一种冗余控制架构及冗余控制方法与流程
本发明涉及车辆的电子助力转向系统,尤其涉及一种冗余控制架构及冗余控制方法。
背景技术:
1、现有技术中,eps(electric power steering,电子助力转向)控制器的ecu(electronic control unit,电子控制单元)内通常采用冗余设计,其内部有两个控制模块,每个控制模块都包括mcu(microcontroller unit,微控制单元)和电机控制单元。现有技术中的ecu通常采用一路外部通信与其他车载控制器交互,ecu内部的两个控制模块之间通过内部通信进行交互。其工作时,kl15点火信号唤醒第一控制模块,然后第一控制模块通过内部通信唤醒第二控制模块;第一控制模块接受/发送整车报文,并通过内部通信把报文发送给第二控制模块,第一控制模块进入应用程序1,第二控制模块进入应用程序2,ecu正常运行。
2、现有技术存在的缺点在于:1)如果kl15点火信号失效,则第一控制模块不能唤醒,于此同时第二控制模块也不会唤醒,影响eps系统正常运行,存在安全隐患;2)第一控制模块需要将接收的报文通过内部通信发送给第二控制模块,效率低且有延迟;3)第二控制模块正常工作与否,需要建立在第一控制模块正常通信的基础上,冗余度低。
技术实现思路
1、为了克服上述技术缺陷,本发明的目的在于提供一种冗余度高、效率高、安全性好的冗余控制架构及冗余控制方法。
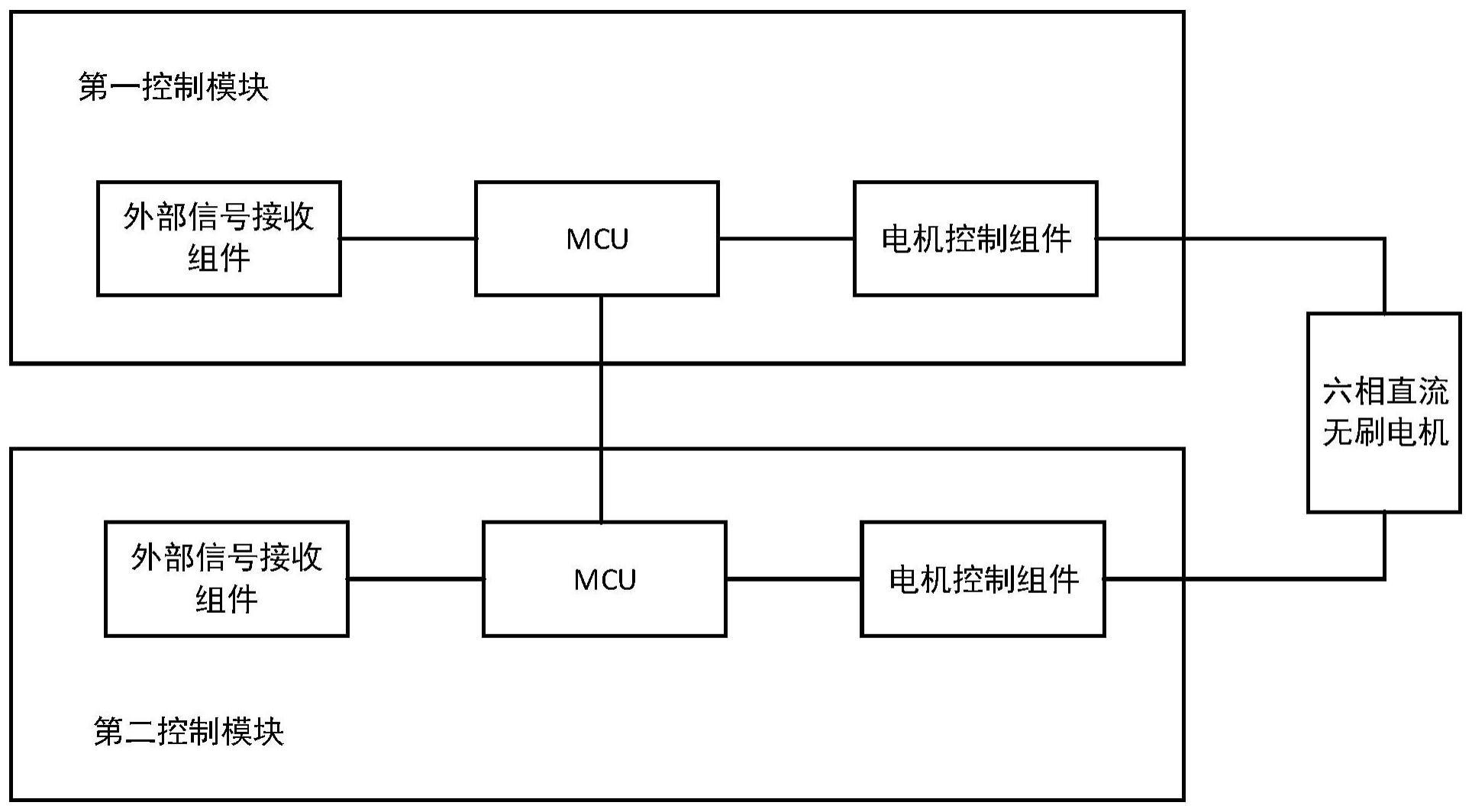
2、本发明公开了一种冗余控制架构,所述冗余控制架构包括完全相同的第一控制模块和第二控制模块;
3、所述第一控制模块和第二控制模块均包括外部信号接收组件、mcu和电机控制组件;
4、所述第一控制模块的mcu和第二控制模块的mcu分别通过外部信号接收组件接收相同的外部信号,并通过电机控制组件共同控制六相直流无刷电机;
5、所述第一控制模块的mcu和第二控制模块的mcu通过内部通信连接。
6、优选地,所述外部信号接收组件包括分别与mcu连接的供电单元、扭矩角度传感器接口、canfd接口。
7、优选地,所述电机控制组件包括门驱动单元、控制单元、开关单元、相电压反馈单元和转子位置反馈单元。
8、优选地,所述第一控制模块的mcu和第二控制模块的mcu通过can总线、canfd总线或spi总线通信连接。
9、本发明还公开了一种冗余控制方法,所述方法基于如上所述的冗余控制架构,
10、所述第一控制模块和第二控制模块独立接收外部信号,同步进行唤醒和/或根据外部信号对电机进行控制,
11、所述冗余控制方法包括:
12、当第一控制模块或第二控制模块中的任一控制模块接收外部信号发生异常时,发生异常的控制模块的mcu通过内部通信获取另一控制模块接收到的外部信号,并根据另一控制模块接收到的外部信号进行唤醒和/或对电机进行控制。
13、所述外部信号为外部唤醒信号,所述外部唤醒信号包括点火信号和网络唤醒报文,
14、所述冗余控制方法包括:
15、当第一控制模块和第二控制模块中的任一控制模块接收到外部唤醒信号后,接收到外部唤醒信号的控制模块唤醒,并通过内部通信发送一内部唤醒信号至另一控制模块的mcu;
16、若另一控制模块收到所述内部唤醒信号时处于未唤醒状态,则根据所述内部唤醒信号唤醒。
17、所述外部信号非外部唤醒信号,所述外部唤醒信号包括点火信号和网络唤醒报文;
18、所述冗余控制方法包括:
19、当第一控制模块和第二控制模块中的任一控制模块接收到外部信号后,接收到外部信号的控制模块发送一包含所述外部信号的当前状态信息至另一控制模块;
20、另一控制模块根据接收到的当前状态信息中的外部信号判断自身通过外部信号接收组件接收的外部信号是否出现异常;
21、当判定出现异常时,另一控制模块使用当前状态信息中包含的外部信号对电机进行控制。
22、所述外部信号非外部唤醒信号,所述外部唤醒信号包括点火信号和网络唤醒报文;
23、所述冗余控制方法包括:
24、第一控制模块和第二控制模块每隔一预设时间向另一模块发送一包含其接收外部信号的当前状态信息;
25、收到当前状态信息的模块根据收到的当前状态信息中的外部信号判断自身通过外部信号接收组件接收的外部信号是否出现异常;
26、当判定出现异常时,收到当前状态信息的模块使用当前状态信息中包含的外部信号对电机进行控制。
27、采用了上述技术方案后,与现有技术相比,具有以下有益效果:
28、1.第一控制模块和第二控制模块可以独立接收外部信号,独立运行,冗余度高、安全性好;
29、2、第一控制模块和第二控制模块同时接收外部信号,可以对重要信号,例如车速,转速等通过内部通信进行对比,效率和可靠性大大提升;
30、3、即使第一控制模块失效,第二控制模块依然可以正常工作,ecu功能不受影响,提高了ecu工作效率;
31、4、第一控制模块不需要通过内部通信把全部整车信号传递给第二控制模块,减少了内部通信的负载量。
技术特征:
1.一种冗余控制架构,其特征在于,
2.如权利要求1所述的冗余控制架构,其特征在于,
3.如权利要求1所述的冗余控制架构,其特征在于,
4.如权利要求1所述的冗余控制架构,其特征在于,
5.一种冗余控制方法,所述方法基于如权利要求1-4中任一项所述的冗余控制架构,其特征在于,
6.如权利要求5所述的冗余控制方法,其特征在于,
7.如权利5要求所述的冗余控制方法,其特征在于,
8.如权利要求5所述的冗余控制方法,其特征在于,
技术总结
本发明提供了一种冗余控制架构及冗余控制方法,所述冗余控制架构包括完全相同的第一控制模块和第二控制模块;所述第一控制模块和第二控制模块均包括外部信号接收组件、MCU和电机控制组件;所述第一控制模块的MCU和第二控制模块的MCU分别通过外部信号接收组件接收相同的外部信号,并通过电机控制组件共同控制六相直流无刷电机;所述第一控制模块的MCU和第二控制模块的MCU通信连接。采用上述技术方案后,第一控制模块和第二控制模块可以同步唤醒,独立工作,提升了系统的安全性和可靠性。
技术研发人员:程方圆
受保护的技术使用者:上海海拉电子有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!