一种轨道巡检机器人底盘的制作方法
本技术涉及轨道检测设备,具体是一种轨道巡检机器人底盘。
背景技术:
1、在城市轨道交通和高速铁路领域,地铁作为城市轨道交通中最为重要的一员,在承担城市交通运输中发挥着越来越重要的作用。隧道在建设完成后随着地铁的运营时间增长,由于受到地面、周边建筑物负载及土体扰动、隧道周边工程施工、隧道工程结构施工及列车运行振动等影响,会产生多种隧道结构病害,另外,隧道内安装的设备受长时间列车振动影响,可能导致松动或脱落从而导致地铁限界的改变,这些对列车的正常运营会造成安全隐患或危害,需要不定期对地铁限界进行检测。现有技术中,轨道巡检机器人成为了目前轨道巡检的趋势,但是现有轨道巡检机器人存在无法良好适配轨道结构、本身结构复杂、可维护能力低、行走过程中机器人震动过大导致测量不精确等问题,底盘作为轨道巡检机器人的重要组成部分,承载着机器人定位、导航、移动、避障等多种功能,是机器人必不可少的重要硬件。机器人底盘性能的好坏,直接影响着机器人整体运行功能。因此,一种结构简单、轨道适配性能好、具有减震功能的底盘成了轨道巡检机器人一个亟待解决的问题。
技术实现思路
1、本实用新型的目的在于提供一种轨道巡检机器人底盘,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种轨道巡检机器人底盘,包括底盘支架,所述底盘支架包括两根平行布置的调节杆,两根所述调节杆两端通过连接杆固定连接;
4、所述调节杆包括第一横杆以及与所述第一横杆滑动连接的至少一根第二横杆,所述第二横杆上设有调节滑槽,所述第二横杆与所述第一横杆通过螺栓固定连接;
5、所述底盘支架两端均设有驱动轮组件,所述驱动轮组件通过底盘减震组件与所述底盘支架活动连接,所述底盘减震组件包括与底盘支架连接的侧向导板、与驱动部连接的导向底板,所述侧向导板与所述导向底板上下滑动连接,所述侧向导板与所述导向底板之间设有减震器。
6、作为本实用新型进一步的方案:所述调节杆与所述连接杆组件矩形的底盘框架,所述底盘框架上端设有外壳,所述外壳上设有把手。
7、作为本实用新型进一步的方案:所述第一横杆两端均滑动连接有第二横杆,两根所述第二横杆、第一横杆均为槽钢结构且第二横杆扣接在第一横杆上。
8、作为本实用新型进一步的方案:所述第一横杆上设有多个固定螺纹孔,所述第二横杆上开设有调节滑槽,所述调节滑槽上设有紧固螺栓,所述第二横杆通过紧固螺栓、固定螺纹孔与所述第一横杆固定连接。
9、作为本实用新型进一步的方案:所述底盘减震组件与所述底盘支架之间设有轨道贴合组件,所述轨道贴合组件包括与底盘减震组件连接的水平导轨、与底盘支架连接的水平滑块,所述水平滑块滑动连接于所述水平导轨上。
10、作为本实用新型进一步的方案:所述侧向导板上端设有弹簧固定座,所述弹簧固定座靠近底盘支架的一端安装有弹簧,所述弹簧远离所述弹簧固定座的一端与所述连接杆固定连接。
11、作为本实用新型进一步的方案:所述导向底板一侧设有垂直导轨,所述垂直导轨上滑动连接有垂直滑块,所述垂直滑块与所述侧向导板固定连接,所述侧向导板上端一侧设有上固定块,所述导向底板下端一侧设有与所述上固定块对应布置的下固定块,所述减震器的两端分别与所述上固定块、下固定块连接。
12、作为本实用新型进一步的方案:所述驱动轮组件包括与导向底板底端固定连接的驱动轮固定底座,所述驱动轮固定底座上设有驱动电机,所述驱动电机远离所述底盘支架的一端动力连接有驱动轮。
13、作为本实用新型进一步的方案:所述驱动轮固定底座上设有电机防尘罩,所述驱动电机位于所述电机防尘罩内,所述驱动电机通过电机轴端连接法兰与所述驱动轮固定底座固定连接,所述电机轴端连接法兰外侧设有电机安装法兰,电机安装法兰与所述电机轴端连接法兰之间设有电机轴承,所述电机安装法兰与驱动轮固定连接,所述电机安装法兰固定连接有电机端盖,所述电机端盖与驱动电机的输出轴固定连接。
14、作为本实用新型进一步的方案:所述驱动轮固定底座下端设有导向轮,所述导向轮的转动轴线为竖直状态。
15、与现有技术相比,本实用新型的有益效果是:
16、1、本实用新型通过设置可以调节的底盘框架,因而可以通过调节杆底盘的宽度来适应不同宽度的轨道,此外,还设有轨道贴合组件实现对轨道的夹紧功能,进而可以适应不同的尺寸不同的通过,提高了本申请底盘的通用性能;
17、2、本实用新型通过设置底盘减震组件,通过减震器降低底盘行走过程中的震动及颠簸,从而保证了底盘上搭载设备的检测稳定性及精度;
18、3、本申请轨道底盘与轨道适配效果好、防水防尘、布置紧凑、空间利用率高、具有减震功能、能适应隧道环境要求、结构简单等优点。
技术特征:
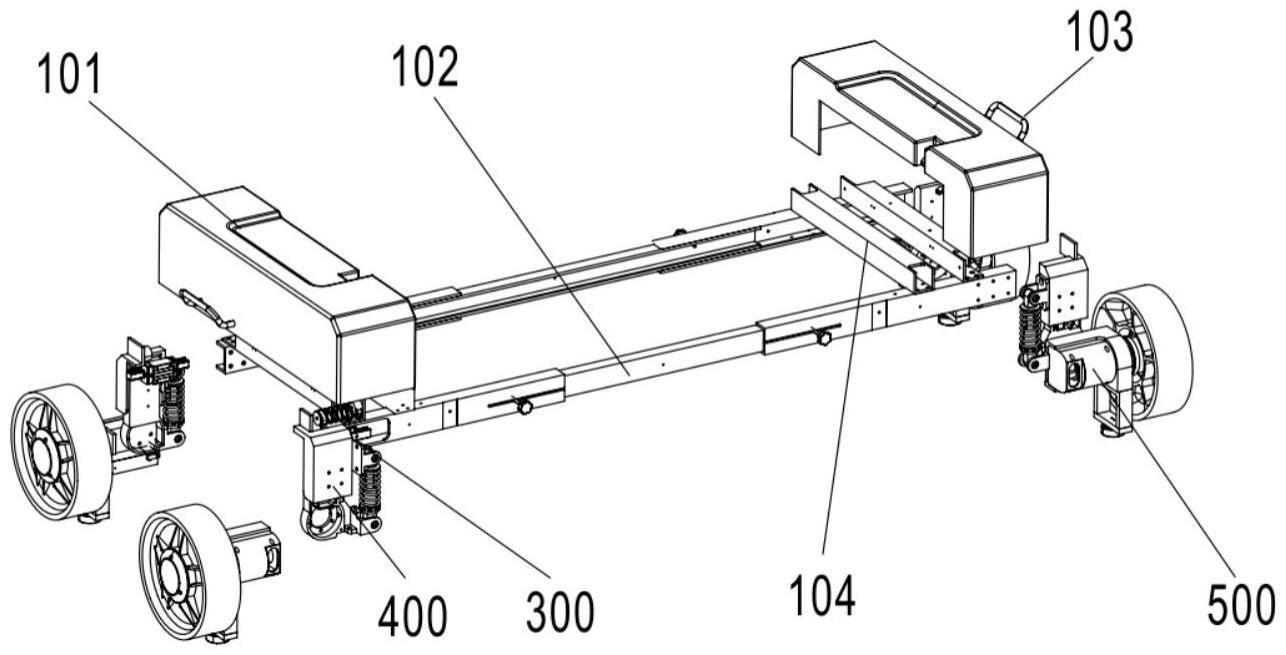
1.一种轨道巡检机器人底盘,包括底盘支架(100),所述底盘支架(100)包括两根平行布置的调节杆(102),两根所述调节杆(102)两端通过连接杆(104)固定连接;
2.根据权利要求1所述的一种轨道巡检机器人底盘,其特征在于,所述底盘减震组件(400)与所述底盘支架(100)之间设有轨道贴合组件(300),所述轨道贴合组件(300)包括与底盘减震组件(400)连接的水平导轨(304)、与底盘支架(100)连接的水平滑块(303),所述水平滑块(303)滑动连接于所述水平导轨(304)上。
3.根据权利要求1所述的一种轨道巡检机器人底盘,其特征在于,所述调节杆(102)与所述连接杆(104)组成矩形的底盘框架,所述底盘框架上端设有外壳(101),所述外壳(101)上设有把手(103)。
4.根据权利要求1所述的一种轨道巡检机器人底盘,其特征在于,所述第一横杆(1022)两端均滑动连接有第二横杆(1023),第二横杆(1023)、第一横杆(1022)均为槽钢结构且第二横杆(1023)扣接在第一横杆(1022)上。
5.根据权利要求4所述的一种轨道巡检机器人底盘,其特征在于,所述第一横杆(1022)上设有多个固定螺纹孔(1021),所述第二横杆(1023)上开设有调节滑槽(1025),所述调节滑槽(1025)上设有紧固螺栓(1024),所述第二横杆(1023)通过紧固螺栓(1024)、固定螺纹孔(1021)与所述第一横杆(1022)固定连接。
6.根据权利要求1所述的一种轨道巡检机器人底盘,其特征在于,所述侧向导板(401)上端设有弹簧固定座(301),所述弹簧固定座(301)靠近底盘支架(100)的一端安装有弹簧(302),所述弹簧(302)远离所述弹簧固定座(301)的一端与所述连接杆(104)固定连接。
7.根据权利要求1所述的一种轨道巡检机器人底盘,其特征在于,所述导向底板(402)一侧设有垂直导轨(407),所述垂直导轨(407)上滑动连接有垂直滑块(406),所述垂直滑块(406)与所述侧向导板(401)固定连接,所述侧向导板(401)上端一侧设有上固定块(403),所述导向底板(402)下端一侧设有与所述上固定块(403)对应布置的下固定块(405),所述减震器(404)的两端分别与所述上固定块(403)、下固定块(405)连接。
8.根据权利要求1所述的一种轨道巡检机器人底盘,其特征在于,所述驱动轮组件(500)包括与导向底板(402)底端固定连接的驱动轮固定底座(504),所述驱动轮固定底座(504)上设有驱动电机(506),所述驱动电机(506)远离所述底盘支架(100)的一端动力连接有驱动轮(501)。
9.根据权利要求8所述的一种轨道巡检机器人底盘,其特征在于,所述驱动轮固定底座(504)上设有电机防尘罩(505),所述驱动电机(506)位于所述电机防尘罩(505)内,所述驱动电机(506)通过电机轴端连接法兰(503)与所述驱动轮固定底座(504)固定连接,所述电机轴端连接法兰(503)外侧设有电机安装法兰(509),电机安装法兰(509)与所述电机轴端连接法兰(503)之间设有电机轴承(508),所述电机安装法兰(509)与驱动轮(501)固定连接,所述电机安装法兰(509)固定连接有电机端盖(502),所述电机端盖(502)与驱动电机(506)的输出轴固定连接。
10.根据权利要求8所述的一种轨道巡检机器人底盘,其特征在于,所述驱动轮固定底座(504)下端设有导向轮(507),所述导向轮(507)的转动轴线为竖直状态。
技术总结
本技术公开了一种轨道巡检机器人底盘,包括底盘支架,所述底盘支架包括两根平行布置的调节杆,所述第二横杆上设有调节滑槽,所述第二横杆与所述第一横杆通过螺栓固定连接;所述底盘支架两端均设有驱动轮组件,所述驱动轮组件通过底盘减震组件与所述底盘支架活动连接,所述底盘减震组件包括与底盘支架连接的侧向导板、与驱动部连接的导向底板,所述侧向导板与所述导向底板上下滑动连接,所述侧向导板与所述导向底板之间设有减震器,本技术通过设置可以调节的底盘框架,因而可以通过调节杆底盘的宽度来适应不同宽度的轨道,此外,还设有轨道贴合组件实现对轨道的夹紧功能,进而可以适应不同的尺寸不同的通过。
技术研发人员:张永志,吴坤,章海兵,杨梦晨,石科恒,于娟
受保护的技术使用者:科大智能电气技术有限公司
技术研发日:20230524
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!