一种曲线导轨机器人的模块化行走装置
本技术涉及机器人,特别涉及一种曲线导轨机器人的模块化行走装置。
背景技术:
1、曲线导轨机器人是机器人的一种,在挂轨式曲线导轨机器人的行进过程中,行走和悬挂装置需要多种基础功能,主要包括:1、为机器人提供驱动力;2、固定机器人位置的抱轨功能;3、令机器人可以在曲线导轨上进行转向;4、具有一定的承重能力。
2、目前,现有的曲线导轨机器人的行走装置,多为以上功能分别设计各自的机械结构,导致在结构设计上难以实现机械结构的一体化,轻量化和模块化的特点。但是,对于挂轨机器人而言,其是否轻量和小型是其能否适应多样的工作环境和能否满足安全性需求的问题的关键。而不能实现模块化则影响了此类装置对相似机器人的通用性和对该装置拆装、检修以及更换的便利性需求。
3、为此,本申请提供了一种曲线导轨机器人的模块化行走装置来解决上述技术问题。
技术实现思路
1、本申请的目的在于提供一种曲线导轨机器人的模块化行走装置,集成了转向,驱动,承重三个功能于一体,遵循模块化设计思路,有较强的适用性和通用性,且便于检修,更换和拆装。
2、为实现上述目的,本申请提供如下技术方案:一种曲线导轨机器人的模块化行走装置,包括设置于曲线导轨主体上的机器人主体,所述机器人主体的下端面转动安装有两个套设于所述曲线导轨主体上的驱动装置,所述驱动装置包括抱轨盒,所述抱轨盒转动安装于所述机器人主体的下端面,且所述抱轨盒的中部水平开设有供所述曲线导轨主体贯穿的抱轨通道,所述抱轨盒的底部安装有驱动机构,所述驱动机构包括两组对称设置的电机与驱动轮,两个所述驱动轮均伸至所述抱轨通道内并与所述曲线导轨主体抵接,两个所述驱动轮相向的一侧均设置有约束导轮,两个所述约束导轮夹持所述曲线导轨主体的中部。
3、作为进一步的优选方案,两个所述抱轨盒沿所述机器人主体下端面的对称轴线设置,对称安装于所述机器人主体的下端面两端。
4、作为进一步的优选方案,所述抱轨盒的上端面固定有交叉滚子轴承,所述交叉滚子轴承转动安装于所述机器人主体的下端面。
5、作为进一步的优选方案,所述曲线导轨主体为工字型轨道,且所述抱轨通道为供所述曲线导轨主体贯穿的t字型通槽。
6、作为进一步的优选方案,所述电机与驱动轮传动配合,且两组所述电机与所述驱动轮在所述抱轨盒内镜像排布,所述驱动轮抵接所述曲线导轨主体的顶部下端面。
7、作为进一步的优选方案,所述抱轨盒内底部对称构造有两个固定架,且两个所述约束导轮分别转动安装于两个所述固定架上,所述约束导轮抵接于所述曲线导轨主体的中部侧壁。
8、作为进一步的优选方案,两个所述驱动轮相向的一侧对称开设有供所述约束导轮置入的安装槽。
9、综上,本实用新型的技术效果和优点:
10、1、本申请集成了行走装置的转向,驱动,承重三个功能于一体,遵循模块化设计思路,有较强的适用性和通用性,且便于检修,更换和拆装。
11、2、本申请的驱动机构采用特殊设计,使约束导轮有空间安装至在驱动轮的内侧,且抱轨盒内的传动相关结构与驱动相关结构的安装排布方式采用镜像设计,从而使得该装置整体结构紧凑,以便于使用。
12、3、本申请由于方便拆装,因此,可根据导轨尺寸更换驱动轮和约束导轮的大小,从而使本装置适用于多种型号的工字型导轨,提高了通用性。
技术特征:
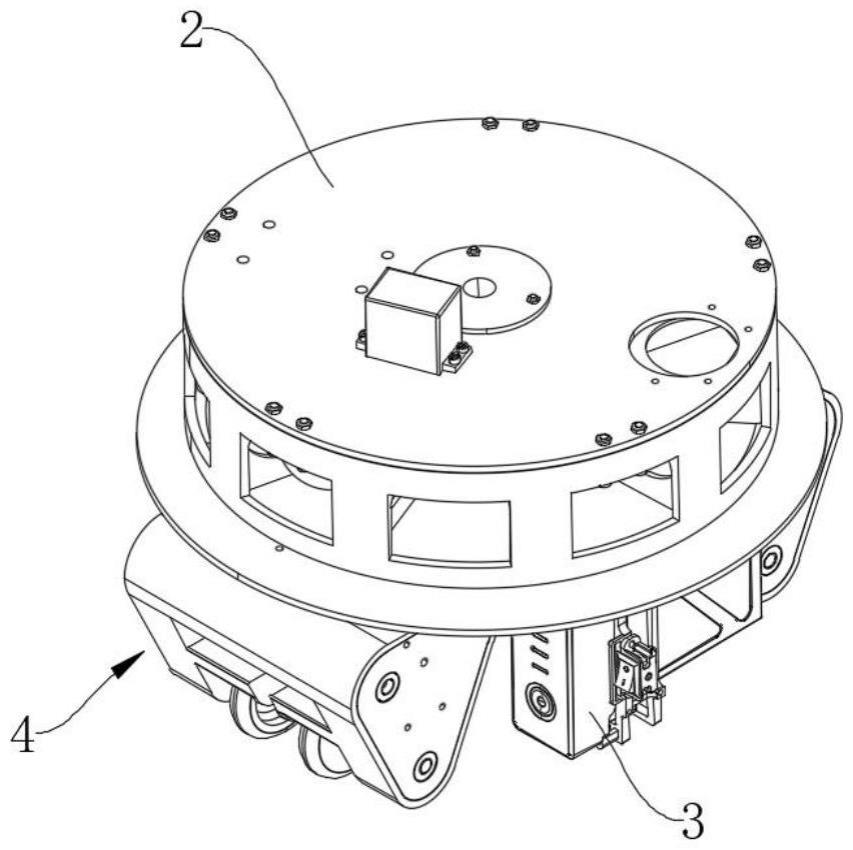
1.一种曲线导轨机器人的模块化行走装置,包括设置于曲线导轨主体(1)上的机器人主体(2),所述机器人主体(2)的下端面转动安装有两个套设于所述曲线导轨主体(1)上的驱动装置(4),其特征在于:所述驱动装置(4)包括抱轨盒(401),所述抱轨盒(401)转动安装于所述机器人主体(2)的下端面,且所述抱轨盒(401)的中部水平开设有供所述曲线导轨主体(1)贯穿的抱轨通道(403),所述抱轨盒(401)的底部安装有驱动机构(5),所述驱动机构(5)包括两组对称设置的电机(501)与驱动轮(502),两个所述驱动轮(502)均伸至所述抱轨通道(403)内并与所述曲线导轨主体(1)抵接,两个所述驱动轮(502)相向的一侧均设置有约束导轮(504),两个所述约束导轮(504)夹持所述曲线导轨主体(1)的中部。
2.根据权利要求1所述的一种曲线导轨机器人的模块化行走装置,其特征在于:两个所述抱轨盒(401)沿所述机器人主体(2)下端面的对称轴线设置,对称安装于所述机器人主体(2)的下端面两端。
3.根据权利要求1所述的一种曲线导轨机器人的模块化行走装置,其特征在于:所述抱轨盒(401)的上端面固定有交叉滚子轴承(402),所述交叉滚子轴承(402)转动安装于所述机器人主体(2)的下端面。
4.根据权利要求1所述的一种曲线导轨机器人的模块化行走装置,其特征在于:所述曲线导轨主体(1)为工字型轨道,且所述抱轨通道(403)为供所述曲线导轨主体(1)贯穿的t字型通槽。
5.根据权利要求4所述的一种曲线导轨机器人的模块化行走装置,其特征在于:所述电机(501)与驱动轮(502)传动配合,且两组所述电机(501)与所述驱动轮(502)在所述抱轨盒(401)内镜像排布,所述驱动轮(502)抵接所述曲线导轨主体(1)的顶部下端面。
6.根据权利要求5所述的一种曲线导轨机器人的模块化行走装置,其特征在于:所述抱轨盒(401)内底部对称构造有两个固定架(404),且两个所述约束导轮(504)分别转动安装于两个所述固定架(404)上,所述约束导轮(504)抵接于所述曲线导轨主体(1)的中部侧壁。
7.根据权利要求6所述的一种曲线导轨机器人的模块化行走装置,其特征在于:两个所述驱动轮(502)相向的一侧对称开设有供所述约束导轮(504)置入的安装槽(503)。
技术总结
本技术公开了一种曲线导轨机器人的模块化行走装置,涉及到机器人技术领域,包括设置于曲线导轨主体上的机器人主体,机器人主体的下端面转动安装有两个套设于曲线导轨主体上的驱动装置,驱动装置包括抱轨盒,抱轨盒转动安装于机器人主体的下端面,且抱轨盒的中部水平开设有供曲线导轨主体贯穿的抱轨通道,抱轨盒的底部安装有驱动机构,驱动机构包括两组对称设置的电机与驱动轮,两个驱动轮均伸至抱轨通道内并与曲线导轨主体抵接,两个驱动轮相向的一侧均设置有约束导轮。本技术集成了转向,驱动,承重三个功能于一体,遵循模块化设计思路,有较强的适用性和通用性,且便于检修,更换和拆装。
技术研发人员:罗庆生,段宇皓,白镒瑄,赵昀喆,王译篌,张雨茵,徐秋语,栾奕,邵怡康
受保护的技术使用者:北京理工大学
技术研发日:20230302
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!