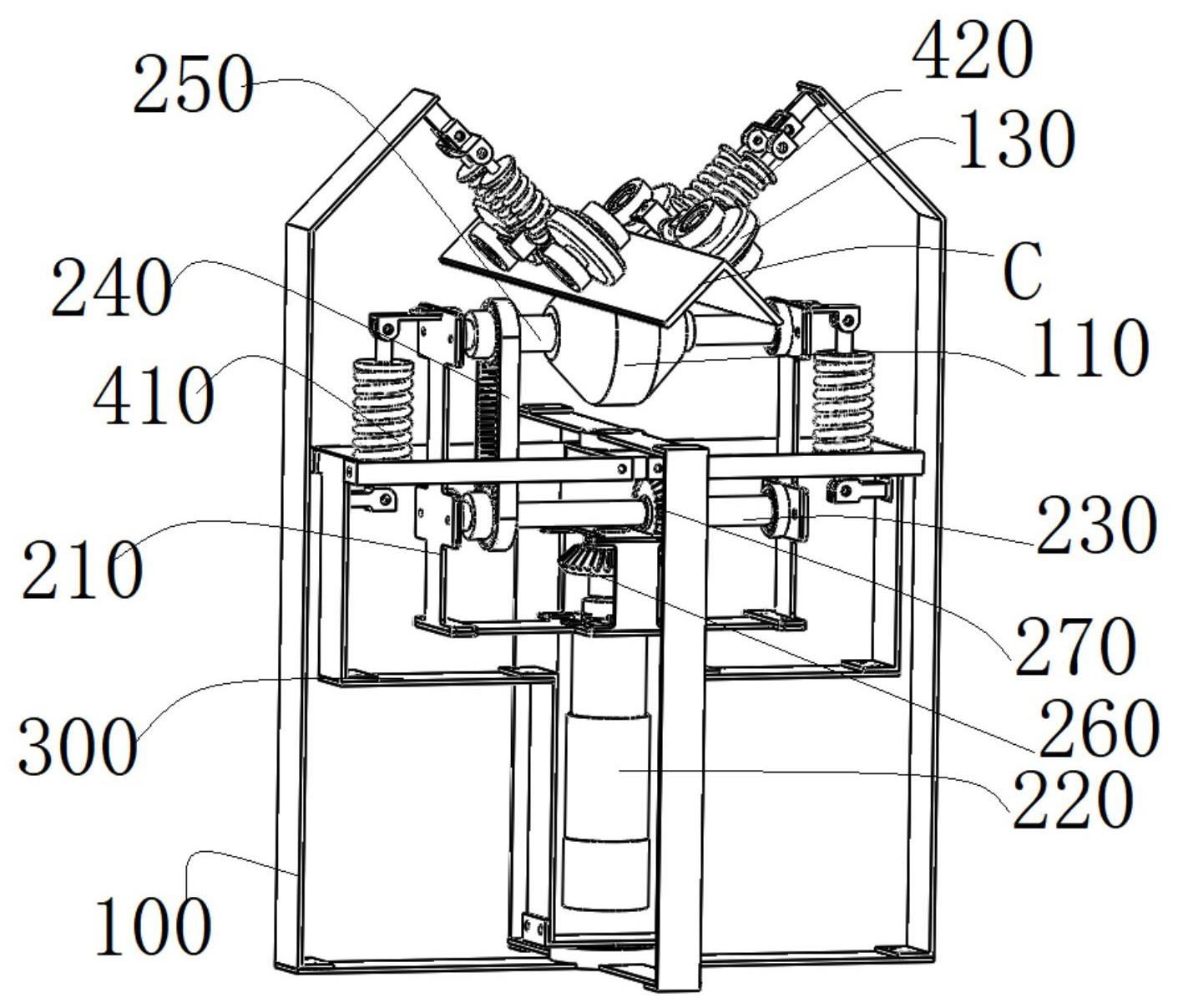
2、根据本申请的第一个方面提出了一种挂轨式巡检机器人的行走机构,所述行走机构适于在v形轨道上行走,其包括:基座以及分别设置在所述基座上的驱动轮、第一限位轮和第二限位轮,所述驱动轮呈对称布置的两侧端部与所述v形轨道呈对称布设的侧斜面分别形成斜面接触配合;所述第一限位轮和所述第二限位轮分别垂直于所述v形轨道的侧斜面并对应配合所述驱动轮,用于夹紧所述v形轨道。
3、在一些实施例中,所述行走机构还包括驱动组件,所述驱动组件安装于所述基座,用于驱动所述驱动轮。
4、在一些实施例中,所述驱动组件包括电机支架、电机、传动轴、同步带和转轴;其中所述电机支架的底部设置用于固定所述电机的电机基座;所述传动轴和所述转轴分别与所述电机支架转动连接且两者间隔设置;所述电机驱动所述传动轴转动,所述同步带套设在所述传动轴和所述转轴之间,所述驱动轮套设在所述转轴中部。
5、在一些实施例中,所述行走机构还包括减震组件,所述减震组件包括至少两个位于所述电机支架两侧且呈对侧分布的第一减震器,用于所述驱动轮减震并使得所述驱动轮与所述v形轨道紧密接触。
6、在一些实施例中,所述第一减震器竖直设置,其一端连接所述电机支架,另一端连接套设在所述电机支架外部的内支架上;所述内支架可转动的设置在所述基座内部。
7、在一些实施例中,所述减震组件还包括第二减震器;所述第二减震器分别与所述第一限位轮和所述第二限位轮一一对应,其分别连接在所述第一限位轮与所述基座之间以及所述第二限位轮与所述基座之间。
8、在一些实施例中,所述基座呈u形,所述驱动轮位于所述基座的中部;所述第一限位轮设置在所述基座的一端,所述第二限位轮设置在所述基座的另一端,所述第一限位轮和所述第二限位轮相对于所述驱动轮对称设置。
9、在一些实施例中,所述第一限位轮和所述第二限位轮分别至少为两个并沿所述v形轨道的延伸方向间隔设置;相邻的所述第一限位轮之间的距离等于相邻的所述第一限位轮之间的距离,且该距离根据所述v形轨道的最小弯道半径设定。
10、根据本申请的第二个方面提出了一种巡检机器人,包括巡检机器人本体和至少一个根据上述任一实施例中所述的行走机构。
11、根据本申请的第三个方面提出了一种巡检系统,包括v形轨道和上述任一实施例中所述的巡检机器人。
12、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种挂轨式巡检机器人的行走机构,其特征在于,所述行走机构适于在v形轨道上行走,其包括:基座以及分别设置在所述基座上的驱动轮、第一限位轮和第二限位轮,所述驱动轮呈对称布置的两侧端部与所述v形轨道呈对称布设的侧斜面分别形成斜面接触配合;所述第一限位轮和所述第二限位轮分别垂直于所述v形轨道的侧斜面并对应配合所述驱动轮,用于夹紧所述v形轨道。
2.根据权利要求1所述的行走机构,其特征在于,所述行走机构还包括驱动组件,所述驱动组件安装于所述基座,用于驱动所述驱动轮。
3.根据权利要求2所述的行走机构,其特征在于,所述驱动组件包括电机支架、电机、传动轴、同步带和转轴;其中所述电机支架的底部设置用于固定所述电机的电机基座;所述传动轴和所述转轴分别与所述电机支架转动连接且两者间隔设置;所述电机驱动所述传动轴转动,所述同步带套设在所述传动轴和所述转轴之间,所述驱动轮套设在所述转轴中部。
4.根据权利要求3所述的行走机构,其特征在于,所述行走机构还包括减震组件,所述减震组件包括至少两个位于所述电机支架两侧且呈对侧分布的第一减震器,用于所述驱动轮减震并使得所述驱动轮与所述v形轨道紧密接触。
5.根据权利要求4所述的行走机构,其特征在于,所述第一减震器竖直设置,其一端连接所述电机支架,另一端连接套设在所述电机支架外部的内支架上;所述内支架可转动的设置在所述基座内部。
6.根据权利要求4或5所述的行走机构,其特征在于,所述减震组件还包括第二减震器;所述第二减震器分别与所述第一限位轮和所述第二限位轮一一对应,其分别连接在所述第一限位轮与所述基座之间以及所述第二限位轮与所述基座之间。
7.根据权利要求4所述的行走机构,其特征在于,所述基座呈u形,所述驱动轮位于所述基座的中部;所述第一限位轮设置在所述基座的一端,所述第二限位轮设置在所述基座的另一端,所述第一限位轮和所述第二限位轮相对于所述驱动轮对称设置。
8.根据权利要求7所述的行走机构,其特征在于,所述第一限位轮和所述第二限位轮分别至少为两个并沿所述v形轨道的延伸方向间隔设置;相邻的所述第一限位轮之间的距离等于相邻的所述第一限位轮之间的距离,且该距离根据所述v形轨道的最小弯道半径设定。
9.一种巡检机器人,其特征在于,包括巡检机器人本体和至少一个根据权利要求1-8任一项所述的行走机构。
10.一种巡检系统,其特征在于,包括v形轨道和权利要求9所述的巡检机器人。
技术总结
本申请提出挂轨式巡检机器人的行走机构、巡检机器人及巡检系统,所述行走机构适于在V形轨道上行走,其包括:基座以及分别设置在所述基座上的驱动轮、第一限位轮和第二限位轮,所述驱动轮呈对称布置的两侧端部与所述V形轨道呈对称布设的侧斜面分别形成斜面接触配合;所述第一限位轮和所述第二限位轮分别垂直于所述V形轨道的侧斜面并对应配合所述驱动轮,用于夹紧所述V形轨道。本申请不仅能够有效避免杂物落在V型轨道上,同时V型轨道满足形状对称且易加工实现的需求,此外V型轨道能够以最少的限位方向实现挂轨式巡检机器人与其牢固地贴合,在降低挂轨式巡检机器人的机构复杂度的同时实现巡检机器人的稳定。
技术研发人员:马龙,魏峰,李迎喜,赵墨波,赵云龙,张维振,郑杰,马建,丰颖,许伟健
受保护的技术使用者:煤炭科学技术研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!