可调整轴距自驱动拖台车辆单元的制作方法
1.本公开涉及重型车辆(例如卡车和建筑装备),尤其涉及自驱动拖台车辆(self-powered dolly vehicles),其包括被构造成用于为拖台车辆的各种功能(例如转向、推进和制动)提供动力的能量源。尽管本发明将主要针对半挂车车辆和卡车来描述,但本发明不限于这种特定类型的车辆,而是也可用在其它类型的车辆中。
背景技术:
2.半挂车车辆通常包括牵引车,该牵引车被布置成用于经由牵引座连接部(fifth wheel connection)牵引挂车单元。为了扩展半挂车车辆的货物运输能力,可以在车辆组合体中添加拖台车辆单元,从而允许同一个牵引车牵引额外的挂车单元。传统的拖台是无动力车辆单元,它被设计成连接到牵引车单元、卡车或具有强大牵引动力的原动机车辆。
3.最近已经提出了包括车载能量源(例如电机)的拖台车辆和具有一个或多个转向桥的拖台车辆。这样的拖台车辆可以为车辆组合体提供额外的动力,从而减少对原动机车辆施加的牵引动力需求。电动拖台车辆还可以减少车辆组合体的整体燃料消耗,因为它们提供了与传统柴油发动机驱动的牵引车相比的一定程度的混合。转向桥拖台车辆可以进一步用于改进车辆组合体的转向,例如,在通过急转弯时。
4.us 10518831 b2涉及自驱动可转向拖台车辆。公开了用于控制拖台车辆以便例如通过急转弯的方法。还讨论了根据拖台车辆即将行驶的车辆路线来控制推进操作和再生制动操作的方法。
5.由于对拖台车辆上的可用空间的限制,目前的自驱动拖台车辆在能量存储容量方面受到限制。需要进一步开发自驱动拖台车辆,以便扩展自驱动拖台车辆可以被使用的应用范围。
技术实现要素:
6.本公开的目的是提供能够适应于不同类型的运输任务的更具通用性的拖台车辆。该目的至少部分地通过具有可调整轴距的自驱动拖台车辆单元来实现。该拖台车辆单元包括:前桥,其被布置成支撑一对可转向前轮;和后桥,其被布置成支撑一对后轮。该拖台车辆还包括:牵引座连接部,其用于牵引挂车车辆;牵引杆附接机构,其被布置成用于保持牵引杆;以及框架结构,其被布置成用于对前桥和后桥以距彼此可变的轴距距离进行支撑,其中,该框架结构被布置成锁定在第一轴距距离位置处和第二轴距距离位置处。
7.这样,当需要例如承载额外的能量存储容量时,可以将拖台车辆延长到较长的轴距,而当希望作为传统拖台车辆工作时,可以将该拖台车辆缩短到较短的轴距。这样,同一个车辆单元可以被配置成执行较短距离运输任务以及需要更多能量的较长距离运输任务。
8.根据各方面,牵引杆附接机构被布置成联接到牵引杆和从牵引杆脱离。这意味着可以根据需要向车辆单元添加牵引杆。有些运输任务可能不需要牵引杆,因此可以移除牵引杆,以免妨碍操作。如果希望作为传统拖台车辆单元工作(即,用于牵引附加的挂车),则
可以向拖台车辆添加牵引杆。取决于运输任务的具体情况,也可以使用或多或少先进的牵引杆。牵引杆的联接和脱离可以自动进行,或者牵引杆的联接和脱离可以由维修人员手动进行。
9.根据各方面,所述自驱动拖台车辆单元包括托架,该托架被构造成:当框架结构被锁定在第一轴距距离位置处时,该托架以可释放方式保持第一能量源,而当框架结构被锁定在第二轴距距离位置处时,该托架以可释放方式保持第二能量源。与第一能量源相比,该第二能量源与更大量的存储能量相关联。这种多功能托架系统允许拖台车辆保持不同尺寸(和类型)的能量存储单元(例如不同尺寸的蓄电池)或不同数量的并联或串联连接的蓄电池模块。该车辆单元还可以被构造成保持蓄电池和燃料电池二者或其组合。
10.根据各方面,所述框架包括:前部和后部,它们相对于彼此以可滑动的方式布置;以及夹持机构,其被布置成以可释放方式将所述前部和后部相对于彼此保持就位。这种布置允许以方便的方式调节轴距。该夹持机构允许将框架结构固定在所期望的轴距距离处。该夹持机构可以布置成响应于从拖台车辆上的控制单元发出的控制信号而被自动地释放和接合。
11.根据各方面,所述自驱动拖台车辆单元包括液压致动器,该液压致动器被布置成响应于控制信号而使框架结构延长和缩短。该液压致动器允许所述框架结构自动地延长和缩短,以获得不同的轴距长度。与齿条-小齿轮机构相组合的电机也可以用于使所述框架结构延长和缩短。
12.根据各方面,前轮和后轮中的至少一个是驱动轮,并且前轮和前轮中的至少另一个包括制动器。驱动轮和带有制动器的车轮被布置成响应于控制信号而使所述框架结构延长和缩短。驱动轮和带有制动器的车轮构成上述液压致动器的替代或补充。
13.根据各方面,所述自驱动拖台车辆单元包括控制单元,该控制单元被布置成控制所述自驱动拖台车辆单元的操作。该控制单元可以被布置成根据所配置的运输任务来确定能量存储需求,并根据能量存储需求将所述框架结构调节到第一轴距距离位置或第二轴距距离位置。该控制单元还可以被布置成根据所配置的运输任务来确定能量存储需求,并根据该能量存储需求在具有不同能量存储容量的第一能量源和第二能量源之间进行选择。这样,拖台车辆单元的能量存储容量可以适应于当前的运输任务,从而提供了更具通用性的拖台车辆单元,该拖台车辆单元与已知的自驱动可转向拖台车辆单元相比,可以用于更多样化的任务。
14.本文中还公开了一种用于操作具有可调整轴距的自驱动拖台车辆单元的方法。该方法包括:获得与要执行的运输任务相关的信息,并根据该运输任务来配置所述可调整轴距。因此,与已知的自驱动可转向拖台车辆单元相比,提供了一种可以用于较宽范围的运输任务的、更具通用性的拖台车辆单元。
15.根据各方面,该方法还包括:确定执行该运输任务的能量存储需求;以及根据该能量存储需求在具有不同能量存储容量的第一能量源和第二能量源之间进行选择。这样,拖台车辆单元的能量存储容量适应于当前的运输任务,这是一个优点,因为可以处理更多的运输任务,同时在需要较少能量的运输任务期间不携带过剩的能量存储。还可以根据运输任务来选择能量存储的类型,例如电能存储单元或燃料电池设备。
16.根据各方面,所述方法进一步包括将所选择的能量源安装到拖台车辆的框架结
构。这种安装既可以是自动的或手动的。
17.本文中进一步公开了一种用于操作具有可调整轴距的自驱动拖台车辆单元的方法,其中,所述可调整轴距被布置成响应于控制信号而被自动地调整。该方法包括包括重复地执行以下步骤:释放前桥的一对车轮上的制动器;生成控制信号以将所述可调整轴距延长到第一轴距;接合所述前桥的一对车轮上的制动器;释放后桥的一对车轮上的制动器;以及生成控制信号以将所述可调整轴距缩短到第二轴距。
18.这样,该拖台车辆能够仅使用其可调节的框架结构和车轮制动器而向前移动。如果主推进机构发生故障,则可以使用这种推进方法将拖台车辆(以及可能的被牵引的挂车单元)从危险位置移开。这种类型的“蜗杆传动”代表冗余的推进机构,这是一个优点。
19.还公开了与上述优点相关联的计算机程序、计算机可读介质、计算机程序产品、控制单元和车辆。
20.通常,除非本文中另有明确定义,否则权利要求书中使用的所有术语应根据它们在本技术领域中的普通含义进行解释。除非另有明确说明,否则对“一/一个/该元件、器械、部件、装置、步骤等”的所有引用均应开放地解释为指所述元件、器械或部件、装置或步骤等的至少一个实例。除非明确说明,否则本文中公开的任何方法的步骤不必按照所公开的确切顺序执行。当研究所附权利要求书和以下描述时,本发明的进一步的特征和优点将变得明显。本领域技术人员会认识到,在不脱离本发明的范围的情况下,本发明的不同特征可以组合以产生除了下文中描述的实施例之外的实施例。
附图说明
21.参考附图,下面是作为示例引用的本发明实施例的更详细描述。
22.在这些图中:
23.图1至图3示意性地示出了本文中公开的拖台车辆的一些示例性的使用案例;
24.图4示出了车辆控制系统;
25.图5示出了长途运输任务期间的示例性的车辆组合体;
26.图6示出了终点站运输任务期间的示例性的拖台车辆;
27.图7示出了执行长途运输任务的示例性的拖台车辆;
28.图8a至图8b示意性地示出了用于拖台车辆蜗杆传动的方法;
29.图9示意性地示出了自驱动拖台车辆的细节;
30.图10a至图10d示出了示例性的框架结构;
31.图11a至图11d示出了具有可调整轴距的示例性的拖台车辆;
32.图12是示出了方法的流程图;
33.图13示意性地示出了控制单元;并且
34.图14示出了示例性的计算机程序产品。
具体实施方式
35.现在将在下文中参考附图更全面地描述本发明,附图中示出了本发明的某些方面。然而,本发明可以以许多不同的形式实施,且不应被解释为限于本文中阐述的实施例和方面;相反,这些实施例是以示例的方式提供的,以便本公开将是彻底的和完整的,并且将
向本领域技术人员充分传达本发明的范围。在整个说明书中,相同的附图标记表示相同的元件。
36.应当理解,本发明不限于本文中所描述的和附图中示出的实施例;相反,本领域技术人员将认识到,在所附权利要求书的范围内可以进行许多修改和变型。
37.图1示出了用于货物运输的示例性的车辆组合体100。车辆组合体100包括被支撑在车轮上的卡车或牵引车辆110,这些车轮中的至少一些车轮是驱动轮115。卡车110被构造成以已知的方式牵引第一挂车单元120。为了扩展该车辆组合体的货物运输能力,拖台车辆130可以经由牵引杆135连接到第一挂车120的后部。然后,该拖台车辆可以牵引第二挂车140。
38.拖台车辆130传统上是一种被动车辆,它不包括驱动轴或可转向桥,并且具有相对短的轴距d1。最近已经表明,自驱动可转向拖台车辆可以提供增加的燃料效率和可操纵性。这种类型的自驱动拖台车辆包括车载能量源和至少一对驱动轮。
39.例如,如果在该拖台车辆中安装有被布置成用于再生制动的电机,则获得了增加的燃料效率。即使该牵引车辆仅包括传统的柴油发动机而没有车载电动混合动力,该车辆组合体也有效地变成混合动力车辆。下面将结合例如图9来更详细地讨论这种类型的自驱动拖台车辆的示例。
40.卡车110和自驱动可转向拖台车辆130二者都可以包括电机,所述电机用于推进和/或用于再生制动(用于使车辆单元减速,同时收集能量)。自驱动车辆单元还包括相应的能量源。能量源通常是蓄电池、超级电容器、燃料电池或其它被布置成用于存储电能的设备。然而,能量源还可以包括机械能量存储设备,例如用于气动机械的弹簧和压缩空气罐。还可以使用不同类型的能量源的组合。在这种背景下,用于存储汽油或柴油的传统燃料箱当然也可以被视为能量源。
41.本公开涉及自驱动拖台车辆的额外用途,其中,可以将拖台车辆改造(re-purposed)为从传统的用于牵引额外的挂车单元的用途变成用于较短距离或较长距离运输任务的原动机。
42.图2示出了包括自驱动拖台车辆130的车辆组合体200。该拖台车辆现在被配置为原动机,并且在没有来自其它车辆单元的辅助的情况下牵引挂车单元120。拖台车辆130包括前桥210和后桥220。这两个车桥之间的距离通常被称为车辆单元的轴距。图2中的拖台车辆130的轴距d1相对短,对应于传统拖台车辆单元130的通常轴距,例如图1中所示的轴距。该轴距虽然不是很大,但是仍然允许安装能量源,这使得该拖台车辆能够在较短的运输任务期间操纵挂车单元120。图2所示的自驱动拖台车辆130的使用案例的一个示例是在货运终点站进行操纵,下文将结合图6更详细地讨论这一点。较长的车辆组合体(例如图1所示的车辆组合体100)可以例如将其拖台车辆释放在繁忙的货物运输终点站之外。然后,拖台车辆130可以将该挂车操纵至终点站内的装载区等,从而提供更有效的卸载和/或装载操作。然后,该拖台车辆可以自动联接到某个其它挂车,并将该挂车牵引回到正在繁忙的货物运输终点站外等待的卡车。请注意,图1所示的牵引杆135已被从图2中的拖台车辆单元上拆下,这是因为手头的运输任务不需要牵引杆135。图2中的拖台车辆130没有足够的轴距来承载较大的能量源,因此将很可能无法执行较长距离的运输任务。
43.本文中公开的技术的核心构思是具有可调整轴距的拖台车辆。这意味着能够根据
要执行的当前运输任务的需求来调节拖台车辆的轴距。较大的轴距允许安装较大的能量源(例如较大的蓄电池),从而使拖台车辆能够执行较长的有更高能量需求的运输任务。另一方面,较小的轴距允许以更传统的方式使用拖台车辆130。这样,扩展了该拖台车辆可以被使用的应用范围,这是一个优点。在本文中,当结合车辆的轴距使用时,相对术语“小”和“大”应被解释为与车辆长度相关。与较小的轴距相比,大轴距具有在车桥之间的更长距离。与用于牵引半挂车等的牵引卡车相比,传统的拖台车辆通常具有较小的轴距。
44.图3示意性地示出了车辆组合体300,其中拖台车辆单元130的轴距d2已经被延长。这允许拖台车辆130携载足够的能量存储设备,以例如将挂车单元120牵引较长的距离(例如在两个货运终点站之间)。图1中所示的牵引杆130在图3中也已被断开,因为它在该拖台车辆用作原动机时不起任何作用。
45.牵引车辆110和可转向拖台车辆130都包括控制单元,下面将结合图9更详细地讨论控制单元。这些控制单元可以根据分层功能架构来布置,其中,一些功能可以被包括在交通状况管理(tsm)层中,而一些其它功能可以被包括在车辆运动管理(vmm)层中。
46.通常,tsm层以例如10秒的时间范围规划车辆操作。例如,该时间范围对应于车辆通过弯道(即,从直线行驶过渡到进入弯道,然后再次离开弯道)所需的时间。tsm层连续地向vmm层请求所期望的加速度曲线(acceleration profiles)和曲率曲线(curvature profiles)。vmm层以大约1秒的时间范围操作,并将这些加速度曲线和曲率曲线连续转换为控制命令(有时被称为请求),以用于车辆上的各种运动支持设备(msd)功能,即,vmm层尤其执行msd协调。
47.图4示意性地示出了示例性的车辆控制堆栈400,在该车辆控制堆栈400中并入了各种车辆控制功能。牵引车110包括一个堆栈,而拖台车辆130包括另一个堆栈。这两个堆栈经由接口410连接,从而允许在这两个堆栈之间交换控制消息和状态信息。包括实现tsm功能和vmm功能二者的控制单元的卡车110然后可以充当主车(master),而车辆组合体中的一个或多个拖台车辆在从模式(slave mode)下运行,在该从模式下,所述一个或多个拖台车辆受到主模式控制单元控制。因此,尽管拖台车辆130中的控制单元可以包括独立的tsm功能(tsm b),但该功能在图4中被至少部分地禁用,因为tsm功能由卡车110中的主控制单元执行。
48.当自驱动拖台车辆130连接到原动机时(例如在图1所示的车辆组合体100中),该自驱动拖台车辆130可以在从模式配置下工作。当处于从模式时,tsm功能被禁用,并且拖台车辆130经由接口410从用作主车的原动机110中的控制堆栈接收控制命令。然而,当该拖台车辆与所述原动机断开连接并且在独立操作模式下操作时(如图2和图3所例示的),则tsm功能(tsm b)被启用,以便该拖台车辆能够独立于卡车110操作。这种类型的独立操作可以包括自主执行运输任务。用于自主行驶的控制功能通常是已知的,因此在本文中将不再详细讨论。
49.每个控制堆栈以通信方式联接到一个或多个车载能量源440、450。因此,所述控制单元知道能量存储设备中的能量存储容量和当前能量的量。例如,如果能量源是蓄电池,则控制单元知道能量源420、430的当前荷电状态和能量存储容量。
50.根据一些方面,拖台车辆的控制单元可以控制拖台车辆的轴距构型。例如,如果确定该拖台车辆需要额外的能量存储来执行当前的运输任务,则可以延长轴距,以便适应这
种额外的能量存储。如果运输任务包括用作传统的拖台车辆来牵引额外的第二挂车单元(例如图1所示),则可以减小拖台车辆的轴距。
51.拖台车辆130可以包括多个车载传感器,以便于自主操作。此类传感器例如可以包括雷达传感器、基于视觉的传感器、激光雷达和全球导航卫星系统接收器(gnss)。传感器数据被布置成用于提供给拖台车辆中的控制单元。这样的传感器系统通常是已知的,因此本文中将不更详细地讨论。
52.此外,车辆控制堆栈可以包括到远程服务器或处理单元450的无线连接440。该远程服务器或处理器450可以又连接到远程网络或形成远程网络的一部分。由车辆控制堆栈400传送到远程服务器或处理单元450的信息可以包括与该车辆组合体要执行的运输任务相关的信息。一个或多个控制单元110、130然后可以估算执行该运输任务所需的所需能量存储容量。拖台车辆的控制单元可以基于该信息确定需要延长轴距。
53.例如,拖台车辆130中的控制单元可以执行以下操作序列。该车辆单元首先接收运输任务描述。例如,可以经由无线链路440从远程服务器450或从以通信方式连接到该拖台车辆的控制塔接收该描述。该任务信息包括关于要执行的动态行驶任务和预期的操作设计领域(odd)的知识。然后,该拖台车辆中的控制单元执行任务规划,并因此确定对能量存储容量的需求,例如,根据给定的规格完成该运输任务所需的蓄电池尺寸。如果拖台车辆的控制单元在从模式下操作,则拖台车辆的控制单元将通知主控制单元关于该拖台车辆的控制单元已经确定的能量存储需求。如果拖台车辆的控制单元改为在主模式下操作并且要自行执行该运输任务,则拖台车辆的控制单元将自身驱动至它能够移除牵引杆135的位置。拖台车辆中的vmm然后修改拖台车辆的轴距,以便能够适应于任务长度和对能量源尺寸的需求。实际上,这意味着底盘框架梁未被锁定,因而车辆长度可以延长。下面将结合图10a至图10d讨论该操作的一些示例。当达到所期望的轴距时,底盘框架结构就被锁定。然后,将与对能量存储容量的需求相对应的能量源附接到拖台车辆。然后,拖台车辆可以自行行驶至例如挂车的位置,通过经由牵引座连接部将其自身附接到挂车来搭载挂车,然后启动该运输任务。
54.图5示出了长途运输任务的示例500。那么,卡车110充当主车,并牵引第一挂车单元120。自驱动拖台车辆单元130在从模式下运行,并牵引第二挂车140。拖台车辆130经由其牵引座连接部连接到第二挂车,并且经由其牵引杆连接部连接到第一挂车。在这种情况下,该拖台的轴距被锁定在第一距离d1处。这意味着该拖台车辆的框架结构被锁定在第一轴距距离位置处,该框架结构被布置成用于对前桥和后桥以距彼此可变的轴距距离进行支撑。
55.图6示出了另一个示例运输任务600。这里,拖台车辆130作为主车操作,并且自主地沿着轨道610将挂车单元120操纵到装载区620。一旦挂车120已经在装载区620被装载,拖台车辆就例如可以接收涉及更长距离运输的新运输任务。然后,拖台车辆130可以调节其轴距,搭载一个或多个附加的蓄电池单元630,并且根据运输任务的规范将挂车120牵引到其目的地。作为另一示例,拖台车辆130可以在卸载之后停放挂车120,然后搭载另一挂车640,以便执行某些其它运输任务。
56.根据一些方面,拖台车辆130是还包括内燃机的混合动力车辆。在这种情况下,拖台车辆130还可以搭载一个或多个燃料箱650,从而允许拖台车辆130执行更长的长途运输任务。
57.图7示出了另一个示例700,其中,拖台车辆单元130正在执行长途运输任务。然后,该拖台车辆已延长其轴距d2,以便能够承载更多的能量存储器630。这意味着该拖台车辆的框架结构被锁定在第二轴距距离位置处,该框架结构被布置成用于对前桥和后桥以距彼此可变的轴距距离进行支撑。
58.因此,有利的是,该拖台单元被布置成调整其轴距,以便携带所需数量和类型的能量存储单元630,以用于短途运输任务或较长的运输任务。
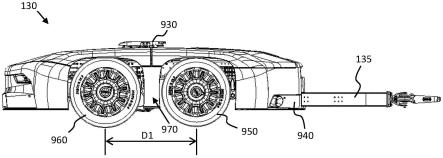
59.为了总结,还参考图9和图11a至图11d,本文中公开了一种具有可调整轴距的自驱动拖台车辆单元130。轴距是拖台车辆130的前桥210与后桥220之间的距离,前桥210被布置成用于支撑一对可转向前轮950,后桥220被布置成用于支撑一对后轮960。拖台车辆130包括用于牵引挂车车辆120、140的牵引座连接部930。拖台车辆130还具有牵引杆附接机构940,该牵引杆附接机构940被布置成用于保持牵引杆135。然而,应当理解,该牵引杆不必总是附接到牵引杆附接机构940(如图11d中所例示的)。根据某些方面,牵引杆附接机构940可以被布置成联接到牵引杆135以及从牵引杆135脱离。这种联接和脱离能力允许该拖台车辆仅在需要时(即,当希望牵引该拖台车辆时)才配备有牵引杆。牵引杆附接机构940可以被布置成自动联接到牵引杆135以及与牵引杆135脱离。因此,拖台车辆130可以使自身行驶至牵引杆被存放的位置,联接到牵引杆135,然后执行涉及使用牵引杆的运输任务。当运输任务完成时,该拖台可以将牵引杆135返回到牵引杆存放位置。
60.拖台车辆130还包括框架结构970,该框架结构970被布置成用于对前桥210和后桥220以距彼此可变的轴距距离d1、d2进行支撑。这种可调节的轴距是本公开的关键,因为它允许使拖台车辆适应于不同类型的运输任务。框架结构970布置成被锁定在第一轴距距离位置处和第二轴距距离位置处。当然,该框架结构可以布置成被锁定在不止两个位置处,并且这两个位置不必对应于预定的轴距。
61.图10a和图10b示意性地示出了框架结构970的第一示例。该示例的框架结构包括:前部1010和后部1020,它们相对于彼此以可滑动方式布置;以及夹持机构1030,该夹持机构1030被布置成以可释放方式将所述前部和后部相对于彼此保持就位。因此,为了调节轴距,可以释放夹持机构1030,然后可以将该框架结构延长或缩短,之后,用所述夹持机构将该框架结构再次锁定就位。所述夹持机构允许将该框架结构固定在所期望的轴距距离处。所述夹持机构可以布置成响应于从拖台车辆上的控制单元发出的控制信号而被自动释放和接合。图10a示出了延长的轴距构型,而图10b示出了缩短的轴距构型。
62.图10c和图10d示出了另一示例,其中,前部1010和后部1020被包括在伸缩装置中。然后,后部梁沿着在所述前部中形成的轨道移动,从而能够自由调节轴距。也提供了一种夹持机构,通过该夹持机构,能够将所述框架结构锁定在给定的轴距处。图10c示出了延长的轴距构型,而图10b示出了缩短的轴距构型。
63.根据一些方面,自驱动拖台车辆单元130包括液压致动器,该液压致动器被布置成响应于控制信号而使框架结构970延长和缩短。在图10a至图10d的示例中,所述夹持机构首先被释放,然后使用该液压致动器来调节前部1010和后部1020的相对位置。
64.根据一些其它方面,前轮950和后轮960中的至少一个是驱动轮,并且前轮950和后轮960中的至少另一个包括制动器。然后,这些驱动轮和带有制动器的车轮被布置成响应于控制信号而使框架结构970延长和缩短。这样,该拖台车辆的推进功能可以用于延长和缩短
该拖台车辆的可调节轴距。
65.用于使框架结构(例如框架结构970)延长和缩短的其它示例性机构包括:在该拖台的每个车轮处布置电机和车轮制动器;为电机提供齿条-小齿轮机构以使框架结构延长和缩短;以及只允许维修人员进行手动延长和缩短。
66.前轮对950和后轮对960可以由电机驱动,其中每个车轮都被布置成由各自的电机驱动。替代地,一对车轮可以由单个电机通过差速器驱动。这些电机通常也被布置成用于再生制动。
67.图9所示的示例性的自驱动拖台车辆单元130还包括控制单元901,该控制单元901被布置成控制自驱动拖台车辆单元130的操作。如上文结合图4所讨论的,该控制单元901可以被配置成处于主模式或处于从模式,在该主模式下,拖台车辆以独立自主的方式操作,在该从模式下,拖台车辆依靠从外部主控制单元接收的外部控制信号来用于其主要功能。
68.根据一些方面,控制单元901可以被布置成根据所配置的运输任务来确定能量存储需求,并根据该能量存储需求将框架结构970调节到第一轴距距离位置或调节到第二轴距距离位置。控制单元901还可以被布置成根据所配置的运输任务确定能量存储需求,并根据该能量存储需求在具有不同能量存储容量的第一能量源和第二能量源之间进行选择。
69.如上面结合图6所讨论的,自驱动拖台车辆单元130还可以包括托架,该托架被构造成:当框架结构970被锁定在第一轴距距离位置处时,该托架以可释放方式保持第一能量源,而当框架结构960被锁定在第二轴距距离位置处时,该托架以可释放方式保持第二能量源,其中,与第一能量源相比,第二能量源与更大量的存储能量相关联。这意味着该拖台车辆能够根据要执行的运输任务而配备有一定量的能量存储。对于较短距离的任务,可能需要较少量的能量,而更长途的运输任务可能需要额外的能量存储。如上文所提到的,这种能量存储还可以包括燃料箱和其它类型的能量源。因此,根据各方面,第一能量源包括电能存储器、燃料电池或燃料箱中的任一种,并且第二能量源包括电能存储器、燃料电池或燃料箱中的任一种。
70.在某些情况下,可以为拖台车辆130配置有软件和硬件以自主搭载所需的能量源,或者可以根据服务人员的需要将能量源手动附接到该拖台车辆。
71.图11a至图11d示出了根据上述讨论的具有可调整轴距的自驱动拖台车辆单元130的示例。图11a至图11b示出了当轴距已经缩短到轴距d1时的拖台车辆130。例如,当拖台车辆作为传统的拖台车辆运行时(即,如图1中所例示的),该操作模式可能是合适的。该拖台车辆130还具有附接至牵引杆附接机构940的牵引杆135。该牵引杆可以在不需要时被释放。图11c至图11d示出了当轴距已经延长到轴距d2时的拖台车辆130。这种延长的构型允许拖台车辆130携载额外的能量源,例如用于长途运输任务的额外的蓄电池组和/或燃料箱。
72.图12是示出了总结上述讨论的方法的流程图。图12示出了用于操作具有可调整轴距d1、d2的自驱动拖台车辆单元130的方法。该方法包括:获得s1与要执行的运输任务相关的信息;以及根据该运输任务配置s2所述可调整轴距d1、d2。
73.根据一些方面,该方法进一步包括:确定s3执行该运输任务的能量存储需求;以及根据该能量存储需求在具有不同能量存储容量的第一能量源和第二能量源之间进行选择s4。
74.根据一些方面,该方法还包括将所选择的能量源安装s5到拖台车辆130的框架结
构970。
75.图8a和图8b示出了一种推进方法,该推进方法可以由具有可调节轴距的拖台车辆(例如本文中讨论的拖台车辆)实现。这种推进方法可以被称为拖台车辆蜗杆传动。参考图8a,图8a在x轴上以米为单位示出了拖台车辆位置并且在y轴上以秒为单位示出了时间,拖台车辆130可以通过如下方式向前移动:首先锁定到后桥车轮(即,对后桥车轮施加制动),然后释放前桥车轮上的制动以将前桥车轮设置在自由滚动状态下。通过延长轴距,前桥被向前推动。然后,通过接合车轮制动器而锁定前桥车轮,并且通过释放车轮制动器而将后桥车轮置于自由滚动状态下。然后,可以通过减小轴距(即,通过使框架结构缩短)而将后桥朝向前桥拉。然后重复该过程,于是车辆组合体缓慢向前移动。轴距的延长和缩短可以通过如上文结合图10a至图10d讨论的轮端电机和/或液压设备来实现。
76.当然,同样的方法也可以通过反转图8a所示的步骤而向后移动。
77.总之,示出了一种用于操作包括可调整轴距d1、d2的自驱动拖台车辆单元130的方法,其中,可调整轴距被布置成响应于控制信号而被自动调整。该方法包括重复地执行以下步骤:释放sx1前桥一对车轮950上的制动器;生成sx2控制信号以将可调整轴距延长到第一轴距d2;接合sx3所述前桥的一对车轮950上的制动器;释放sx4后桥的一对车轮960上的制动器;以及生成sx5控制信号以使可调整轴距缩短到第二轴距d1。
78.图9示出了所公开的自驱动可转向拖台车辆130的各个方面。拖台车辆130包括可转向前桥210,但可转向前桥不是必需的,也可以使用固定式前桥。尽管鼓式制动器或减速器同样可行,但该特定拖台车辆还包括一组行车制动器910(这里被示出为盘式制动器)。该拖台车辆还包括电机(em)920和相关的电能存储器(ess)925,这意味着该拖台是自驱动的,并且能够在有或没有卡车或原动机车辆110辅助的情况下使自身以及一个或多个被牵引的挂车移动。电机920既可用于推进,也可用于再生制动。推进会消耗能量源925,而再生制动补充该能量源925。替代地,可以在每个车轮处都布置电机以提供推进和制动。
79.该拖台车辆可以经由牵引杆连接部940连接到卡车或其它牵引车辆单元。挂车可以经由牵引座连接部930连接到该拖台。
80.控制单元901布置在该拖台车辆上,并且被配置成控制该拖台车辆上的各种msd,即制动器、电机、悬架和转向。控制单元实现上述类型的vmm功能,并且能够根据操作场景被配置为处于主模式或处于从模式。该控制单元还控制拖台车辆的可调节框架结构970。
81.该拖台车辆还可以包括被配置成用于测量轮速度的车轮速度传感器ws1-ws4。这使控制单元901能够使用行车制动器和电机对车轮执行细粒度的滑移控制。例如,拖台单元上的控制单元901可以从传感器或从其它控制单元接收车辆状态数据(包括车辆速度),并基于该速度根据sae j670(sae车辆动力学标准委员会,2008年1月24日)将车轮滑移率确定为:
[0082][0083]
其中,r是以米为单位的有效车轮半径,ω是从车轮速度传感器获得的车轮角速度,v
x
是车轮的纵向速度(在车轮坐标系中)。
[0084]
自驱动拖台车辆130还可以包括力传感器和惯性测量单元(imu),该力传感器和惯性测量单元被配置成监测和/或估计作用在该拖台车辆上的力。这些力可以包括纵向力f
x
、
横向力fy和力矩mz。
[0085]
图13以多个功能单元示意性地示出了根据本文中公开的讨论和方法的实施例的控制单元901的部件。该控制单元901可以例如以vmm单元的形式被包括在车辆130中。使用能够执行存储在计算机程序产品(例如为存储介质1330的形式)中的软件指令的、适当的中央处理单元cpu、多处理器、微控制器、数字信号处理器dsp等中的一个或多个的任意组合来提供处理电路1310。处理电路1310还可以被设置为至少一个专用集成电路asic或现场可编程门阵列fpga。
[0086]
特别地,处理电路1310被构造成使控制单元901执行一组操作或步骤,例如结合图10讨论的方法。例如,存储介质1330可以存储该组操作,并且处理电路1310可以被配置成从存储介质1330检索该组操作,以使控制单元901执行该组操作。该组操作可以作为一组可执行指令来提供。因此,处理电路1310由此被布置成执行本文所公开的方法。
[0087]
存储介质1330还可以包括永久存储器,例如,该永久存储器可以是磁存储器、光学存储器、固态存储器或甚至远程安装的存储器中的任一种或其组合。
[0088]
控制单元901可以该包括用于与至少一个外部设备通信的接口1320。因此,接口1320可以包括一个或多个发射器和接收器,包括模拟和数字部件以及适当数量的用于有线或无线通信的端口。
[0089]
处理电路1310控制控制单元901的一般操作,例如通过向接口1320和存储介质1330发送数据和控制信号,通过从接口1320接收数据和报告,以及通过从存储介质1330检索数据和指令。为了不模糊本文中提出的构思,省略了控制节点的其它部件以及相关的功能。
[0090]
图14示出了携载计算机程序的计算机可读介质1410,该计算机程序包括程序代码组件1420,该程序代码组件1420用于当所述程序产品在计算机上运行时执行例如图12中所示的方法。该计算机可读介质和代码组件可以一起形成计算机程序产品1400。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1