一种基于多点预瞄的车道保持方法及系统与流程
1.本发明涉及一种基于多点预瞄的车道保持方法及系统,属于汽车电子技术领域。
背景技术:
2.当驾驶员在驾驶车辆的过程中出现疲劳驾驶或分神等现象时,车辆容易偏离车道造成交通事故,为提高车辆行驶安全性,目前已有在车辆上配置车道保持系统来对车辆转向系统进行主动控制,从而使车辆保持在当前车道内行驶,避免因车辆意外偏离车道而出现交通事故。
3.现有的车道保持方法,大多是以车道中心线为目标轨迹,对目标轨迹进行单点预瞄,根据对预瞄点进行计算得到的控制量控制车辆转向目标轨迹行驶,从而使车辆保持在车道内,但是单点预瞄存在控制不稳定、误差大等缺点,容易出现画龙现象(即曲线行驶)。
4.目前也有基于多点预瞄的车道保持方法,例如公布号为cn109383500a的中国发明专利申请文件中,公开了一种基于预瞄点的车道保持方法,该方法通过设置一个远预瞄点和一个近预瞄点,并通过求取两个预瞄点转角控制量的加权和,得到最终的转角控制量,根据最终的转角控制量控制车辆保持在车道内。虽然该方法相对于单点预瞄来说能够取得较好的稳定性,但是由于预瞄点的选取具有随机性,容易出现选取的预瞄点偏离目标轨迹的现象,利用该方法进行车辆控制时,根据预瞄点是否偏离目标轨迹,车辆会一会沿着目标轨迹行驶,一会偏离目标轨迹行驶,即会出现控制不稳定的问题。
技术实现要素:
5.本发明的目的是提供一种基于多点预瞄的车道保持方法及系统,用以解决利用现有车道保持方法进行车道保持控制会存在控制不稳定的问题。
6.为实现上述目的,本发明提供了一种基于多点预瞄的车道保持方法,该方法包括以下步骤:
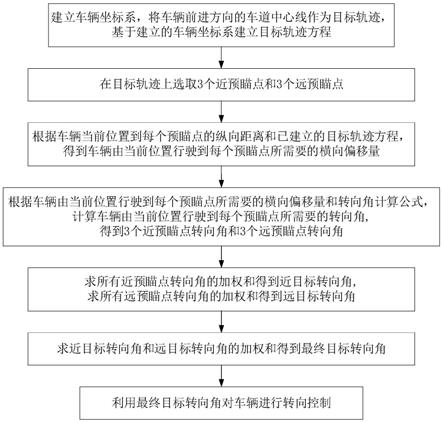
7.(1)确定车辆行驶的目标轨迹,在所述目标轨迹上选取至少两个近预瞄点和至少两个远预瞄点,离车辆近的为近预瞄点,离车辆远的为远预瞄点;
8.(2)计算车辆由当前位置行驶到每个预瞄点所需要的转向角,得到至少两个近预瞄点转向角和至少两个远预瞄点转向角;
9.(3)根据所有近预瞄点转向角得到近目标转向角,根据所有远预瞄点转向角得到远目标转向角;
10.(4)根据所述近目标转向角和所述远目标转向角得到最终目标转向角;
11.(5)利用所述最终目标转向角对车辆进行转向控制。
12.本发明还提供了一种基于多点预瞄的车道保持系统,该系统包括图像采集装置、存储器和处理器,所述图像采集装置用于采集车辆前进方向的车道信息,所述处理器执行由所述存储器存储的计算机程序,以实现上述的基于多点预瞄的车道保持方法。
13.本发明的有益效果是:在目标轨迹上选取至少两个近预瞄点,近目标转向角根据
所有近预瞄点转向角得到,这种情况下,即使某个近预瞄点受随机因素的影响偏离了目标轨迹,也能够通过其他几个没有偏离目标轨迹的近预瞄点对其进行修正,从而削弱随机因素对近目标转向角的影响,相对于单个近预瞄点而言,能够提高近目标转向角指向目标轨迹的准确性;同理,在目标轨迹上选取至少两个远预瞄点,相对于单个远预瞄点而言,能够提高远目标转向角指向目标轨迹的准确性,从而保证根据近、远目标转向角得到的最终目标转向角能够准确指向目标轨迹,利用该最终目标转向角对车辆进行转向控制,能够保证车辆沿着目标轨迹行驶,提高车辆的控制稳定性。
14.进一步地,为了进一步提高车辆的控制稳定性,在上述基于多点预瞄的车道保持方法及系统中,根据车辆由当前位置行驶到每个预瞄点所需要的横向偏移量和转向角计算公式,得到车辆由当前位置行驶到每个预瞄点所需要的转向角,所述转向角计算公式为:
[0015][0016]
式中,m
i
为车辆由当前位置行驶到预瞄点i所需要的转向角,y
i
为车辆由当前位置行驶到预瞄点i所需要的横向偏移量,kp为比例系数,kd为微分系数,ki为积分系数。
[0017]
进一步地,在上述基于多点预瞄的车道保持方法及系统中,根据车辆当前位置到每个预瞄点的纵向距离,计算车辆由当前位置行驶到每个预瞄点所需要的横向偏移量。
[0018]
进一步地,在上述基于多点预瞄的车道保持方法及系统中,所述目标轨迹为车辆前进方向的车道中心线。
[0019]
进一步地,在上述基于多点预瞄的车道保持方法及系统中,根据车辆当前位置到每个预瞄点的纵向距离和已建立的目标轨迹方程,得到车辆由当前位置行驶到每个预瞄点所需要的横向偏移量;所述已建立的目标轨迹方程为:
[0020]
y
i
=(a1+a2)/2+(b1+b2)/2*x
i
+(c1+c2)/2*x
i2
+(d1+d2)/2*x
i3
[0021]
式中,y
i
为车辆由当前位置行驶到预瞄点i所需要的横向偏移量,x
i
为车辆当前位置到预瞄点i的纵向距离,a1为左车道线与坐标原点的水平距离,a2为右车道线与坐标原点的水平距离,b1为左车道线航向角,b2为右车道线航向角,c1为左车道线曲率,c2为右车道线曲率,d1为左车道线曲率变化率,d2为右车道线曲率变化率。
[0022]
进一步地,在上述基于多点预瞄的车道保持方法及系统中,所述近目标转向角为所有近预瞄点转向角的加权和,所述远目标转向角为所有远预瞄点转向角的加权和。
[0023]
进一步地,在上述基于多点预瞄的车道保持方法及系统中,所述最终目标转向角为所述近目标转向角和所述远目标转向角的加权和。
附图说明
[0024]
图1是本发明车道保持系统实施例中的基于多点预瞄的车道保持系统结构示意图;
[0025]
图2是本发明车道保持系统实施例中的基于多点预瞄的车道保持方法流程图;
[0026]
图3是本发明车道保持系统实施例中建立的车辆坐标系示意图;
[0027]
图中,1是左车道线,2是右车道线,3是车道中心线。
具体实施方式
[0028]
车道保持系统实施例
[0029]
如图1所示,本实施例的基于多点预瞄的车道保持系统(以下简称车道保持系统),包括图像采集装置、存储器和处理器。其中,图像采集装置采用摄像头实现,摄像头设置在车头中间位置,用于采集车辆前进方向的车道信息,其中,车道信息包括车道中心线以及左车道线与坐标原点的水平距离、右车道线与坐标原点的水平距离、左车道线航向角、右车道线航向角、左车道线曲率、右车道线曲率、左车道线曲率变化率和右车道线曲率变化率。
[0030]
处理器是指微处理器mcu或可编程逻辑器件fpga等的处理装置;存储器包括用于存储信息的物理装置,通常是将信息数字化后再以利用电、磁或者光学等方式的媒体加以存储。例如:利用电能方式存储信息的各式存储器,ram、rom等;利用磁能方式存储信息的的各式存储器,硬盘、软盘、磁带、磁芯存储器、磁泡存储器、u盘;利用光学方式存储信息的各式存储器,cd或dvd。当然,还有其他方式的存储器,例如量子存储器、石墨烯存储器等等。
[0031]
本实施例的车道保持系统能够实现如图2所示的基于多点预瞄的车道保持方法(以下简称车道保持方法),该车道保持方法可以形成计算机程序,计算机程序在存储器中存储,在处理器运行时调用,从而实现该车道保持方法。
[0032]
下面对本实施例的车道保持方法进行详细介绍。
[0033]
(1)建立车辆坐标系。如图3所示,以摄像头为坐标原点o建立车辆坐标系xoy,其中,以车辆前进方向为x轴,以垂直于车辆前进方向向右为y轴。
[0034]
(2)基于步骤(1)中建立的车辆坐标系xoy,建立车道线方程,包括左车道线方程和右车道线方程。
[0035]
左车道线方程如下:
[0036]
y
左
=a1+b1*x+c1*x2+d1*x3[0037]
右车道线方程如下:
[0038]
y
右
=a2+b2*x+c2*x2+d2*x3[0039]
其中,y
左
为左车道线的轨迹,y
右
为右车道线的轨迹,a1为左车道线与坐标原点的水平距离,a2为右车道线与坐标原点的水平距离,b1为左车道线航向角,b2为右车道线航向角,c1为左车道线曲率,c2为右车道线曲率,d1为左车道线曲率变化率,d2为右车道线曲率变化率。
[0040]
(3)基于步骤(2)中建立的左、右车道线方程,建立目标轨迹方程。如图3所示,将车辆前进方方向的车道中心线3作为目标轨迹,车辆左侧为左车道线1,车辆右侧为右车道线2。
[0041]
目标轨迹方程如下:
[0042]
y
target
=(a1+a2)/2+(b1+b2)/2*x+(c1+c2)/2*x2+(d1+d2)/2*x3[0043]
式中,y
target
代表目标轨迹。
[0044]
(4)在车辆前方目标轨迹上选取近预瞄点和远预瞄点,离车辆近的为近预瞄点,离车辆远的为远预瞄点。本实施例中,在目标轨迹上选取3个近预瞄点(见图3中的a1、a2、a3)和3个远预瞄点(见图3中的a4、a5、a6),并根据车辆当前位置到每个预瞄点的纵向距离和已建立的目标轨迹方程,得到车辆由当前位置行驶到每个预瞄点所需要的横向偏移量。
[0045]
假设每个预瞄点的分别坐标为:a1(x1,y1)、a2(x2,y2)、a3(x3,y3)、a4(x4,y4)、a5
(x5,y5)、a6(x6,y6)。其中,车辆当前位置到预瞄点i的纵向距离x
i
=v*t,v为车速,t为预设时间(可根据实际需要调整),x
i
实际上是车辆沿x轴方向在预设时间内的行驶距离;车辆由当前位置行驶到预瞄点i所需要的横向偏移量y
i
=(a1+a2)/2+(b1+b2)/2*x
i
+(c1+c2)/2*x
i2
+(d1+d2)/2*x
i3
。
[0046]
(5)根据车辆由当前位置行驶到每个预瞄点所需要的横向偏移量和转向角计算公式,得到车辆由当前位置行驶到每个预瞄点所需要的转向角,本实施例中共得到3个近预瞄点转向角(m1、m2、m3)和3个远预瞄点转向角(m4、m5、m6)。
[0047]
其中,转向角计算公式为:
[0048][0049]
式中,m
i
为车辆由当前位置行驶到预瞄点i所需要的转向角,y
i
为车辆由当前位置行驶到预瞄点i所需要的横向偏移量,kp为比例系数,kd为微分系数,ki为积分系数,kp、kd、ki的大小根据实际需要设置。
[0050]
(6)求所有近预瞄点转向角的加权和得到近目标转向角m7,求所有远预瞄点转向角的加权和得到远目标转向角m8。
[0051]
m7=w1×
m1+w2×
m2+w3×
m3[0052]
m8=w4×
m4+w5×
m5+w6×
m6[0053]
式中,w1、w2、w3分别是近预瞄点转向角m1、m2、m3的权重,w1+w2+w3=1;w4、w5、w6分别是远预瞄点转向角m4、m5、m6的权重,w4+w5+w6=1。
[0054]
其中,w1、w2、w3三者的值可以是相等的,此时近目标转向角是所有近预瞄点转向角的平均值;当然,w1、w2、w3三者的值也可以不等,此时这三者的值是人为设定好的或者是根据所得近预瞄点转向角的大小动态调整的;w4、w5、w6三者与w1、w2、w3三者类似,这里不再赘述。
[0055]
(7)求近目标转向角m7和远目标转向角m8的加权和得到最终目标转向角m
t
。
[0056]
m
t
=w7×
m7+w8×
m8[0057]
式中,w7、w8分别为近目标转向角m7和远目标转向角m8的权重,w7+w8=1。
[0058]
其中,w7、w8两者的值可以是相等的,此时最终目标转向角是近目标转向角和远目标转向角的平均值;当然,w7、w8的值也可以不等,此时这两者的值是人为设定好的或者是根据所得近、远目标转向角的大小动态调整的。
[0059]
(8)利用最终目标转向角m
t
对车辆进行转向控制。
[0060]
例如,将最终目标转向角m
t
发送给电动助力转向系统(eps),eps调整车辆姿态使车辆沿着目标轨迹行驶。
[0061]
本实施例的车道保持方法,在目标轨迹上选取3个近预瞄点,近目标转向角是所有近预瞄点转向角的加权和,这种情况下,即使某个近预瞄点受随机因素的影响偏离了目标轨迹,也能够通过其他几个没有偏离目标轨迹的近预瞄点对其进行修正,从而削弱随机因素对近目标转向角的影响,相对于单个近预瞄点而言,能够提高近目标转向角指向目标轨迹的准确性;同理,在目标轨迹上选取3个远预瞄点,相对于单个远预瞄点而言,能够提高远目标转向角指向目标轨迹的准确性,从而保证利用近、远目标转向角的加权和得到的最终目标转向角能够准确指向目标轨迹,利用该最终目标转向角对车辆进行转向控制,能够保
证车辆沿着目标轨迹行驶,提高控制稳定性。
[0062]
作为其他实施方式,还可以在目标轨迹上选取2个近预瞄点和2个远预瞄点,当然,为了提高车辆的控制稳定性,也可以在目标轨迹上选取3个以上的近预瞄点和3个以上的远预瞄点,这种情况下的最终目标转向角的计算过程与3个近预瞄点和3个远预瞄点类似,此处不再赘述。
[0063]
本实施例的车道保持方法,将车辆前进方向的车道中心线作为目标轨迹;作为其他实施方式,还可以根据实际路况进行目标轨迹的选择,例如当前车道为双行道且需靠右行驶时,选择车道中心线与右车道的中心线作为目标轨迹,此时除需对目标轨迹方程作适应性调整之外,最终目标转向角的计算过程均与将车道中心线作为目标轨迹时类似,这里不再赘述。
[0064]
本实施例的车道保持方法,通过求所有近预瞄点转向角的加权和得到近目标转向角,通过求所有远预瞄点转向角的加权和得到远目标转向角;作为其他实施方式,还可以先对所有近预瞄点转向角进行筛选,筛选出与其他近预瞄点转向角偏差最大的进行剔除,再对剩下的近预瞄点转向角求加权和得到近目标转向角,远目标转向角也可类似得到。
[0065]
本实施例的车道保持方法,通过求近目标转向角和远目标转向角两者的加权和得到最终目标转向角;作为其他实施方式,还可以在求得两者的加权和后,对加权和进行修正从而得到最终目标转向角。
[0066]
本实施例中,车辆由当前位置行驶到每个预瞄点所需要的转向角,根据车辆由当前位置行驶到每个预瞄点所需要的横向偏移量和转向角计算公式计算得到;车辆由当前位置行驶到每个预瞄点所需要的横向偏移量,根据车辆当前位置到每个预瞄点的纵向距离和已建立的目标轨迹方程得到;作为其他实施方式,车辆由当前位置行驶到每个预瞄点所需要的转向角、车辆由当前位置行驶到每个预瞄点所需要的横向偏移量均可以采用现有技术中的其他方法计算得到。
[0067]
车道保持方法实施例
[0068]
本实施例的基于多点预瞄的车道保持方法,与车道保持系统实施例中的基于多点预瞄的车道保持方法相同,此处不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1