一种物料运输车的制作方法
[0001]
本发明涉及物流、运输技术领域,特别涉及一种物料运输车。
背景技术:
[0002]
在建筑工地经常会有将建筑材料运送到各个施工位置的需求。目前,建筑工地的构件运输通常是采用人力搬运或塔吊运送。由于建筑构件体积大、重量重,采用人力搬运劳动强度很大,费时费力。而采用塔吊运输中构件有容易产生意外洒落或跌落的情况,带来安全隐患。此外,还又一些紧急情况,如基坑抢险运输,这时应尽量减少人工进入基坑,避免二次坍塌造成的人员伤亡。
[0003]
还有一种运输方式是采用小车运输,但是建筑材料的运输还有一个特殊性在于,材料的形态各异,大小不等,普通的厢式小车很难满足需求。因此,如何为建筑工地提供一种安全、省力、可适应不同形态构件的物料运输方式,成为目前亟待解决的一个问题。
技术实现要素:
[0004]
为了解决上述问题,本发明提供一种可以实现通风功能的储物柜。
[0005]
本发明的一种储物柜的技术方案如下:
[0006]
一种物料运输车,其特征在于,所述物料运输车包括无人驾驶控制模块、动力驱动模块、车体、置物架,所述无人驾驶控制模块和所述动力驱动模块设置于所述车体,所述动力驱动模块依据所述无人驾驶控制模块的控制指令驱动所述车身按规定路线行驶,所述置物架和所述车体可拆卸连接。
[0007]
优选的,所述无人驾驶控制模块控制所述物料运输车按规定路线行驶包括,控制所述物料运输车在固定车道内以第一速度行驶,控制所述物料运输车在非固定车道按预设的最佳行驶路线以第二速度行驶,所述第一速度大于所述第二速度。
[0008]
优选的,所述无人驾驶控制模块还包括无线通信模块,用于和控制中心或手持智能终端通信。
[0009]
优选的,所述物料运输车还包括摄像头用于辅助行驶,所述摄像头为两个分别设置于所述车体头部的两侧。
[0010]
优选的,所述物料运输车还包括位移传感装置,用于测量所述车体和障碍物的距离,所述位移传感装置为两个分别设置于所述车体头部的两侧。
[0011]
优选的,所述置物架包括支撑部和箱体,所述车体和所述支撑部卡扣连接。
[0012]
优选的,所述支撑部为支脚,在靠近端部位置设置有凹槽,所述车体设置有和所述凹槽配合的环扣,所述环扣通过连接部固定于所述车体。
[0013]
优选的,所述支撑部为可伸缩支腿。
[0014]
优选的,所述箱体的截面形状为五边形,所述箱体内部设置有可调整隔层,和/或所述箱体内部设置有防震橡胶板。
[0015]
优选的,所述箱体左右两侧和后侧均设置有门结构。
[0016]
本申请提供的物料运输车,可减少重体力劳动,减少人力成本。同时,采用小车运输可避免塔吊运输中构件意外洒落或跌落的可能,提高了建筑工地的安全性,减少人员运送危险。物料运输车可自动化作业,工作时长不受限制,提升工作效率。相比较轨道式运送方式,方便路径调整,方便避开障碍物。
附图说明
[0017]
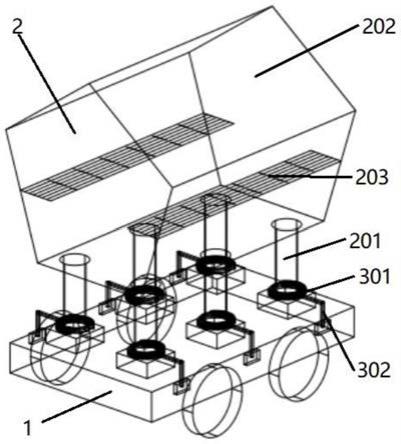
图1是本申请的一种物料运输车优选实施例的结构示意图;
[0018]
图2是图1实施例物料运输车的侧面视图;
[0019]
图3是图1实施例物料运输车的正面视图;
[0020]
图4是图1实施例中置物架的结构示意图;
[0021]
图5是图1实施例中环扣和连接部的结构示意图。
具体实施方式
[0022]
以下结合附图和具体实施例对本申请提出的物料运输车作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0023]
图1、图2、图3示出了本申请一较佳实施方式中的物料运输车,该物料运输车包括无人驾驶控制模块(未图示)、动力驱动模块(未图示)、车体1、置物架2。无人驾驶控制模块可以设置在车体1的任意位置,本申请对此不作限定。动力驱动模块和车轮连接,可根据无人驾驶控制模块的控制指令驱动车轮,进而使得物料运输车按规定路线行驶。
[0024]
本实施例物料运输车运用在建筑工地现场构件的运输中。首先需要对工地现场进行路径规划,根据工地现场布置图调整无人驾驶汽车的最佳行驶路线,避开障碍物。在固定建筑区域内可设置固定车道,车道宽为1米,无人驾驶控制模块控制物料运输小车在沿车道行驶,本实施例中物料运输车在固定车道内的速度可达到40公里/小时。而在非固定建筑物区域内,无人驾驶控制模块根据预设的最佳行驶路线控制物料运输车行驶,由于在非固定建筑区域内道路情况比较复杂,因此行驶速度应该比在固定车道内的速度有所减慢,为20公里/小时。
[0025]
虽然有固定车道和预设路线,但是在施工中难免会有各类障碍物出现,因此物料运输车还包括摄像头。摄像头可进行摄像用以辅助行驶,使车辆避让前方障碍物。在本实施例中,摄像头的数量为两个,安装在车头车牌两侧,在其他较佳实施例中摄像头数量及安装位置可根据需要调整,本申请对此不作限定。为了更好地控制物料运输车的行驶,本实施的物料运输车还包括位移传感装置,用于测量所述车体和障碍物的距离。本实施例中移传感装置的安装位置和摄像头一致,可测量车牌与障碍物的距离,及时调整车辆位置,避开工程现场障碍物,保持车距。传感器探测距离为30m,探测调整车辆距离为10m。在其他较佳实施例中,可以仅设置摄像头或位移传感装置中的一者。为了便于运程控制,无人驾驶控制模块还包括无线通信模块,用于和控制中心或手持智能终端通信。本实施例中安装了摄像头,可以在车控室和手机端显示车辆行驶情况,并可观看摄像头拍摄的实时画面,保障车辆和运输物品的安全。
[0026]
由于建筑工地现场路面平整度低,根据运输物品的不同,需要使用不同的运输置
物箱,因此置物架2和车体1采用可拆卸方式连接。置物架2如图4所示,包括支撑部201和箱体202。为了置物架2的运输安全,置物架2底部设置6条支腿作为支撑部201。由于置物箱运送物品自重大,单独使用时中间置物架2的2条支腿能更好的支撑置物架2底部。车体1和支撑部201卡扣连接,支腿在靠近端部位置设置有凹槽203,车体1设置有和凹槽203配合的环扣301。环扣301形状如图4所示,正好和支腿的凹槽203处扣紧。环扣301数量和支腿相同,通过连接部302固定于车体1的两侧。
[0027]
本实施例中支撑部201为可伸缩支腿,可根据需要上下升降。可调整高度分为6个,分别是:85cm,87.5cm,90cm,92.5cm,95cm,97.5cm,100cm,方便不同身高的工人取用,减少建筑工人重体力工作和反复下蹲弯腰造成的身体损伤。当工人装载时,置物架2提升至指定高度进行装载,当车辆运输和回收置物箱时,需要降低至运输高度。此时将置物架架腿伸缩到最短,完成置物架和物料运输车的安装后,才可以开始行驶。工人可选择远程手机操控车辆行驶、设置置物架高度和置物架与汽车脱卸安装工作。
[0028]
箱体202的截面形状为五边形,这样形状的箱体202底部宽度小于上部宽度,这样便于容纳更多的物品,并能匹配不规则形状的构件。箱体202的门为三开门,箱体两边和后侧均可开门,便于从不同位置进行操作。置物架内部四周可选择放置10cm、20cm、30cm厚的防震橡胶板,可根据货物数量调整。置物架内部还可设置可调整隔层203,方便堆放物品。
[0029]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1