一种物流搬运机器人的制作方法
1.本实用新型涉及机器人技术领域,具体为一种物流搬运机器人。
背景技术:
2.物流是货物流通的过程,在电商贸易规模逐渐扩大的背景下,物流的配送速度以及服务质量也不断提高,这主要得益于智能化的配送系统,以及智能化的物流搬运机器人的应用;
3.经分析发现,目前专利申请号zl201821487329.5的一种物流搬运机器人,通过设置防护装置的一系列装置,能够对机体进行防护,提高了机体的防撞性能;
4.但其不足之处在于:第二固定板的长度与活动板展开后的长度无法匹配,虽能够避免机体遭受直接撞击,但活动板遭受撞击仍对机体有一定的冲击,且货物也有倾覆的危险;
5.同时,活动板的顶部缺少对于货物的限位,货物得不到稳定的固定容易从活动板的顶部滑落;
6.为此,我们提出一种新的物流搬运机器人,以解决上述防护装置防护效果不全面,以及活动板对货物的限位效果不佳的问题。
技术实现要素:
7.本实用新型的目的在于提供一种物流搬运机器人,以解决上述背景技术中提出的防护装置防护效果不全面,以及活动板对货物的限位效果不佳的问题。
8.为实现上述目的,本实用新型提供如下技术方案:一种物流搬运机器人,包括机体和滚轮,机体的底部安装有四个滚轮,机体的正面安装有便于放置货物的放置板,机体的右侧安装有用于保护机体的防护板。
9.优选的,所述放置板包括:丝杆一、限位板、橡胶垫和定位块,所述丝杆嵌入设置于放置板的正面,所述丝杆一的另一端固定有把手,所述限位板套接于丝杆的外侧,所述橡胶垫紧密贴合于放置板的外侧面,所述定位块固定于放置板的背面。
10.优选的,所述限位板的高度大于放置板的高度,所述限位板的外侧划刻有纵横交错的防滑纹理。
11.优选的,所述防护板包括:连接杆、套筒、弹簧、丝杆二和挡块,所述连接杆安装于防护板的左侧,所述套筒套接于连接杆的外侧,所述弹簧嵌入设置于套筒的内部,所述丝杆二安装于防护板的左侧边缘处,橡胶材质的所述挡块活动套接于丝杆二的外侧。
12.优选的,所述机体包括:定位杆和挡板,所述定位杆通过铰链安装于机体的正面中间位置,所述挡板安装于机体的顶部左右两侧边缘。
13.与现有技术相比,本实用新型的有益效果是:
14.1、该种物流搬运机器人,通过设置有挡块,挡块通过丝杆二连接于防护板上,通过旋转丝杆二对挡块的位置进行调节,使挡块与限位板平齐,在遇到障碍物时使挡块能够首
先与障碍物接触,并通过弹簧的收缩形变吸收冲击,进而避免货物直接遭受撞击而出现损坏的情况,同时更加全面的对机体达到防护的效果。
15.2、其次,该种物流搬运机器人,通过设置有限位板,限位板通过丝杆一安装于放置板的外侧,通过旋转丝杆一能够对限位板的位置进行灵活调节,并通过限位板对货物进行限位,有效减少货物在机体顶部出现滑动的情况,进而提高货物在运输途中的稳定性,防止货物从机体的顶部滑落。
附图说明
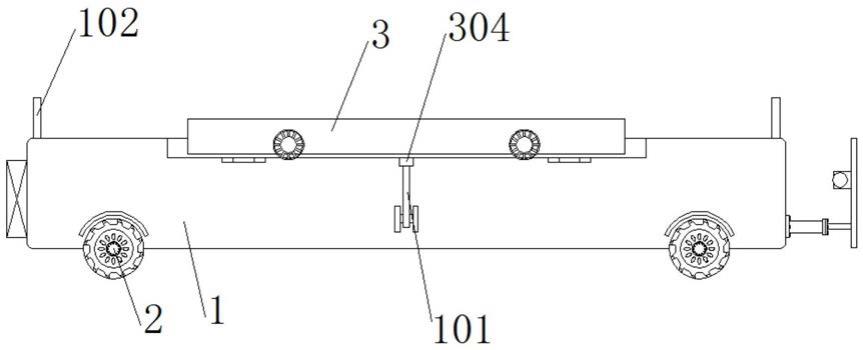
16.图1是本实用新型的整体结构示意图;
17.图2是本实用新型的整体结构俯视图;
18.图3是本实用新型的防护板局部结构爆炸图;
19.图4是本实用新型的图2中a处放大结构示意图。
20.图中:机体1、定位杆101、挡板102、滚轮2、放置板3、丝杆一301、限位板302、橡胶垫303、定位块304、防护板4、连接杆401、套筒402、弹簧403、丝杆二404、挡块405。
具体实施方式
21.请参阅图1
‑
4,本实施例提供一种技术方案:一种物流搬运机器人,包括机体1和滚轮2,机体1的底部安装有四个滚轮2,机体1的正面安装有便于放置货物的放置板3,机体1的右侧安装有用于保护机体1的防护板4。
22.进一步的,放置板3包括:丝杆一301、限位板302、橡胶垫303和定位块304,丝杆301嵌入设置于放置板3的正面,丝杆一301的另一端固定有把手,限位板302套接于丝杆301的外侧,橡胶垫303紧密贴合于放置板3的外侧面,定位块304固定于放置板3的背面。
23.进一步的,限位板302的高度大于放置板3的高度,限位板302的外侧划刻有纵横交错的防滑纹理;
24.通过丝杆一301与放置板3螺纹连接,旋转丝杆一301时限位板302相对于放置板3产生相对运动,进而扩大放置板3以及机体1顶部的表面积,便于放置大尺寸的货物;
25.同时,适配货物的尺寸使限位板302抵接于货物的侧面,对货物进行限位,减少输送过程中货物从机体1顶部滑落的情况。
26.进一步的,防护板4包括:连接杆401、套筒402、弹簧403、丝杆二404和挡块405,连接杆401安装于防护板4的左侧,套筒402套接于连接杆401的外侧,弹簧403嵌入设置于套筒402的内部,丝杆二404安装于防护板4的左侧边缘处,橡胶材质的挡块405活动套接于丝杆二404的外侧;
27.通过旋转丝杆二404对挡块405相对于防护板4的位置进行调节,使挡块405能够对放置板3进行遮挡,机器人在行进途中,若遇到障碍物能够通过挡块405与防护板4对机体1以及货物进行遮挡,通过弹簧403的收缩对冲击力进行衰减和吸收,达到保护机体1的效果,同时提高货物运输时的稳定性,避免货物出现倾覆的危险。
28.进一步的,机体1包括:定位杆101和挡板102,定位杆101通过铰链安装于机体1的正面中间位置,挡板102安装于机体1的顶部左右两侧边缘,通过将定位杆101插入定位块304底部的通孔当中,定位杆101即可对放置板3达到稳定的支撑效果;
29.同时,挡板102能够从机体1两侧对货物进行限位,减少货物滑落的情况,带有锁止结构的滚轮2便于机体1灵活移动。
30.工作原理:
31.首先,将放置板3展开,将定位杆101插入定位块304的内部,对放置板3进行支撑,然后,将货物放置于机体1的顶部,旋转丝杆一301将限位板302抵紧于货物的外侧,对货物进行限位;
32.接着,旋转丝杆二404,使挡块405与限位板302平齐,进而避免机体1在行进途中遇到障碍物时世界对货物造成冲击,最终,通过弹簧403的收缩对冲击力进行衰减和吸收,达到保护机体1的效果。
技术特征:
1.一种物流搬运机器人,包括机体(1)和滚轮(2),机体(1)的底部安装有四个滚轮(2),其特征在于:机体(1)的正面安装有便于放置货物的放置板(3),机体(1)的右侧安装有用于保护机体(1)的防护板(4)。2.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述放置板(3)包括:丝杆一(301)、限位板(302)、橡胶垫(303)和定位块(304),所述丝杆一(301)嵌入设置于放置板(3)的正面,所述限位板(302)套接于丝杆一(301)的外侧,所述橡胶垫(303)紧密贴合于放置板(3)的外侧面,所述定位块(304)固定于放置板(3)的背面。3.根据权利要求2所述的一种物流搬运机器人,其特征在于:所述限位板(302)的高度大于放置板(3)的高度,所述限位板(302)的外侧划刻有纵横交错的防滑纹理。4.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述防护板(4)包括:连接杆(401)、套筒(402)、弹簧(403)、丝杆二(404)和挡块(405),所述连接杆(401)安装于防护板(4)的左侧,所述套筒(402)套接于连接杆(401)的外侧,所述弹簧(403)嵌入设置于套筒(402)的内部,所述丝杆二(404)安装于防护板(4)的左侧边缘处,所述挡块(405)活动套接于丝杆二(404)的外侧。5.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述机体(1)包括:定位杆(101)和挡板(102),所述定位杆(101)通过铰链安装于机体(1)的正面中间位置,所述挡板(102)安装于机体(1)的顶部左右两侧边缘。
技术总结
本实用新型涉及机器人技术领域,具体为一种物流搬运机器人,包括机体和滚轮,机体的底部安装有四个滚轮,机体的正面安装有便于放置货物的放置板,机体的右侧安装有用于保护机体的防护板;该种物流搬运机器人,通过设置有挡块,挡块通过丝杆二连接于防护板上,通过旋转丝杆二对挡块的位置进行调节,使挡块与限位板平齐,在遇到障碍物时使挡块能够首先与障碍物接触,并通过弹簧的收缩形变吸收冲击,进而避免货物直接遭受撞击而出现损坏的情况,同时更加全面的对机体达到防护的效果。加全面的对机体达到防护的效果。加全面的对机体达到防护的效果。
技术研发人员:吴少石 盘正青 谭喆聪
受保护的技术使用者:吴少石
技术研发日:2021.04.19
技术公布日:2021/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1