一种主动回正电动助力转向系统的控制方法和装置与流程
本发明涉及电动助力,特别是涉及一种主动回正电动助力转向系统的控制方法和一种主动回正电动助力转向系统的控制装置。
背景技术:
1、近些年来,汽车行业迅速发展,汽车转向系统技术也迎来了一种新的、集成性更强的、更加有效的方式——电动助力转向系统(eps)。该技术被越来越多的运用于各类车型,因为他拥有比机械转向系统和液压转向系统更加优秀的表现,转向跟随性好、操纵方便、灵活、回正性能好、结构紧凑,便于安装和模式化、低温性能好、节能环保等一系列优点,影响eps性能的关键因素是控制策略,而回正策略又是控制策略的重中之重。良好的回正性能,可以增加车辆的操纵性和稳定性。
2、目前市面上的主流回正控制策略基本上有两种,一种直接方向盘位置对应回正力矩进行回正;还有一种是方向盘位置对应目标回正速度,通过控制目标回正速度的大小使车辆达到理想的主动回正状态。现阶段的主动回正策略侧重回正的平顺性和回正的残余角,对于转向手感并没有在主动回正模块有妥当的考虑。并且,主动回正模块也会对于转向手感有很大的影响。
技术实现思路
1、鉴于上述问题,提出了本发明实施例以便提供一种克服上述问题或者至少部分地解决上述问题的一种主动回正电动助力转向系统的控制方法和相应的一种主动回正电动助力转向系统的控制装置。
2、为了解决上述问题,本发明实施例公开了一种主动回正电动助力转向系统的控制方法,所述方法包括:
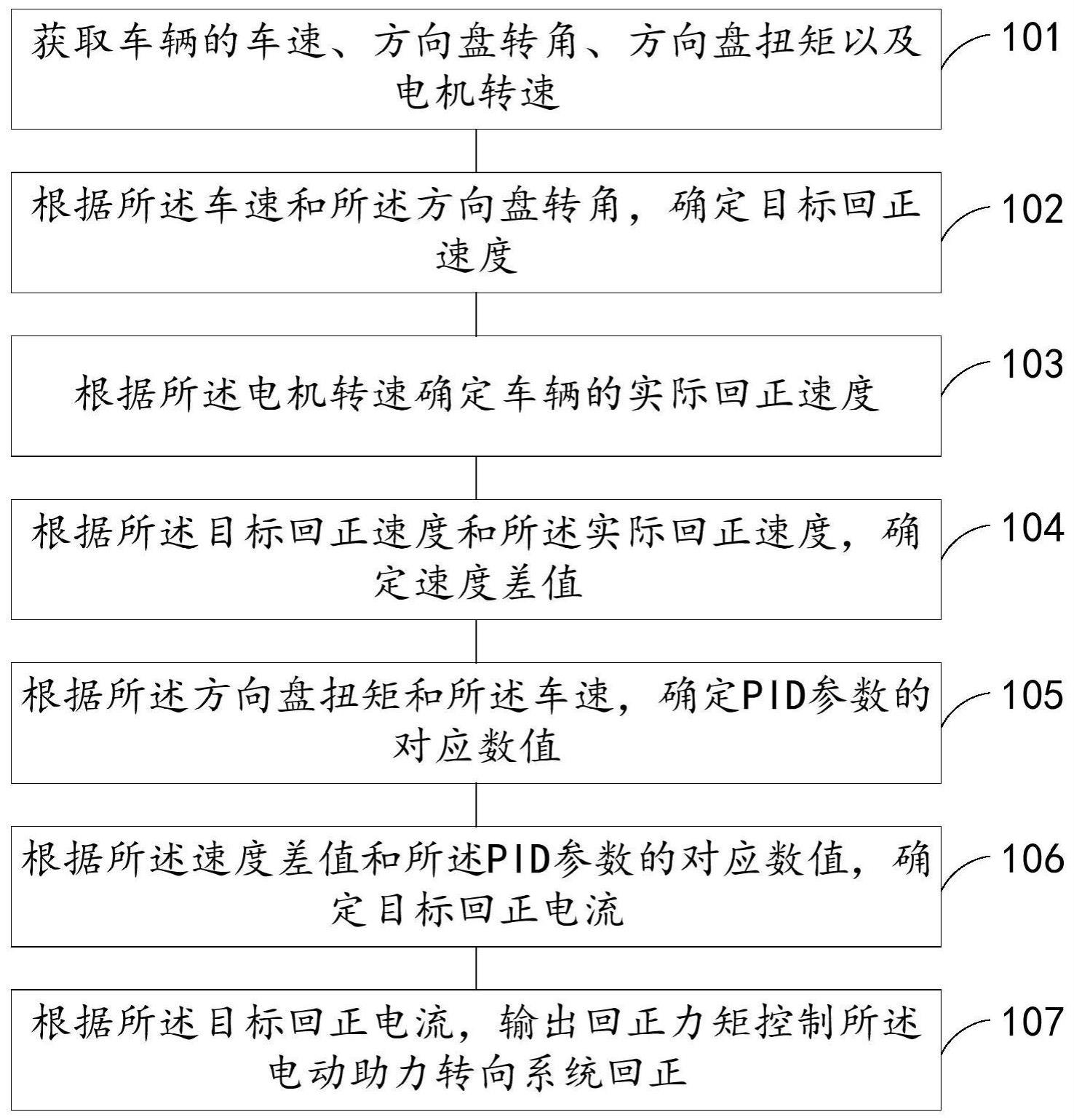
3、获取车辆的车速、方向盘转角、方向盘扭矩以及电机转速;
4、根据所述车速和所述方向盘转角,确定目标回正速度;
5、根据所述电机转速确定车辆的实际回正速度;
6、根据所述目标回正速度和所述实际回正速度,确定速度差值;
7、根据所述方向盘扭矩和所述车速,确定pid参数的对应参数;
8、根据所述速度差值和所述pid参数的对应参数,确定目标回正电流;
9、根据所述目标回正电流,输出回正力矩控制所述电动助力转向系统回正。
10、可选地,所述根据所述车速和所述方向盘转角,确定目标回正速度,包括:
11、获取车速、方向盘转角与回正角速度的第一映射关系;
12、根据所述车速、所述方向盘转角,从所述第一映射关系中,确定对应的目标回正速度。
13、可选地,所述根据所述电机转速确定车辆的实际回正速度,包括:
14、获取所述电机的转向电机减速比和转向器线角传动比;
15、根据所述转向电机减速比和所述转向器线角传动比确定实际回正速度。
16、可选地,所述pid参数包括比例参数kpgain、积分参数kigain和微分参数kdgain,所述根据所述方向盘扭矩和所述车速,确定pid参数的对应参数,包括:
17、获取方向盘扭矩、车速与比例参数的第二映射关系,方向盘扭矩、车速与积分参数的第三映射关系,方向盘扭矩、车速以及与微分参数的第四映射关系;
18、根据所述方向盘扭矩、所述车速,从所述第二映射关系中,确定比例参数;
19、根据所述方向盘扭矩、所述车速,从所述第三映射关系中,确定积分参数;
20、根据所述方向盘扭矩、所述车速,从所述第四映射关系中,确定微分参数。
21、可选地,所述根据所述速度差值和所述pid参数的对应参数,确定目标回正电流,包括:
22、将所述速度差值与所述比例参数的数字相乘,得到第一乘积;
23、将所述速度差值和所述积分参数的数字相乘,得到第二乘积;
24、将所述速度差值和所述微分参数的数字相乘,得到第三乘积;
25、将所述第一乘积、所述第二乘积以及所述第三乘积进行相加,得到所述目标回正电流。
26、可选地,当所述速度差值为正值时,所述目标回正电流为正向电流;当所述速度差值为负值时,所述目标回正电流为反向电流;
27、所述根据所述目标回正电流,输出回正力矩控制所述电动助力转向系统回正,包括:
28、当所述目标回正电流为正向电流时,根据所述目标回正电流,输出回正力矩辅助所述电动助力转向系统回正;
29、当所述目标回正电流为反向电流时,根据所述目标回正电流,输出回正力矩抑制所述电动助力转向系统回正。
30、相应的,本发明实施例公开了一种
31、速度差值和所述pid参数的对应参数,确定目标回正电流;
32、回正模块,用于根据所述目标回正电流,输出回正力矩控制所述电动助力转向系统回正。
33、可选地,所述目标回正速度模块包括:
34、第一映射关系子模块,用于获取车速、方向盘转角与回正角速度的第一映射关系;
35、目标回正速度子模块,用于根据所述车速、所述方向盘转角,从所述第一映射关系中,确定对应的目标回正速度。
36、可选地,所述实际回正速度模块包括:
37、获取电机数据子模块,用于获取所述电机的转向电机减速比和转向器线角传动比;
38、实际回正速度子模块,用于根据所述转向电机减速比和所述转向器线角传动比确定实际回正速度。
39、可选地,所述pid参数包括比例参数kpgain、积分参数kigain和微分参数kdgain,所述确定pid参数模块包括:
40、获取映射关系子模块,用于获取方向盘扭矩、车速与比例参数的第二映射关系,方向盘扭矩、车速与积分参数的第三映射关系,方向盘扭矩、车速以及与微分参数的第四映射关系;
41、第二映射关系子模块,用于根据所述方向盘扭矩、所述车速,从所述第二映射关系中,确定比例参数;
42、第三映射关系子模块,用于根据所述方向盘扭矩、所述车速,从所述第三映射关系中,确定积分参数;
43、第四映射关系子模块,用于根据所述方向盘扭矩、所述车速,从所述第四映射关系中,确定微分参数。
44、可选地,所述目标回正电流模块包括:
45、比例参数乘积子模块,用于将所述速度差值与所述比例参数的数字相乘,得到第一乘积;
46、积分参数乘积子模块,用于将所述速度差值和所述积分参数的数字相乘,得到第二乘积;
47、微分参数乘积子模块,用于将所述速度差值和所述微分参数的数字相乘,得到第三乘积;
48、目标回正电流子模块,用于将所述第一乘积、所述第二乘积以及所述第三乘积进行相加,得到所述目标回正电流。
49、可选地,当所述速度差值为正值时,所述目标回正电流为正向电流;当所述速度差值为负值时,所述目标回正电流为反向电流;所述回正模块包括:
50、辅助子模块,用于当所述目标回正电流为正向电流时,根据所述目标回正电流,输出回正力矩辅助所述电动助力转向系统回正;
51、抑制子模块,用于当所述目标回正电流为反向电流时,根据所述目标回正电流,输出回正力矩抑制所述电动助力转向系统回正。
52、相应的,本发明实施例公开了一种电子设备,包括:处理器、存储器及存储在所述存储器上并能够在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述主动回正电动助力转向系统的控制方法实施例的各个步骤。
53、相应的,本发明实施例公开了一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现上述主动回正电动助力转向系统的控制方法实施例的各个步骤。
54、本发明实施例包括以下优点:通过传感器获取车辆的车速、方向盘转角、方向盘扭矩以及电机转速,根据车速和方向盘转角,确定目标回正速度,再根据电机转速确定车辆的实际回正速度,然后根据目标回正速度和实际回正速度,确定速度差值,再根据方向盘扭矩和车速,确定pid参数的对应参数,然后根据速度差值和pid参数的对应参数,确定目标回正电流,最后根据目标回正电流,输出回正力矩控制电动助力转向系统回正。本发明实施例通过方向盘扭矩和车速确定pid参数的对应参数,设计回正电流衰减模块,以减少拽手感,可以对电动助力转向系统进行控制,避免回正状态的误识别,提高整个电动助力转向系统的稳定性,是一种更优的自适应的处理方法。
- 还没有人留言评论。精彩留言会获得点赞!