一种夹爪式索道运行小车的制作方法
本技术涉及输电线路施工的,具体涉及一种夹爪式索道运行小车。
背景技术:
1、特高压输电线路工程中塔材、导线、地材及施工装备等各类物料运输量大多数通过索道运输,但是在索道运输中,由于人工搬运物料工作量大,同时还由于送料机械化和自动化程度低,造成索道运输效率低的问题。
技术实现思路
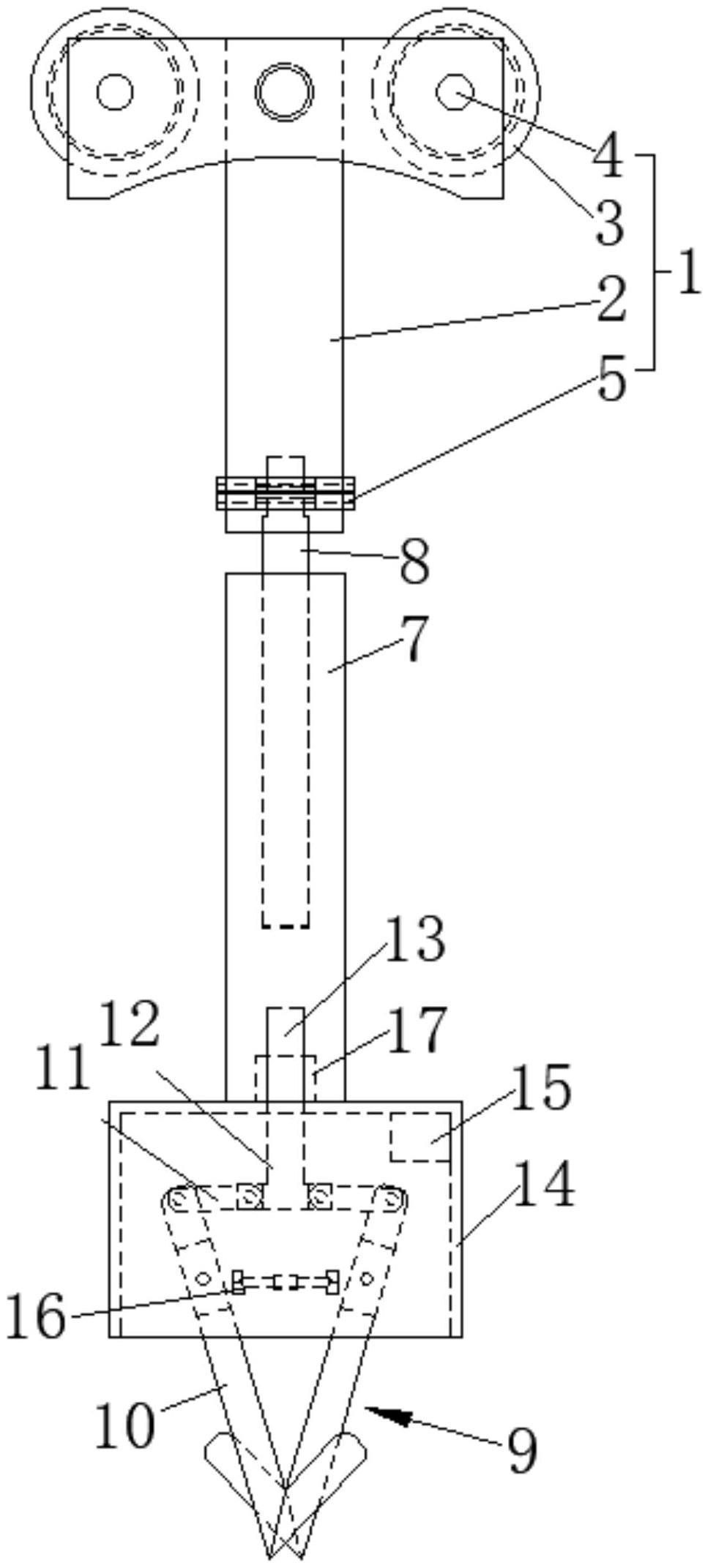
1、为了解决在索道运输中,由于人工搬运物料工作量大,同时还由于送料机械化和自动化程度低,造成索道运输效率低的问题,本实用新型提一种夹爪式索道运行小车,包括运行小车主体(1)、连接主体、夹爪机构(9)、第一动力伸缩机构和第二动力伸缩机构;
2、所述连接主体的上端通过所述第一动力伸缩机构与所述运行小车主体(1)连接,下端通过所述第二动力伸缩机构与所述夹爪机构(9)连接;
3、所述夹爪机构(9)在所述第二动力伸缩机构的作用下具有张开的第一状态和闭合的第二状态,所述夹爪机构(9)基于所述第一状态和第二状态实现对物料(18)的夹持。
4、优选的,所述第一动力伸缩机构包括提升液压油缸(8);
5、所述提升液压油缸(8)上端与所述运行小车主体(1)的底部固定,下端与所述连接主体的顶部固定;
6、所述第二动力伸缩机构包括夹爪液压油缸(13);
7、所述夹爪液压油缸(13)的上端与所述连接主体的底部固定,下端与所述夹爪机构的顶部连接。
8、优选的,所述连接主体包括呈柱状结构的提升主体(7);
9、所述第一动力伸缩机构的上端与所述运行小车主体(1)固定,下端与所述提升主体(7)的上端固定。
10、优选的,所述连接主体还包括底部敞开的壳体结构的夹持架体(14);
11、所述夹爪机构(9)设置于所述夹持架体(14)内;
12、所述第二动力伸缩机构的上端穿过所述夹持架体(14)顶壁与所述提升主体(7)的下端固定,下端与所述夹爪机构(9)铰接。
13、优选的,所述夹爪机构(9)至少为两组,沿所述第二动力伸缩机构周侧均布;
14、所述夹爪机构(9)的一端与所述第二动力伸缩机构的下端铰接,另一端为自由端;
15、在所述夹爪机构(9)的一端和另一端之间具有转动点,每组夹爪机构(9)均通过所述转动点与连接主体铰接;
16、所述每组夹爪机构(9)在所述第二动力伸缩机构的作用下基于转动点转动,使所述至少两组夹爪机构(9)的自由端相互远离实现张开的第一状态;或相互靠近实现闭合的第二状态。
17、优选的,所述每组夹爪机构(9)包括夹爪本体(10)和夹爪连杆(11);
18、所述夹爪本体(10)和所述夹爪连杆(11)均呈杆状结构,通过销轴铰接;
19、所述夹爪连杆(11)远离所述夹爪本体(10)的端部为所述一端。
20、优选的,所述夹爪机构(9)还包括铰接结构;
21、所述铰接结构安装于所述连接主体上;
22、所述转动点位于所述夹爪本体(10)上,通过所述铰接结构与所述连接主体铰接。
23、优选的,所述夹爪本体(10)背离所述夹爪连杆(11)的端部为自由端,设置有挂钩。
24、优选的,所述夹爪机构(9)还包括夹爪主体(12);
25、所述夹爪主体(12)沿垂直于所述第二动力伸缩机构的伸缩方向布置,并固定于所述第二动力伸缩机构的下端;
26、所述一端与所述夹爪主体(12)铰接。
27、优选的,还包括用于检测其与所述物料(18)的距离的位置检测装置;
28、所述位置检测装置安装于所述连接主体上。
29、优选的,所述位置检测装置包括双目定位装置(16);
30、所述双目定位装置(16)的视角方向朝下。
31、优选的,还包括控制装置(15);
32、所述控制装置(15)固定于所述连接主体上,并与所述第一动力伸缩机构、所述第二动力伸缩机构和所述位置检测装置连接;
33、所述控制装置(15)用于:根据所述位置检测装置检测到其与所述物料(18)的距离,分别控制所述第一动力伸缩机构和所述第二动力伸缩机构进行升降运动,进而带动所述夹爪机构(9)靠近所述物料(18)并实现夹爪机构(9)夹持所述物料(18)的操作。
34、优选的,所述运行小车还包括报警装置(17);
35、所述第一动力伸缩机构上设置有重量传感器;
36、所述第一动力伸缩机构通过所述重量传感器发送重量信号与所述控制装置(15)连接;
37、所述控制装置(15)基于所述重量信号发送控制信号与所述报警装置(17)连接;
38、当输送所述物料(18)时,所述第一动力伸缩机构基于所述物料(18)的重量输出重量信号至所述控制装置(15),所述控制装置(15)基于所述重量信号发送控制信号至所述报警装置(17),所述报警装置(17)基于所述控制信号进行超载报警。
39、基于同一构思,本实用新型还提供了一种货运索道运行系统,包括承载索(19)、牵引索(20)和至少一个夹爪式索道运行小车;
40、所述承载索(19)和所述牵引索(20)平行设置于物料(18)的堆放点和所述物料(18)的装卸点之间;
41、所述运行小车的运行小车主体(1)悬挂于所述承载索(19)上;
42、所述运行小车的运行小车主体(1)的抱索器(5)夹持所述牵引索(20)。
43、优选的,所述运行小车设置为多个;
44、所述运行小车的控制装置(15)向其他所述控制装置(15)发送自身的状态信号,并接收其他所述控制装置(15)的状态信号;
45、当所有所述控制装置(15)发送的状态信号均满足施工需求时,多个控制装置(15)分别控制对应所述运行小车同步提升所述物料(18)。
46、与现有技术相比,本实用新型的有益效果为:
47、1.本实用新型提供了一种夹爪式索道运行小车,包括运行小车主体、连接主体、夹爪机构、第一动力伸缩机构和第二动力伸缩机构;所述连接主体的上端通过所述第一动力伸缩机构与所述运行小车主体连接,下端通过所述第二动力伸缩机构与所述夹爪机构连接;所述夹爪机构在所述第二动力伸缩机构的作用下具有张开的第一状态和闭合的第二状态,所述夹爪机构基于所述第一状态和第二状态实现对物料的夹持;本实用新型提供的运行小车通过位于运行小车主体与连接主体之间的动力伸缩机构的伸缩,实现运行小车整体高度的改变,同时位于夹爪机构与连接主体之间的动力伸缩机构控制夹爪机构的状态,从而控制物料的夹持与卸载,减小人工装卸、提升物料工作量,提升送料机械化和自动化程度,进而提升索道的运输效率。
48、2.本实用新型提供的一种货运索道运行系统,针对货运索道运输物料,运行小车主体悬挂于承载索上,运行小车主体的抱索器夹持牵引索,位置检测装置检测到其与物料之间的距离后,发送距离信号至控制装置,控制装置基于距离信号发送控制信号控制两个动力伸缩机构分别进行升降运动,从而实现夹爪机构对物料的夹持和对夹爪机构的提升,进而实现对重量大、长度大的塔材等大型物料的自动提升,减小人工装卸、提升物料工作量,提升索道施工上下料机械化、自动化程度。
- 还没有人留言评论。精彩留言会获得点赞!