可实现多角度/非连续壁面过渡的铰链型爬壁机器人
1.本实用新型涉及机器人技术,具体为提供一种可以实现多角度/非连续壁面过渡的铰链型爬壁机器人。
背景技术:
2.随着全球化的不断推进,大型船舶、重型机械等大型构件的大型化制造需求不断增加,这些大型构件在制造、使用过程中可能出现缺陷,这些缺陷会严重影响构件质量甚至带来安全问题。在传统的检测、故障诊断中,工人需借助仪器来进行作业,其作业空间狭窄、工作环境差且危险性也比较高。爬壁机器人是一种具有移动和吸附功能并可以在垂直壁面上运动的自动化设备,永磁吸附式爬壁机器人由于磁吸附具有吸附力大、不需要电源驱动,从而被广泛地应用在壁面为导磁材料的作业环境下。现有的爬壁机器人曲面适应性差,行动不够灵活,结构过于复杂,因此应用环境有限。
3.专利文献“一种可自适应多种曲面的履带式爬壁机器人(cn208731086u)”公开了一种爬壁机器人,该机器人包括车体模块和履带模块。其存在问题是连接机构复杂,行走迟缓,无法实现较小的转弯半径,遇到多角度/非连续壁面过渡时无法通过。专利文献“一种铰链机构、机械设备和爬壁机器人(cn209586934u)”提供了一种铰链机构,包括铰座和旋转块。该铰链结构仅有一个自由度,仅能实现一个方向的转动,使用场景将受到极大限制。
4.综上所述,现有的爬壁机器人虽能适应在平面行走,且具有一定的越障功能,但缺乏柔性连接机构,转弯不够灵活,曲面自适应能力差,无法执行多角度/非连续性壁面过渡,尤其是无法通过直角壁面过渡处;此外,上述公开专利中的铰链连接机构结构较复杂,自由度也不足,可以根据爬壁机器人的功能需求作进一步的结构优化。本实用新型针对这些问题研制了一款铰链型爬壁机器人。该机器人系统由两个车体、铰链模块组成,能自适应不同的作业曲面,其模块化程度高、结构简单轻便、运动灵活、环境适应能力强。
技术实现要素:
5.针对现有技术的不足,本实用新型拟解决的技术问题是:提供一种铰链型爬壁机器人,且所述机器人具有模块化程度高、体积小、质量轻、姿态调整灵活、曲面适应性强、越障能力好、集成度高的特点。
6.本技术中多角度指的是不同的壁面过渡处,两壁面之间有一定的夹角,比如直角或钝角,该机器人可越过的两壁面间的夹角不是固定的,是在一个范围内。非连续性是指两个并没有产生相交线的壁面之间的过渡,例如两个间距较小的平行壁面之间的过渡。
7.本实用新型解决所述技术问题的技术方案是:
8.一种可实现多角度/非连续壁面过渡的铰链型爬壁机器人,包含两个车体、铰链模块,所述两个车体通过铰链模块连到一起;其特征在于,所述铰链模块使得前车体相对于后车体具有三个转动自由度。
9.所述车体主要包括:前车体车身上板、前车体车身底板、前车体车身前板、前车体
车身后板、车身侧板、后车体车身上板、后车体车身底板、后车体车身前板、后车体车身后板、步进电机、电机减速器、车轮、数传模块、图传模块、单片机;前车体车身上板(301)、前车体车身后板(302)、前车体车身底板(303)、前车体车身前板(304)和两个车身侧板(103) 形成前车体的车架,后车体车身上板(101)、后车体车身后板(102)、后车体车身底板(104)、后车体车身前板(105)和两个车身侧板(103)形成后车体的车架;
10.以后车体为例,所述后车体车身上板(101)、后车体车身后板(102)、后车体车身底板(104)、后车体车身前板(105)、车身侧板(103)通过螺钉连接组成一个封闭的箱体,即所述壁面过渡铰链机器人后车体(1)的车架,所述步进电机通过螺栓与电机减速器(106) 连接;所述电机减速器(106)固定在后车体车身侧板103上,其输出轴通过键连接方式与车轮(109)相连;前车体(3)的车架及其内部零件与后车体(1)基本相同,不同的是图传模块(305)置于前车体,数传模块(108)置于后车体;
11.图传模块为视频图像的发射端,通过无线远距离传输经由图传模块接收端将收到的视频图像传送到操作人员手中的显示器上,操作人员据此观看车体周围环境情况;所述数传模块为接收端,用于接收操作人员发出的控制指令,然后将指令数据传输到单片机上;所述单片机置于后车体的车架内部,用于接受数传模块的数据指令,然后控制步进电机做出相应的动作;所述车轮是具有多种功能的车轮,可以换成不同属性的车轮,比如在金属壁面上可以使用具有磁吸附能力的磁轮,在其他非金属壁面可以更换为粘接性质的车轮保证其壁面吸附能力。
12.所述铰链模块主要包括:前车体连接件、前连杆、后连杆、后车体连接件。
13.所述后车体连接件通过螺钉与后车体车身前板相连,此连接为刚性连接,所述后连杆与后车体连接件之间在水平纵向方向上采用铰接方式连接,铰接孔轴线与地面平行,从而使两个车体之间具有一个绕x轴的俯仰运动;所述前车体连接件通过螺钉与前车体车身后板相连,此连接为刚性连接,所述前连杆与前车体连接件之间在水平横向方向上采用铜套方式相连,从而使两个车体之间具有一个绕y轴的横滚运动;所述前、后连杆之间在竖直方向上通过铰接方式相连,从而使两个车体之间具有一个绕z轴的横摆运动。所述铰链模块是一个具有三个自由度的结构,确保机器人能跨越多角度/非连续壁面过渡处或者在曲率度较大的曲面上稳定行走。
14.车体前进方向为y轴的正方向,垂直壁面向上方向为z轴的正方向,根据笛卡尔坐标准则确定x轴的正方向;前车体活动角度限制为(
‑
35
°
~+35
°
);后车体的活动角度限制为 (+35
°
~+47
°
);前连杆、后连杆之间的活动角度限制为(
‑
45
°
~+45
°
)。
15.与现有技术相比,本实用新型设计的一种铰链型爬壁机器人具有以下创新点:
16.1、本实用新型模块化程度高,结构紧凑,体积小,轻便简单,携带方便,同时前车体、后车体、铰链三大结构之间具有快速锁死结构(比如用钢珠插销这类的零件来连接),通过销连接方式方便拆卸安装。小体积的模块化设计便于在大型储罐内部开展作业,比如对锅炉内壁进行检测时先将前车体、后车体、车轮、铰链四大结构拆开,由工人逐个送进去,在锅炉内部再进行快速组装最后开展作业,快速锁死结构大大降低了安装时间,提高了工作效率;
17.2、本实用新型两个车体之间用铰链模块连接到一起,两车体之间具有一定的间距,由于单个车体占用空间小,跨越速度快,在转弯、越障、多角度/非连续壁面过渡时一般
前车体先通过,后车体再通过,在此过程中铰链模块使得两车体之间运动姿态调整灵活,环境适应能力强,转弯半径更小,具有良好的越障能力;
18.3、本实用新型的铰链模块具有三个自由度,前车体连接件与前连杆连接处有绕y轴左右横滚的自由度,前连杆与后连杆连接处有绕z轴左右横摆的自由度,后车体连接件与后连杆连接处有绕x轴上下俯仰的自由度。在三个自由度的配合下可以实现爬壁机器人在作业过程中对壁面曲率变化的自适应能力,尤其是在多角度/非连续壁面过渡时,车体在运动过程中后车体连接件与后连杆之间会自适应绕x轴转动形成一定的转角,确保前后车体都能与壁面接触从而顺利通过。此外,车体在转弯过程中,铰链模块中的前连杆与后连杆在二者连接处绕z轴转动一定的角度,使得机器人转弯半径更小,在一些狭小的地方更易通过。此铰链模块也为机器人的越障能力提供了保障,解决了以前机器人在遇到多角度/非连续壁面过渡时无法通过的问题;
19.4、本实用新型中的车轮作为一个独立结构具有可更换性,机器人可以根据作业场景的不同使用不同属性的车轮,比如在大型立面储罐、船舶等金属壁面进行爬壁运动作业时可换成具有磁吸附能力的磁轮;在地面等其他壁面作业时可换成由粘性粘接材料制成的车轮等。
20.5、本实用新型中将车体分为两部分,之间再用铰链模块连接,每个车体上仅有两个轮子,前车体包含图传模块,后车体包含数传模块,铰链模块也是有xyz三个自由度的转动,铰链模块的这种连接方式可以实现多角度的壁面过渡,分开后的车体可以分别先后在壁面直角过渡处通过,也可以通过调节前连杆与前车体连接件(与前车体为刚性连接)之间的角度从而适应不同曲率的金属壁面。
附图说明
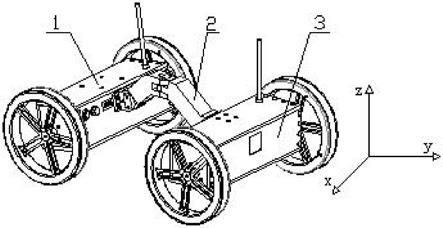
21.图1为本实用新型的整体结构示意图;
22.图2为本实用新型的总装配体的俯视图;
23.图3为车体内部整体结构示意图;
24.图4为车体内部结构的俯视图;
25.图5为铰链模块的结构示意图;
26.图6为限位滑槽和限位柱的安装结构示意图;
27.图7为图5中前连杆和后连杆连接位置的纵向剖面结构示意图;
28.图8为本实用新型运动过程中的转弯示例图;
29.图9为本实用新型在进行阳角直角过渡时的示例图;
30.图10为本实用新型在进行阴角直角过渡时的示例图;
31.图11为本实用新型在进行单轮过障碍物时的示意图;
32.图中:1后车体、2铰链模块、3前车体、101后车体车身上板、301前车体车身上板、 102后车体车身后板、302前车体车身后板、103车身侧板、104后车体车身底板、105后车体车身前板、303前车体车身底板、304前车体车身前板、106电机减速器、107步进电机、108数传模块、109车轮、305图传模块、201后车体连接件、202后连杆、203前连杆、204 前车体连接件、205为端盖、206为内衬轴、207为铜套、01为限位滑槽、02为限位柱。
具体实施方式
33.下面结合实施例及其附图进一步叙述本实用新型。但本技术的保护范围不限于所述实施例的描述范围。
34.xyz坐标轴的定义:车体前进方向为y轴的正方向,垂直壁面向上方向为z轴的正方向,根据笛卡尔坐标准则确定x轴的正方向。其中x轴方向转动是为了给机器人车体模块实现单轮过台阶提供自由度,前车体角度限制为(
‑
35
°
~+35
°
),其目的是为了防止车体模块发生 180
°
反转改变车轮位置,影响机器人运动;后车体上的x轴方向转动是为了给机器人整体车身长度方向提供一个变化余量,能够适应机器人在各种壁面过渡时候的车身变化,其角度限制为(+35
°
~+47
°
),其目的是为了在极限位置实现两节车体的相互约束,即在阴角过渡时,后车体模块给前车体模块一个辅助力帮助其完成过渡,前车体完成过渡后再利用铰链给后车体一个牵引力实现后车体的过渡;铰链中间关节的z轴方向转动主要是提高机器人灵活运动能力,减小机器人转弯半径,其角度限制为(
‑
45
°
~+45
°
),为了防止前后车体在转弯过程中两磁轮吸附影响运动。
35.快速锁死机构指的是铰链和前后车体模块之间的连接机构,主要是利用钢珠插销这类的零件来连接,实现快速安全的安装锁死。
36.一种用于壁面过渡的铰链型爬壁机器人,如图1所示,包含后车体(1)、铰链模块(2) 和前车体(3)。前车体(3)和后车体(1)车架外观相同但内部结构不同,通过铰链模块(2) 相连组成整个爬壁机器人结构。
37.如图2、图3和图4所示,所述铰链型爬壁机器人的车体主要包括前车体车身上板(301)、前车体车身后板(302)、前车体车身底板(303)、前车体车身前板(304)、车身侧板(103)、后车体车身上板(101)、后车体车身后板(102)、后车体车身底板(104)、后车体车身前板(105)、步进电机(107)、电机减速器(106)、车轮(109)、数传模块(108)、图传模块(305)、单片机;前车体车身上板(301)、前车体车身后板(302)、前车体车身底板 (303)、前车体车身前板(304)和两个车身侧板(103)形成前车体的车架,后车体车身上板(101)、后车体车身后板(102)、后车体车身底板(104)、后车体车身前板(105)和两个车身侧板(103)形成后车体的车架。
38.如图2、图3和图4所示,以后车体为例,所述后车体车身上板(101)、后车体车身后板(102)、后车体车身底板(104)、后车体车身前板(105)、车身侧板(103)通过螺钉连接组成一个封闭的箱体,即所述壁面过渡铰链机器人后车体(1)的车架,所述步进电机(107) 通过螺栓与电机减速器(106)连接;所述电机减速器(106)固定在后车体车身侧板103上,其输出轴通过键连接方式与车轮(109)相连;所述车轮(109)可以换成不同属性的车轮,可以根据使用环境进行更换,比如在金属壁面上可以使用具有磁吸附能力的磁轮;前车体(3) 的车架及其内部零件与后车体(1)基本相同,不同的是图传模块(305)置于前车体,数传模块(108)置于后车体;
39.所述图传模块(305)置于前车体的车架内,通过螺钉固定在前车体车身上板(301)上,前车体内的图传模块(305)为视频图像的发射端,通过无线远距离传输将视频图像传送到操作人员手中的显示器上,操作人员可以据此观看车体周围环境情况;所述数传模块(108)置于后车体的车架内,通过螺钉固定到后车体上板(101),数传模块为接收端,用于接收操作人员手中发射端发送过来的控制指令,然后将指令数据传输到单片机上;所述单片
机置于后车体的车架内部,用于接收数传模块(108)的数据指令,然后控制步进电机(107)做出相应的动作。单片机的数量为一个,可选用stc51单片机。图传模块为可以传输视频图像的模块,如2.4g无线wifi视频实时传输模块lc328,数传模块可以使用类似于无线数传模块 srwf
‑
108。
40.如图5所示,所述壁面过渡铰链机器人的铰链模块主要包括:后车体连接件(201)、后连杆(202)、前连杆(203)、前车体连接件(204)。图5所示为该零件的形状结构,作用是连接前后车体,组合到一块后有三个自由度的转动。
41.所述后车体连接件(201)通过螺钉与后车体车身前板(105)相连,此连接为刚性连接,所述后连杆(202)与后车体连接件(201)之间在水平纵向方向上采用铰接方式连接,铰接孔轴线与地面平行,从而使前、后两个车体之间具有一个绕x轴的俯仰转动;所述前车体连接件(204)通过螺钉与前车体车身后板(302)相连,此连接为刚性连接,所述前连杆(203) 与前车体连接件(204)之间采用铜套方式相连,从而使前、后两个车体之间具有一个绕y 轴的横滚转动;所述前连杆(203)与后连杆(202)之间在竖直方向上通过铰接方式相连,铰接孔轴线与地面垂直,从而使前、后两个车体之间具有一个绕z轴的横摆转动,铰接孔轴线与地面垂直。所述铰链模块(2)是一个具有三个自由度的结构,确保机器人能跨越多角度 /非连续壁面过渡处或者在曲率度较大的曲面上稳定行走。
42.后车体连接件(201)具有平面安装板和对称垂直固定在平面安装板上的两个耳座,平面安装板与后车体通过快速拆装结构固定在一起,此时两个耳座与地面保持水平,两个耳座具有螺纹孔,螺纹孔的轴线为x方向;
43.所述后连杆202的一端设置有带通孔的凸出部分,凸出部分能够伸入后车体连接件的两个耳座之间的空间内,并通过铜套207和内衬轴206铰接在一起,同时利用两侧端盖205限制铜套和内衬轴的轴向位置,使得后连杆的凸出部分能相对x轴转动;在凸出部分上还设置有限位滑槽,在后车体连接件201的耳座上相应限位滑槽的位置设置有限位轴(也可用长螺钉代替),限位轴能在限位滑槽的范围内进行移动,能够限制后连杆相对后连杆连接件的活动角度为+35
°
~+47
°
。
44.参见图7,后连杆202的另一端设置有两个耳座,耳座上下分别设置有沉头通孔和螺纹孔,沉头通孔和螺纹孔用于固定长螺钉以充当限位轴,沉头通孔和螺纹孔的轴线平行于z轴,所述前连杆203的一端设置有带通孔的凸出部分,该凸出部分能够伸入后连杆的两个耳座之间的空间内,通过铜套和内衬轴铰接,使后连杆202和前连杆203能够绕z轴摆动,该凸出部分上也设置有限位滑槽,该限位滑槽和固定在后连杆上的限位轴(长螺钉)配合,能够限制前连杆相对后连杆的活动角度范围为
‑
45
°
~+45
°
。
45.在前连杆203的另一端和前车体连接件204之间也设置有限位滑槽和限位轴组合的限位结构,使得前连杆和前车体连接件之间的活动角度范围为
‑
35
°
~+35
°
。
46.本实用新型在实际应用中的工作流程是:
47.移动车体的基本运动过程:前车体上的步进电机(107)设置为前进方向,同时后车体上的步进电机(107)也设置为前进方向,前车体和后车体上每个车轮均由一个步进电机驱动,然后设置速度,给车体四个步进电机同一转速,实现铰链机器型爬壁人的前进运动;前车体上的步进电机(107)设置为后退方向,同时后车体上的步进电机(107)也设置为后退方向,然后设置速度,给车体4个步进电机同一转速,实现铰链型爬壁机器人的后退运动;利
用差速原理进行车体转弯,在前进状态中,当左侧步进电机(107)转速快时,实现车体右转;当右侧步进电机(107)转速快时,实现车体左转。
48.移动车体的基本控制过程:作业过程中操作人员可通过手中的遥控器远程遥控或使用鼠标、键盘等通过人机交互界面下达控制指令,通过无线方式传输数据指令至数传模块,再由数传模块(108)接收到指令信号后将其传递给单片机,单片机再控制步进电机(107)驱动车体行走。同时操作人员根据图传模块(305)反馈回的实时视频画面,继续通过操作遥控器或者人机交互界面通过无线方式将数据指令发给后车体内的数传模块(108),继而通过单片机控制步进电机(107)实时调整机器人的运动速度、方向,实现精准控制。
49.移动车体进行转弯时的基本运动过程:如图8所示,以前车体(3)为例,先设置前车体的两个步进电机(107)为前进方向,再设置速度,设置后车体(1)两侧的步进电机(107) 转速相同并以此为基准利用差速原理,设置前车体(3)左侧的步进电机(107)相对更高的转速、右侧步进电机(107)相对更低的转速,实现前车体(3)右转弯过程;此过程中前车体(3)会相对于后车体(1)有一定的偏角,具体为铰链模块(2)中的前连杆(203)相对于后连杆(202)绕z轴向右转动产生一定的偏角,实现整车右转运动,同时也实现了更小的转弯半径。
50.移动车体进行阳角直角过渡时的基本运动过程:如图9所示,车轮109此时为磁轮,磁轮的吸附能力保证了车体在竖直壁面上稳定爬行,当机器人在壁面上遇到阳角直角过渡时,由于铰链模块(2)有一定的长度距离,前车体(3)先通过直角转折处到达水平壁面上,后车体(1)再通过;在此过程中铰链模块(2)相对于后车体(1)做俯仰运动产生一定的偏角,具体为铰链模块(2)中的后连杆(202)相对于后车体连接件(201)绕x轴旋转产生一定的偏角;同时前车体(3)后端会出现下沉的趋势,后车体(1)前端也会出现下沉的趋势,前车体(3)对后车体(1)产生一定的拉力作用。
51.移动车体进行阴角直角过渡时的基本运动过程:如图10所示,当机器人在壁面上遇到阴角直角过渡时,由于铰链模块(2)有一定的长度距离,前车体(3)先通过直角转折处到达竖直壁面上,磁轮的吸附能力保证了车体在竖直壁面上稳定爬行,后车体(1)再通过;在此过程中铰链模块(2)相对于后车体(1)做俯仰运动产生一定的偏角,具体为铰链模块(2) 中的后连杆(202)相对于后车体连接件(201)绕x轴旋转产生一定的偏角;同时前车体(3) 后端会有一定的上仰趋势,后车体(1)前端也会有一定的上仰趋势,后车体(1)对前车体(3)产生一定的推力作用。在此过程中,后车体连接件201与后车体刚性连接,后车体连接件201会随后车体有前仰趋势,前连杆203和前车体连接件204基本不动。
52.移动车体进行单轮越障时的基本运动过程:如图11所示,机器人进行直线行走且前方突遇障碍物,在不避障的情况下,当前车体(3)的右侧车轮越过障碍物的过程中,前车体(3) 会相对于铰链模块(2)转动一定的角度,具体为铰链模块(2)中的前车体连接件(204)相对于前连杆(203)绕y轴转动一定的角度,由于铰链模块(2)具有一定的长度距离,后车体(1)仍处于水平面上不会发生偏转;后车体(1)通过障碍物的过程中,后车体(1)会相对于前车体(3)转动一定的角度,具体为铰链模块(2)中的前连杆(203)相对于前车体连接件(204)绕y轴转动一定的角度,通过障碍物后各自又恢复到平衡时的位置。
53.本实用新型未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1