一种无人驾驶移动充电机器人的制作方法
1.本实用新型涉及新能源技术领域,尤其是指一种无人驾驶移动充电机器人。
背景技术:
2.随着科学技术的发展,以及人类对节能减排的要求,新能源汽车变得日益普遍,而电动汽车是常见的一种新能源汽车。现有的电动汽车在充电时,必须要停靠在固定充电桩旁进行充电,充电方式十分不灵活,因此有必要研究一种解决方案。
技术实现要素:
3.本实用新型针对现有技术的问题提供一种无人驾驶移动充电机器人,以解决背景技术中提出的问题。
4.为了解决上述技术问题,本实用新型采用如下技术方案:一种无人驾驶移动充电机器人,包括充电车以及与充电车连接的自动驾驶机器人,所述充电车包括第一电动底盘、设于第一电动底盘上的电池包、设于电池包上的充电模块、设于充电模块上的充电枪以及若干个设于第一电动底盘的第一车轮,所述电池包用于为充电模块提供电能,所述充电模块用于通过充电枪输出电能,所述自动驾驶机器人用于拉动或推动充电车。
5.优选地,所述充电模块上设有放置盒,所述放置盒用于放置充电枪。
6.优选地,所述自动驾驶机器人包括第二电动底盘、设于第二电动底盘上的机器人主体、设于第二电动底盘上的电池、以及若干个设于底盘的第二车轮,所述电池为自动驾驶机器人提供电能。
7.优选地,所述自动驾驶机器人与第一电动底盘可拆卸地连接。
8.本实用新型的有益效果:当电动汽车需要充电且不便移动时,本实用新型的自动驾驶机器人便会带动充电车行驶到电动汽车旁,然后司机便可以将充电枪与汽车的充电接口对接,而因为电池包为充电模块提供电能,充电模块便可以通过充电枪向电动汽车输出电能,从而进行充电。本实用新型具有移动灵活的优点,而且可以实现无人驾驶,从而灵活地行驶到电动汽车旁边,然后为电动车充电,解决了电动汽车只能停靠在固定充电桩旁进行充电的问题,因而具有宽广的推广应用场景。
附图说明
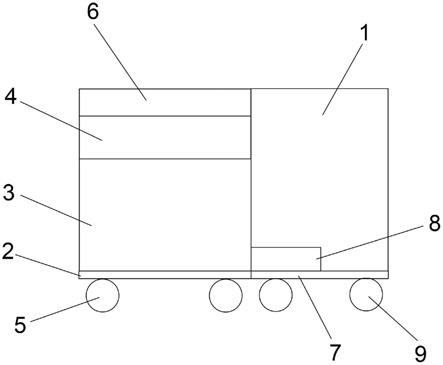
9.图1为本实用新型的整体结构示意图。
10.附图标记:1、自动驾驶机器人;2、第一电动底盘;3、电池包;4、充电模块;5、第一车轮;6、放置盒;7、第二电动底盘;8、电池;9、第二车轮。
具体实施方式
11.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。以下结合附图对本实用新型进行
详细的描述。
12.如图1所示,本实用新型提供的一种无人驾驶移动充电机器人,包括充电车以及与充电车连接的自动驾驶机器人1,所述充电车包括第一电动底盘2、设于第一电动底盘2上的电池包3、设于电池包3上的充电模块4、设于充电模块4上的充电枪以及若干个设于第一电动底盘2的第一车轮5,所述电池包3用于为充电模块4提供电能,所述充电模块4用于通过充电枪输出电能,所述自动驾驶机器人1用于拉动或推动充电车。本实用新型的自动驾驶机器人1的原理、技术方案等为常规技术手段,在此不作赘述。
13.当电动汽车需要充电且不便移动时,本实用新型的自动驾驶机器人1便会带动充电车行驶到电动汽车旁,然后司机便可以将充电枪与汽车的充电接口对接,而因为电池包3为充电模块4提供电能,充电模块4便可以通过充电枪向电动汽车输出电能,从而进行充电。本实用新型具有移动灵活的优点,而且可以实现无人驾驶,从而灵活地行驶到电动汽车旁边,然后为电动车充电,解决了电动汽车只能停靠在固定充电桩旁进行充电的问题,因而具有宽广的推广应用场景。
14.所述充电模块4上设有放置盒6,所述放置盒6用于放置充电枪。如此设置,使得充电枪在不使用时,可以放置在放置盒6中,从而对充电枪进行保护,放置充电枪被外界破坏。
15.所述自动驾驶机器人1包括第二电动底盘7、设于第二电动底盘7上的机器人主体、设于第二电动底盘7上的电池8、以及若干个设于底盘的第二车轮9,所述电池8为自动驾驶机器人1提供电能,如此设置,自动驾驶机器人1便可以获得行驶所需的电能。
16.所述自动驾驶机器人1与第一电动底盘2可拆卸地连接。自动驾驶无人与第一电动底盘2的可拆卸连接方式包括不限于卡扣、螺栓等,如此自动驾驶机器人1便可以与第一电动底盘2可拆卸地连接,从而便于将自动驾驶机器人1与第一电动底盘2进行拆卸,进而便于自动驾驶机器人1的多次来回拖不同的充电车来为不同的电动汽车充电。第一电动底盘。
17.以上所述,仅是本实用新型较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型以较佳实施例公开如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当利用上述揭示的技术内容作出些许变更或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型技术是指对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的范围内。
技术特征:
1.一种无人驾驶移动充电机器人,其特征在于:包括充电车以及与充电车连接的自动驾驶机器人(1),所述充电车包括第一电动底盘(2)、设于第一电动底盘(2)上的电池包(3)、设于电池包(3)上的充电模块(4)、设于充电模块(4)上的充电枪以及若干个设于第一电动底盘(2)的第一车轮(5),所述电池包(3)用于为充电模块(4)提供电能,所述充电模块(4)用于通过充电枪输出电能,所述自动驾驶机器人(1)用于拉动或推动充电车。2.根据权利要求1所述的一种无人驾驶移动充电机器人,其特征在于:所述充电模块(4)上设有放置盒(6),所述放置盒(6)用于放置充电枪。3.根据权利要求1所述的一种无人驾驶移动充电机器人,其特征在于:所述自动驾驶机器人(1)包括第二电动底盘(7)、设于第二电动底盘(7)上的机器人主体、设于第二电动底盘(7)上的电池(8)、以及若干个设于底盘的第二车轮(9),所述电池(8)为自动驾驶机器人(1)提供电能。4.根据权利要求1所述的一种无人驾驶移动充电机器人,其特征在于:所述自动驾驶机器人(1)与第一电动底盘(2)可拆卸地连接。
技术总结
本实用新型涉及新能源技术领域,尤其是指一种无人驾驶移动充电机器人,包括充电车以及与充电车连接的自动驾驶机器人,所述充电车包括第一电动底盘、设于第一电动底盘上的电池包、设于电池包上的充电模块、设于充电模块上的充电枪以及若干个设于第一电动底盘的第一车轮,所述电池包用于为充电模块提供电能,所述充电模块用于通过充电枪输出电能,所述自动驾驶机器人用于拉动或推动充电车。本实用新型具有移动灵活的优点,而且可以实现无人驾驶,从而灵活地行驶到电动汽车旁边,然后为电动车充电,解决了电动汽车只能停靠在固定充电桩旁进行充电的问题,因而具有宽广的推广应用场景。景。景。
技术研发人员:黄晓丽 罗豫韦华
受保护的技术使用者:托尔动力(北京)智能科技有限公司
技术研发日:2021.03.29
技术公布日:2021/11/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1