一种集成式多足机器人
1.本发明涉及一种集成式多足机器人,属于移动机器人技术领域。
背景技术:
2.当前移动机器人的运动机构主要采用轮式机构、履带式机构、足式(或腿式)机构以及它们的复合机构等形式。然而,轮式机器人难以充分满足复杂环境条件下的应用需求,而且越障方面的表现极差。履带式机器人有较强的环境适应能力,但是能耗相当的大,使用范围也相当有限。因此,足式机器人就逐渐凸显出其优越性,对环境的要求较低,有较强的越障能力,能耗适中,但是运动控制方面具有一定的复杂性。
3.随着移动机器人技术的不断发展,对机器人的运动灵活性要求越来越高,尤其是在足式机器人领域。然而目前的足式机器人各个关节的运动角度及其有限,仅能够实现小角度范围内的旋转运动,这无疑极大的限制了足式机器人的应用场景。
4.考虑到复杂环境下作业的移动机器人系统的功能需求,在越障的同时可以更加的灵活移动,因此需要一种更加灵活的腿部运动关节和腿部结构,更便于实现越障和操作控制。
5.此外,在足式机器人中,由于腿部自由度大,活动空间大,导致装在机身上的移动轮会干涉足式机器人的腿部。因此还需要设计一种适用于足式仿生机器人的可收缩的轮式结构。
技术实现要素:
6.本发明提供一种集成式多足机器人,旨在至少解决现有技术中存在的技术问题之一。
7.本发明的技术方案为一种集成式多足机器人,其包括:安装有多个动力装置的机架组件;固定在所述机架组件下方的可升降轮式机构;多个腿部结构,每个腿部结构连接至所述机架组件上的每一个动力装置的转子,每个腿部结构包括:具有第一安装部和第二安装部的髋转接件,所述第一安装部和第二安装部垂直;具有动力装置的髋组件,所述髋组件与所述髋转接件的第二安装部固定连接;具有髋连接盘和大腿连接环的腿转接件,所述髋连接盘和所述大腿连接环垂直,所述髋连接盘与所述髋组件的动力装置的转子固定连接;具有动力装置的大腿组件,所述大腿组件与所述腿转接件的大腿连接环固定连接;具有动力输入轴和动力输出轴的全角度旋转关节,所述动力输入轴和所述动力输出轴垂直,所述动力输入轴与所述大腿组件的动力装置的转子固定连接;具有一长度的小腿组件,所述小腿组件与所述全角度旋转关节的动力输出轴连接,并且所述小腿组件的长度方向与所述动力输出轴垂直;其中,髋组件转轴与大腿组件转轴在同一平面中垂直,小腿组件转轴与所述大腿组件转轴在同一平面中平行。
8.本发明的有益效果如下。
9.本发明的机器人采用的全角度旋转的关节,不仅可以解决足式机器人在腿部运动
过程的干涉问题,提高其运动灵活性,还能够使机器人完成更为复杂的任务,比如向上越障、攀爬等任务。本发明使用前后布置的可收缩的轮式结构,可以使足式机器人变成轮式机器人,同时保证多足机器人足式运动不受轮机构任何干涉。
附图说明
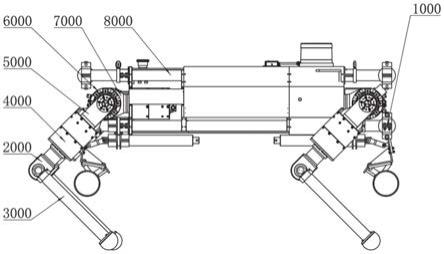
10.图1是根据本发明的多足机器人的主视图。
11.图2是根据本发明的多足机器人的前视图,其中隐藏轮式机构。
12.图3是根据本发明的多足机器人的立体图,其中隐藏轮式机构。
13.图4是根据本发明的多足机器人的轮式机构在下降位置时的立体图。
14.图5是图4的轮式机构立体图在区域a的细节放大图。
15.图6是根据本发明的多足机器人的轮式机构的局部俯视图。
16.图7是图6的轮式机构沿剖切线b
‑
b的剖视图,其中隐藏了直轴件。
17.图8是根据本发明的多足机器人的轮式机构在上升位置时的立体图。
18.图9是根据本发明的多足机器人的轮式机构的局部前视图,其中轮式机构位于下降位置。
19.图10是根据本发明多足机器人的轮式机构的局部前视图,其中轮式机构位于上升位置。
20.图11是根据本发明的多足机器人的轮式机构的轮架件的立体图。
21.图12是根据本发明的多足机器人中的机器人关节的剖视立体图。
22.图13是图12的区域b的细节放大图。
23.图14是根据本发明多足机器人实施例中的机器人关节外壳和动力输出轴的剖视图。
24.图15是根据本发明多足机器人实施例中的机器人关节在另一视角的立体图。
25.图16是根据本发明多足机器人实施例中的腿部结构的腿转接件的立体图。
26.图17是根据本发明多足机器人实施例中的通过障碍物过程中的腿部结构的动作图。
27.图18是根据本发明多足机器人实施例中的改变腿部配置的动作图。
28.图19是根据本发明多足机器人实施例中的搬运物品时的示意图。
具体实施方式
29.参照图1至图3,在一些实施例中,根据本发明的集成式多足机器人包括:安装有多个动力装置的机架组件、多个(优选为四个)腿部结构和可升降轮式机构,其中每个腿部结构的髋转接件7000的安装部固定连接至机架组件8000上的每一个动力装置的转子,而且所有腿部结构的髋组件6000转轴互相平行或者重合。下面结合附图分别描述根据本发明的集成式多足机器人的各个部分结构的实施例及其工作方式,以帮助理解本发明的优点和特点。
30.升降机构
31.参照图4和图8,在一些实施例中,根据本发明实施例中的轮式机构包括主杆组件1100、多个轮架组件1300和分别连接至主杆组件1100两端的四连杆组件1200,其中四连杆
组件1200与轮架组件1300连接,四连杆组件1200实现对轮架组件1300 的升降。
32.参照图3至图8,在一些实施例中,主杆组件1100包括一对主杆件1140、多对第一夹件1110、多对第二夹件1120、多对第三夹件1130、一对主杆固定板1150。第一夹件1110具有第一通孔1113和延伸至第一通孔1113的第一缝隙部1111;第二夹件1120具有第二通孔1123和延伸至第二通孔1123的第二缝隙部1121;第三夹件1130 具有第三通孔1133和延伸至第三通孔1133的第三缝隙部1131。多个主杆件1140相互之间平行地布置,主杆固定板1150与主杆件1140垂直地布置。
33.第一通孔1113、第二通孔1123和第三通孔1133的直径与主杆件1140的直径匹配,以允许每个主杆件1140同时穿过第一通孔1113、第二通孔1123和第三通孔1133,并且通过第一缝隙部1111、第二缝隙部1121和第三缝隙部1131上安装的紧固件(比如螺丝),使得在紧固件装紧之后,第一夹件1110、第二夹件1120和第三夹件1130 与主杆件1140稳固地夹持。主杆组件1100在两端部分别固定夹紧一对第一夹件1110。相邻的一对第二夹件1120与主杆固定板1150固定连接。第三夹件1130设有安装孔,以用于与机器人本体连接。
34.优选地,主杆件1140可以是碳纤维杆,以提供沿轴向(纤维轴方向)的高强度和模量,并且使主体结构轻便。第一夹件1110、第二夹件1120和第三夹件1130采用夹持的方式也能适应与碳纤维的主杆件1140固定而不损坏碳纤维。
35.进一步,参照图5至图7,在一些实施例中,每个第一夹件1110包括第一平面部1112,并且每对第一夹件1110的两个第一平面部1112相互面向地平行设置。主杆组件1100在两端部还分别设有一对卧式轴承件1160,每对第一夹件1110与每对卧式轴承件1160固定连接,使得轴承座底面1162由第一夹件1110的第一平面部1112 定位,并且每对卧式轴承件1160的轴承孔1161同轴。在每对第一夹件1110之间设有直轴件1170,直轴件1170与同一对的卧式轴承件1160的轴承孔1161配合(比如是机械孔轴过渡配合)。因此,通过轴承,使直轴件1170以相对于第一夹件1110而顺畅地转动,而且结构紧凑可靠。
36.参照图5至图10,在一些实施例中,其中四连杆组件1200包括第一连杆1210、第二连杆1220、第三连杆1230、第四连杆1240和线性致动器1250。
37.第一连杆1210包括第一杆部1211和第一套部1212,第一连杆1210的第一套部 1212的孔与直轴件1170的轴配合(比如是紧配合),也可以通过紧固件进行固紧,使第一套部1212与直轴件1170固定连接。因此,第一连杆1210可以通过直轴件1170 相对于主杆组件1100的端部转动。
38.此外,参照图9和图10,第一连杆1210包括设置在第一杆部1211的第一上安装孔1213和第一下安装孔1214。轮架组件1300通过紧固件和第一下安装孔1214与第一杆部1211固定连接。第二连杆1220的第一端(图9所示的左端)与第一连杆 1210的第一杆部1211的第一上安装孔1213固定连接(比如通过螺丝紧固)。第三连杆1230的第一端(图9所示的左端)与第二连杆1220的第二端(图9所示的右端) 枢转地连接。第四连杆1240的端部与第三连杆1230的第二端(图9所示的右端)枢转地连接。线性致动器1250与主杆固定板1150固定连接,线性致动器1250布置为与主杆件1140平行,并且线性致动器1250带动第四连杆1240进行线性移动,使得第四连杆1240的运动方向与主杆件1140平行。线性致动器1250比如是电动推杆、气缸执行器等。
39.因此,参照图9中的箭头,在线性致动器1250拉回第四连杆1240时,四连杆组件
1200带动轮架组件1300下降。参照图10中的箭头,在线性致动器1250推董第四连杆1240时,四连杆组件1200带动轮架组件1300上升。优选地,为了实现四连杆组件1200对轮架组件1300的较优传动效果,让轮架组件1300的设计行程能完全覆盖最低的垂直下降位置和水平的上升位置,第二连杆1220的第一端和第二端之间的距离要小于第三连杆1230的第一端和第二端之间的距离,并且小于第一连杆1210的第一上安装孔1213与直轴件1170之间的距离。
40.参照图6,在优选的实施例中,第三连杆1230的第二端设有叉部1231。第四连杆1240的端部设有杆端块1241,其中杆端块1241与叉部1231枢转地连接,并且叉部1231与杆端块1241之间设有推力球轴承1260。因此,可以降低第三连杆1230和第四连杆1240之间的机械磨损,且能适应致动器所产生的大推拉力的冲击,从而提高零件寿命。
41.参照图7和图11,在一些实施例中,轮架组件1300可以包括:l型的架接件1310,架接件1310与第一连杆1210固定连接;与架接件1310固定连接的轮架件1320。轮架件1320具有轮架部1324,可以在轮架部1324安装多个滚轮1330。优选地,滚轮 1330中可以设有轮毂电机。
42.参照图11,轮架件1320可以包括:与轮架部1324呈夹角设置的平面连接部1323,平面连接部1323的上侧与架接件1310固定连接;从平面连接部1323的底侧向下延伸的第一凸部1321;从轮架部1324向上延伸的第二凸部1322,第二凸部1322与第一凸部1321保持靠近或者接触。轮架部1324、第一凸部1321和第二凸部1322中的至少一者,或者整个轮架件1320都包含弹性材料(比如是橡胶),以对滚轮1330在地面滚动受到的冲击进行缓震。
43.因此,对安装可升降轮式机构1000的足式仿生机器人,可以实现双轮前后布置,如图1所示。四个轮子还可以由轮毂电机驱动,结构紧凑。收缩四杆机构由电动推杆驱动,在电动推杆伸出时,轮子处于机器人的前后方,不会干涉腿部的运动。在电动推杆收缩时,轮子下降,然后允许转动。
44.机器人关节
45.参照图12至图15,在一些实施例中,根据本发明实施例中的全角度旋转的机器人关节包括关节外壳2300、动力输入部分2100和动力输出部分2200。动力输入部分 2100包括与动力装置连接的动力输入轴2110和与动力输入轴2110的端部配合的动力输入锥齿轮2130。动力输出部分2200包括动力输出轴2210和与动力输出轴2210 配合的动力输出锥齿轮2220。动力输入轴2110的轴线与动力输出轴2210的轴线垂直,动力输入锥齿轮2130与动力输出锥齿轮2220啮合。在这些实施例中,动力装置一般为机器人关节电机(有框或者无框的关节电机)、舵机、液压装置等,可以配合减速器能够进行动力力矩的输出,也可以是直驱电机直接输出力矩。该输出的力矩通过动力输入轴2110传递至动力输入锥齿轮2130,动力输入锥齿轮2130和动力输出锥齿轮2220相啮合将动力力矩传递至动力输出锥齿轮2220。动力输出锥齿轮2220 与动力输出轴2210相固连,完成该关节的动力输出。动力输入锥齿轮2130和动力输出锥齿轮2220之间可以具有齿比(比如,1:2至1:1之间),进一步进行力矩放大。
46.参照图12和图14,关节外壳2300包括圆盘部2310、从圆盘部2310延伸的圆筒部2320以及平行布置的第一分叉部2330和第二分叉部2340,其中,第一分叉部2330 和第二分叉部2340通过平板部2350与圆筒部2320连接。
47.圆盘部2310具有多个安装孔的,用于与机器人的构件(比如大腿组件4000的壳体)固定连接。
48.圆筒部2320内容纳动力输入轴2110,其中动力输入轴2110的端部可以通过键与动力输入锥齿轮2130配合。进一步,圆筒部2320还包括环形的内凸起2321、沟槽2323和设在内凸起2321和沟槽2323之间的内轴承孔2322。动力输入部分2100 的动力输入端轴承2120的外圈与内轴承孔2322配合,而内圈与动力输入轴2110进行配合。设置在沟槽2323的挡圈2150以限定动力输入端轴承2120的外圈在内轴承孔2322中配合。
49.参照图13,优选地,动力输入端轴套2160设置在动力输入轴2110的端部与动力输入端轴承2120之间。动力输入端盖2140与动力输入轴2110的端部通过螺丝固定连接,以限定动力输入锥齿轮2130和动力输入端轴套2160一起抵靠动力输入端轴承2120的内圈。在实际机械装配时,可以调整动力输入端轴套2160的厚度,进而实现动力输入锥齿轮2130的安装位置精度。
50.参照图12和图14,关节外壳2300第一分叉部2330和第二分叉部2340用于支撑动力输出轴2210,其中动力输出轴2210的输出端伸出第一分叉部2330的部分用于连接机器人的运动部件(比如小腿组件3000)。第一分叉部2330和第二分叉部2340 的中间线与圆筒部2320的中轴线平行且具有距离,使得第一分叉部2330比第二分叉部2340更远离圆筒部2320的中轴线,从而更能避免连接动力输出轴2210的输出端的机器人运动部件出现干涉,并且实现全角度旋转。
51.第一分叉部2330包括第一分叉部内缘2332和开口向外的第一分叉部轴承孔 2331,第二分叉部2340包括第二分叉部内缘2342和开口向外的第二分叉部轴承孔 2341。作为优选的实施方式,关节外壳2300一体成型加工,能够保证第一分叉部2330 和第二分叉部2340的轴承孔的同轴度,减少轴承不同轴所带来的摩擦影响。
52.参照图12和图14,动力输出端第一轴承2230配合在第一分叉部轴承孔2331中并由第一分叉部内缘2332定位;动力输出端第二轴承2240配合在第二分叉部轴承孔 2341中并由第二分叉部内缘2342定位。动力输出锥齿轮2220具有与动力输出轴2210 配合的通孔,并且可以通过键连接。动力输出轴2210具有轴肩,使动力输出锥齿轮 2220通过轴肩定位在动力输出端第一轴承2230和动力输入轴2110的轴线之间,使得动力输出锥齿轮2220与动力输入锥齿轮2130进行啮合,完成90度转向的动力传递。由于动力输出轴2210由双轴承支撑,使得动力输出锥齿轮2220的动力传递刚性较强。动力输出轴2210可以具有径向的销孔,其与动力输出锥齿轮2220径向的销孔配对,用于通过销将动力输出锥齿轮2220定位和固定至动力输出轴2210。
53.动力输出部分2200还包括:输出端接驳件2250,输出端接驳件2250的内孔与动力输出轴2210伸出第一分叉部2330的轴端部配合连接;动力输出端第一盖2260,动力输出端第一盖2260与动力输出轴2210伸出第一分叉部2330的轴端部固定连接,并且压迫输出端接驳件2250;动力输出端第二盖2270和动力输出端第三盖2290,动力输出端第二盖2270和动力输出端第三盖2290分别连接至第一分叉部2330和第二分叉部2340的外侧,以使动力输出端第一轴承2230和动力输出端第二轴承2240分别限制在第一分叉部轴承孔2331和第二分叉部轴承孔2341中;设置在输出端接驳件 2250和动力输出端第一轴承2230之间的动力输出端轴套2280,动力输出端轴套2280 穿过动力输出端第二盖2270。其中,在动力输出端第
一盖2260与动力输出轴2210 固定连接时,输出端接驳件2250、动力输出端轴套2280和动力输出端第一轴承2230 的内圈一起抵靠。因此,动力输入锥齿轮2130和动力输出锥齿轮2220的啮合程度,可以通过动力输入外壳定位及输入端轴套和输出端轴套进行调整,以满足不同摩擦力要求。
54.参照图15,输出端接驳件2250包括:具有螺纹孔的接驳件根部2251;具有螺丝孔的接驳件端部2252,螺丝孔与螺纹孔同轴配对,接驳件端部2252和接驳件根部2251 之间设有柱杆安装孔2254和从柱杆安装孔2254延伸的缝隙;具有通孔的接驳件套部 2253,其中接驳件套部2253的通孔的轴线与柱杆安装孔2254的轴线垂直。输出端接驳件2250的柱杆安装孔2254连接至足式移动机器人的小腿组件3000,以允许接驳件端部2252与接驳件根部2251被螺丝拉紧时,接驳件端部2252和接驳件根部2251 将小腿组件3000夹紧。
55.参照图14和图15,在进一步的实施例中,动力输入轴2110、动力输入轴2110 内部镂空设计,可以减少该腿部关节的质量,提高运动的灵活性。并且可以根据技术要求,灵活的调整动力输入轴2110的长度,以满足不同功能需求。可以在关节外壳 2300的第一分叉部2330和第二分叉部2340上安装齿轮外挡板,以避免灰尘等进入传动关节内部,影响运动的摩擦力。
56.腿部结构
57.参照图2和图3,在一些实施例中,根据本发明实施例中的腿部结构包括:具有动力装置的髋组件6000;具有动力装置的大腿组件4000;具有动力输入轴2110和动力输出轴2210的全角度旋转关节2000;具有一长度的小腿组件3000;其中,髋组件 6000通过髋转接件7000与机器人连接,大腿组件4000通过腿转接件5000与髋组件6000连接,小腿组件3000和大腿组件4000之间连接全角度旋转关节2000。在这些实施例中,动力装置一般为机器人关节电机(有框或者无框的关节电机)、舵机、液压装置等,可以配合减速器能够进行动力力矩的输出,也可以是直驱电机直接输出力矩。动力装置具有相对的互相切换的定子和转子,即是定子一般为相对固定的零件时,转子相对于定子转动,可以理解如果转子固定,则定子也可以相对于转子转动。全角度旋转关节2000为上述实施例中描述的全角度旋转的机器人关节。
58.在进一步的实施例中,髋转接件7000具有第一安装部和第二安装部,第一安装部和第二安装部垂直。髋组件6000与髋转接件7000的第二安装部固定连接。腿转接件5000具有髋连接盘5010和大腿连接环,髋连接盘5010和大腿连接环垂直,髋连接盘5010与髋组件6000的动力装置的转子固定连接。大腿组件4000与腿转接件5000 的大腿连接环固定连接。全角度旋转关节2000的动力输入轴2110和动力输出轴2210 垂直,动力输入轴2110与大腿组件4000的动力装置的转子固定连接。
59.小腿组件3000与全角度旋转关节2000的动力输出轴2210连接,并且小腿组件 3000的长度方向与动力输出轴2210垂直。因此,参照图2和图3,髋组件6000转轴 (r1)与大腿组件4000转轴(r2)在同一平面中垂直,小腿组件3000转轴(r3)与大腿组件4000转轴(r2)在同一平面中平行。由此,腿部结构中的小腿组件3000和大腿组件4000可以实现任意关节角度的旋转。而髋组件6000也可以相对于机器人的机架组件8000进行一定范围内的角度的转动,如图19所示。
60.在一些实施例中,考虑到加工和设计方便,髋转接件7000和腿转接件5000的结构
和配置方式大致相同。下面以腿转接件5000为例进行细节结构描述。
61.参照图16,腿转接件5000还可以包括:连接在髋连接盘5010和大腿连接环之间的加强筋5030;设置在大腿连接环中的线缆盒5050,用于保护大腿组件4000中的动力装置的电气接口。设置在大腿连接环边缘的扇形缺口5040,以允许电气接口和电缆经过。优选地,动力装置的控制电路和能源电路的线缆,均位于动力装置末端(如图15),以减少控制线材对关节运动带来的影响。结合腿转接件5000的扇形缺口5040,可以让大腿组件4000的动力装置的线缆方便收纳且尽量减少对大腿组件4000转动时的干涉和缠绕阻碍。
62.多足机器人的工作方式
63.基于腿部结构的特点,根据本发明的多足机器人可以实现跨越障碍物(如图17)、多足配置切换(如图18)和抬举物体等操作(如图19)。
64.参照图17,由于障碍物的高度过高,传统的机器人关节由于受到运动角度的限制,难以完成翻越等操作。而根据本发明的多足机器人可以通过抬高大腿组件4000 的运动角度,将小腿组件3000的末端放置于障碍物上方,完成越障操作,具体的机器人运动控制方法如下步骤:在多足机器人靠近障碍物之前,触发靠近障碍物的腿部结构的髋组件6000中的动力装置,使靠近障碍物的腿部结构的大腿组件4000向后转动以抬起小腿组件3000;触发靠近障碍物的腿部结构的大腿组件4000中的动力装置,使靠近障碍物的腿部结构的小腿组件3000沿相反于大腿组件4000的转动方向的方向转动,并保持小腿组件3000位于障碍物上方或压在障碍物上;控制多足机器人的其余腿部结构的运动,使多足机器人前进。
65.图18为根据本发明的多足机器人的改变单腿部配置的方法,包括以下步骤:触发腿部结构的大腿组件4000中的动力装置,带动小腿组件3000向上转动到小腿组件 3000的竖直位置;同时触发腿部结构的髋组件6000中的动力装置,带动大腿组件4000 向下转动到大腿组件4000的竖直位置;触发腿部结构的大腿组件4000中的动力装置和/或髋组件6000中的动力装置,使大腿组件4000和小腿组件3000转动到目标位置。
66.图19为根据本发明的多足机器人的双前腿夹持物体的示意图。双前大腿组件 4000转动到机器人的机架组件8000上方后,其髋组件6000相对于机器人的机架组件8000相向摆转,从而可以利用两小腿组件3000将物品夹持并递高。
67.以上所述,只是本发明的较佳实施例而已,本发明并不局限于上述实施方式,只要其以相同的手段达到本发明的技术效果,凡在本公开的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本公开保护的范围之内。都应属于本发明的保护范围。在本发明的保护范围内其技术方案和/或实施方式可以有各种不同的修改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1