一种足式机器人抬脚步态规划方法、控制器及足式机器人与流程
1.本发明属于机器人领域,尤其涉及一种足式机器人抬脚步态规划方法、控制器及足式机器人。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.地球上的大型陆生动物普遍为足式移动方式,山羊、岩羊等可在山岩、峭壁自由移动,这证实了足式移动方式具有强地形适应能力。受动物启发,足式机器人技术也开始蓬勃发展,其中越障能力是重中之重。目前足式机器人常见的步态规划方法有基于中央模式发生器的规划方法、基于弹簧负载倒立摆模型的规划方法、基于预设足端运动轨迹的规划方法,以及基于这些方法的混合规划方法等。发明人发现,以上方法在足式机器人抬脚时可能会发生踢到障碍物影响平衡甚至被障碍物绊倒的情况。
技术实现要素:
4.为了解决上述背景技术中存在的至少一项技术问题,本发明提供一种足式机器人抬脚步态规划方法、控制器及足式机器人,其通过控制摆动腿同速后撤或超速后撤,避免足端与障碍物发生碰撞。
5.为了实现上述目的,本发明采用如下技术方案:
6.本发明的第一个方面提供一种足式机器人抬脚步态规划方法。
7.一种足式机器人抬脚步态规划方法,采用同速后撤法,使摆动腿与支撑腿在前后方向的运动相关联,保证摆动腿相对于躯干的移动速度与支撑腿相对于躯干的移动速度相同,从而保证足式机器人在前进时摆动腿竖直抬起,避免踢到地面的立面影响平衡。
8.作为一种可选的实施方式,采用超速后撤法,使摆动腿的后撤速度超过支撑腿的蹬地速度,从而避免抬脚时被地面障碍立面的凸出部分压住而破坏平衡。
9.作为一种可选的实施方式,超速后撤法用速度描述:摆动腿的后撤速度=k*支撑腿的蹬地速度;其中,k大于1。
10.作为一种可选的实施方式,超速后撤法用位置描述:摆动腿的后撤位置=支撑腿的位置-抬脚结束后多后撤的距离与摆动相的预计时长的比值*进入摆动相后的计时时间。
11.作为一种可选的实施方式,摆动腿抬脚时的运动轨迹分为x轴轨迹和z轴轨迹,x轴轨迹向前为正,z轴轨迹为摆动腿在z轴的位置=迈步与高度与摆动相的预计时长的比值*进入摆动相后的计时时间。
12.作为一种可选的实施方式,进入摆动相后的计时时间大于或等于0,且小于或等于摆动腿的后撤时间。
13.作为一种可选的实施方式,从地面坐标系来看,摆动腿足端无水平初速度。
14.作为一种可选的实施方式,当足式机器人处于斜坡上时,摆动腿同样表现为竖直
抬脚。
15.本发明的第二个方面提供一种控制器。
16.一种控制器,其包括计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,该程序被处理器执行时实现如上述所述的足式机器人抬脚步态规划方法中的步骤。
17.本发明的第三个方面提供一种足式机器人。
18.一种足式机器人,其包括如上述所述的控制器。
19.与现有技术相比,本发明的有益效果是:
20.创新性提出一种足式机器人抬脚步态规划方法,研制了足式机器人抬脚步态规划系统,采用同速后撤法,使得摆动腿相对于躯干的移动速度与支撑腿相对于躯干的移动速度相同,从而保证足式机器人在前进时摆动腿竖直抬起,避免踢到地面的立面影响平衡;采用超速后撤法,使摆动腿的后撤速度超过支撑腿的蹬地速度,从而避免抬脚时被地面障碍立面的凸出部分压住而破坏平衡,解决了足式机器人在爬越楼梯时摆动腿容易踢到楼梯立面以及足式机器人抬脚时可能会发生踢到障碍物影响平衡甚至被障碍物绊倒的问题,提高了足式机器人运动的稳定性,适用于砾石地形、草地等其他可能在抬脚时绊倒腿足式机器人的情况。
21.本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
22.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
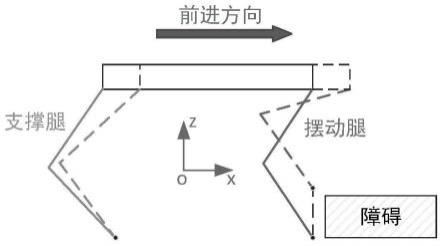
23.图1是本发明实施例的同速后撤法示意图;
24.图2是本发明实施例的机器人处于坡面时的同速后撤法示意图;
25.图3是本发明实施例的超速后撤法示意图。
具体实施方式
26.下面结合附图与实施例对本发明作进一步说明。
27.应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
28.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
29.实施例一
30.足式机器人在行走时,腿根据支撑状态分为支撑腿和摆动腿,支撑腿蹬地,足端后移推动躯干前进;摆动腿腾空前伸,为触地做准备。其中,摆动腿的摆动阶段按照足端在z轴(竖直向上为正)的运动方向分为上升阶段和下降阶段,上升阶段即为抬脚阶段。
31.本实施例的足式机器人抬脚步态规划方法,采用同速后撤法,使摆动腿与支撑腿在前后方向的运动相关联,保证摆动腿相对于躯干的移动速度与支撑腿相对于躯干的移动速度相同,从而保证足式机器人在前进时摆动腿竖直抬起,避免踢到地面的立面影响平衡。
32.如图1所示,摆动腿抬脚时的运动轨迹可分为x轴(向前为正)轨迹和z轴轨迹,同速后撤法的核心是保证摆动腿相对于躯干的移动速度与支撑腿相对于躯干的移动速度相同,即:
[0033][0034]
于是从地面坐标系来看,摆动腿足端无水平初速度。为摆动腿的后撤速度;为支撑腿的蹬地速度。
[0035]
对于z轴轨迹,采用以下方程中的任意一种均可:
[0036]
①
[0037]
②
[0038]
③
[0039]
其中,z
max
为迈步高度,t
swing
为摆动相的预计时长,t为进入摆动相后的计时时间,0≤t≤t
swing
。p
z_swing
为摆动腿在z轴的位置。
[0040]
得到足端轨迹后,使用足端逆运动学方程,将x轴和z轴坐标换算为关节转角,再通过关节伺服实现运动。逆运动学方程由腿部机械结构决定,因腿而异。具体地,该运动在xoz平面内通过规划x轴和z轴的足端轨迹,然后经过逆运动学方程换算至关节角度,然后通过伺服关节角度实现。
[0041]
在躯干坐标系中,摆动腿和支撑腿后撤速度相同,支撑腿后撤推动躯干前进,摆动腿后撤避免碰撞障碍。从地面坐标系来看,摆动腿末端是竖直抬起的。
[0042]
当足式机器人处于斜坡上时,x轴和z轴轨迹规划方式与上述相同,但此时的x轴不再与前进方向相同,而是旋转至水平,z轴竖直向上。该旋转角度为机器人的俯仰角,可由安装于机器人本体的惯性测量单元或其他传感器测出。此时摆动腿表现为竖直抬脚,如图2所示。
[0043]
当地面障碍立面存在凸起时,可采用超速后撤法。该方法可用速度描述或位置描述,如图3所示。在躯干坐标系中,摆动腿的后撤速度大于支撑腿的后撤速度。从地面坐标系来看,摆动腿末端是边抬起边后撤的。
[0044]
在具体实施中,摆动腿的后撤值可通过增加速度或增加位移量实现。
[0045]
速度描述方程为:
[0046][0047]
其中,k》1,该参数可根据实际情况进行调整。为摆动腿的后撤速度;为支撑腿的蹬地速度。
accessmemory,ram)等。
[0063]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1