一种组合变形式智能汽车的制作方法
1.本实用新型涉及一种汽车,尤其是涉及一种组合变形式智能汽车。
背景技术:
2.随着人们生活的富裕,购买汽车的人越来越多,中国汽车保有量越来越多,城市里通行的汽车越来越多,造成道路拥挤和停车位紧张。对于很多家庭而言,为了通行方便,往往一家购买两辆汽车,这又进一步加大了道路拥挤和停车困难。汽车对于很多家庭而言,主要的用途在于日常上下班通勤,接送孩子上学等常见场景。一般的汽车共有5个座位,在用于日常通勤的场景时,往往汽车里只有1~2人,汽车座位的使用率仅有20%~40%。在接送孩子上学的场景时,考虑到一胎和二胎的两种情况,车内一共有2~3人乘坐,汽车座位使用率仅有40%~60%。从上述客观情况来看,汽车座位的利用率一般不高于60%,造成了浪费。同时,多个行驶目的又增加了消费者开车的距离,增加了消费者的时间、精力和资金成本。现有技术中,一般的汽车由发动机、底盘、车身和电气设备四个基本部分构成,是一个不可分割的完整个体,没法解决上述问题。现在正在发展的自动驾驶技术,也无法解决上述问题。
技术实现要素:
3.本实用新型的目的在于设计一种组合变形式智能汽车,解决上述问题。本实用新型构造巧妙,使用方便,可以让人更便利高效地使用汽车。
4.为了实现上述目的,本实用新型采用的技术方案如下:
5.本组合变形式智能汽车,包含主车系统和子车系统。所述主车系统具有完整的汽车功能和无人自动驾驶功能,可以单独行驶。所述子车系统具有完整的汽车功能和无人自动驾驶功能,可以单独行驶。所述主车系统和所述子车系统可以在变形后组合在一起,形成一个整体汽车系统,具有完整的汽车功能和无人自动驾驶功能,可以正常行驶。
6.优选的,所述主车系统包含主车驱动系统、主车电气系统、主车电池系统、主车无人自动驾驶系统、主车底盘系统、主车车身系统。
7.所述主车车身系统包含主车车身总框架系统、主车车头系统、主车车尾系统、主车前排驾驶舱系统、主车后排乘坐舱系统、主车前部车顶系统和主车后部车顶系统、主车左侧车身系统、主车右侧车身系统。
8.所述主车后排乘坐舱系统包含主车对接组合模块、主车设施增配模块和主车可拆卸后排折叠沙发床。所述主车设施增配模块可以对接所述主车可拆卸后排折叠沙发床。所述主车可拆卸后排折叠沙发床在不用时可以拆下,在使用时可以完全伸展开形成一张两人床,可以半折叠形成一张三人沙发,可以完全折叠收起。
9.所述主车左侧车身系统包括主车左侧前门系统和主车左侧后门系统。所述主车右侧车身系统包括主车右侧前门系统和主车右侧后门系统。
10.所述主车左侧后门系统包含主车左侧后门框架模块、主车左侧后门动力模块、主
车左侧后门组合链接模块、主车左侧后门软蒙皮模块、主车左侧后门链接开门模块、主车左侧后门内加固伸展模块。所述主车左侧后门软蒙皮模块将所述主车左侧后门内加固伸展模块包含在中间,所述主车左侧后门软蒙皮模块和所述主车左侧后门内加固伸展模块能够在所述主车左侧后门动力模块的驱动下同步变形。
11.所述主车右侧后门系统包含主车右侧后门框架模块、主车右侧后门动力模块、主车右侧后门组合链接模块、主车右侧后门软蒙皮模块、主车右侧后门链接开门模块、主车右侧后门内加固伸展模块。所述主车右侧后门软蒙皮模块将所述主车右侧后门内加固伸展模块包含在中间,所述主车右侧后门软蒙皮模块和所述主车右侧后门内加固伸展模块能够在所述主车右侧后门动力模块的驱动下同步变形。
12.所述主车后部车顶系统包括主车后部车顶框架模块、主车后部车顶动力模块、主车后部车顶组合链接模块、主车后部车顶软蒙皮模块、主车后部车顶内加固伸展模块。所述主车后部车顶软蒙皮模块将所述主车后部车顶内加固伸展模块包含在中间,所述主车后部车顶软蒙皮模块和所述主车后部车顶内加固伸展模块能够在所述主车后部车顶动力模块的驱动下同步变形。
13.所述主车底盘系统包含主车底盘模块、主车左前车轮系统、主车左后车轮系统、主车右前车轮系统和主车右后车轮系统。
14.优选的,所述子车系统包含子车底部系统和子车上部系统。
15.所述子车底部系统包含子车驱动系统、子车底盘系统、子车电气系统、子车电池系统和子车无人自动驾驶系统。
16.所述子车上部系统包含子车车身系统、子车虚拟智能机器人系统和子车实体智能机器人系统。所述子车实体智能机器人系统放置于所述子车车身系统里,并随时可以脱离所述子车车身系统单独使用,完全自主行动,或者接受远程操控。
17.所述子车车身系统包含子车车头系统、子车车尾系统、子车左侧车身系统、子车右侧车身系统、子车车顶系统,子车变形系统、子车座位系统和子车底板系统。
18.所述子车车头系统包含智能挡风玻璃模块、车头智能摄像头模块和车头框架模块;所述智能挡风玻璃模块能够显示所述子车虚拟智能机器人系统的影像信息,所述智能挡风玻璃模块和所述车头智能摄像头模块在所述子车虚拟智能机器人系统的支持下相互配合,能够和外界进行交流互动。
19.所述子车右侧车身系统,包含大小相同,左右对称,锁合在一起的子车右侧车身系统a和子车右侧车身系统b,可以在所述子车变形系统的支持下,进行局部变形和整体变形;进行局部变形时,所述子车右侧车身系统a和所述子车右侧车身系统b解锁后各自向相反的方向滑动一段距离,形成一个供乘客上下车的车门;进行整体变形时,所述子车右侧车身系统a和所述子车右侧车身系统b解锁后各自向相反的方向滑动,并一直滑动到所述子车左侧车身系统的后方。
20.所述子车右侧车身系统a包含智能玻璃模块、车身智能摄像头模块和右侧车身系统a框架模块,所述智能玻璃模块能够显示所述子车虚拟智能机器人系统的影像信息,所述智能玻璃模块和所述车身智能摄像头模块在所述子车虚拟智能机器人系统的支持下相互配合,能够和外界进行交流互动。
21.所述子车座位系统,包含有两个可以转动90度的座位a和座位b,和一个可以折叠
隐藏的座位c。所述座位c位于所述座位a和所述座位b的中间。当所述座位a和所述座位b的方向面向所述子车车头系统,所述座位c向下折叠隐藏,此时所述座位c上不可以坐人。当所述座位a和所述座位b向所述子车右侧车身系统方向转动90度,所述座位c向上升起,此时所述座位c上可以坐人。
22.所述子车底盘系统,包含子车底盘模块、子车底盘微驱动行进系统、子车底盘托举推动系统、子车左前车轮系统、子车左后车轮系统、子车右前车轮系统、子车右后车轮系统和子车底盘尾部模块。
23.优选的,所述子车系统和所述主车系统进行组合时,所述子车虚拟智能机器人系统能够分别自主控制所述子车系统和所述主车系统进行组合,所述子车系统采取多次变形和部件分离的方式,使得所述子车上部系统、所述子车底部系统分别先后和所述主车系统进行组合。
24.当所述子车上部系统和所述主车系统组合时,所述子车系统在所述子车虚拟智能机器人系统的控制下,自主行进到靠近所述主车左侧后门系统的、预先设定的位置上,并将所述子车车尾系统对准所述主车左侧后门系统;所述子车座位系统的所述座位a和所述座位b向所述子车右侧车身系统方向转动90度,所述座位c向上升起。
25.所述子车底盘托举推动系统将所述子车上部系统托举上升到设定高度,以使所述子车上部系统的底部和所述主车后排乘坐舱系统的所述主车对接组合模块保持同一水平线;所述子车右侧车身系统进行整体变形,所述子车右侧车身系统a和所述子车右侧车身系统b解锁后各自向相反的方向滑动,滑动到所述子车左侧车身系统的后方。
26.所述子车底盘托举推动系统将所述子车上部系统向所述主车对接组合模块处推动,以使所述子车上部系统和所述主车对接组合模块进行对接组合。所述主车对接组合模块抓取到所述子车上部系统后,在所述子车底盘托举推动系统推动和所述主车对接组合模块的拉动下,将所述子车上部系统全部吸纳到所述主车系统的后排空间内的预设位置;所述子车上部系统进入所述主车系统内的预设位置后,所述子车上部系统的供电由所述主车电池系统提供。所述座位a、所述座位b和所述座位c共同为所述主车系统提供后排乘坐座位,即所述主车系统和所述子车系统共享所述座位a、所述座位b和所述座位c。
27.所述主车左侧后门软蒙皮模块和所述主车左侧后门内加固伸展模块,在所述主车左侧后门动力模块的驱动下,同步变形,向所述主车系统的车尾方向收缩,为所述子车车头系统留出组合的空间;所述子车车头系统,在所述子车变形系统的支持推动下,脱离所述子车车身系统,与所述主车左侧后门组合链接模块组合,与所述主车左侧后门系统组合成完整的一体。
28.所述主车右侧后门软蒙皮模块和所述主车右侧后门内加固伸展模块,在所述主车右侧后门动力模块的驱动下,同步变形,向所述主车系统的车尾方向收缩,为所述子车车尾系统留出组合的空间。所述子车车尾系统,在所述子车变形系统的支持推动下,脱离所述子车车身系统,与所述主车右侧后门组合链接模块组合,与所述主车右侧后门系统组合成完整的一体。
29.所述主车后部车顶软蒙皮模块和所述主车后部车顶内加固伸展模块,在所述主车后部车顶动力模块的驱动下,同步变形,向所述主车系统的车尾方向收缩,为所述子车车顶系统留出组合的空间。所述子车车顶系统,在所述子车变形系统的支持推动下,脱离所述子
车车身系统,与所述主车后部车顶组合链接模块组合,与所述主车后部车顶系统组合成完整的一体。
30.在所述子车上部系统脱离所述子车底部系统后,所述子车底盘托举推动系统复位;所述子车左前车轮系统、所述子车左后车轮系统、所述子车右前车轮系统和所述子车右后车轮系统,脱离所述子车底盘系统,自主行动,分别与所述主车左前车轮系统、所述主车左后车轮系统、所述主车右前车轮系统和所述主车右后车轮系统进行对接组合,即所述子车左前车轮系统和所述主车左前车轮系统对接组合,所述子车左后车轮系统和所述主车左后车轮系统对接组合,所述子车右前车轮系统和所述主车右前车轮系统对接组合,所述子车右后车轮系统和所述主车右后车轮系统对接组合。
31.所述子车底盘尾部模块从垂直状态变形为放平状态;所述子车底部系统在所述子车底盘微驱动行进系统的驱动下,自主行进到所述主车车尾系统的后方,将所述子车底盘尾部模块对准所述主车车尾系统,然后自主行进到所述主车系统之下,并与所述主车底盘系统进行组合,组合后,所述子车电池系统和所述主车电池系统进行电量共享。
32.至此,所述子车系统和所述主车系统完成了组合。
33.优选的,当组合后的所述子车系统和所述主车系统进行分离时,在所述子车虚拟智能机器人系统的控制下,所述子车系统和所述主车系统逐渐进行分离。
34.所述子车底部系统脱离所述主车底盘系统,然后在所述子车底盘微驱动行进系统的驱动下,自主行进到靠近所述主车左侧后门系统的、预先设定的位置上,并将所述子车底盘尾部模块对准所述主车左侧后门系统,所述子车底盘尾部模块从放平状态复位为垂直状态。
35.所述子车左前车轮系统、所述子车左后车轮系统、所述子车右前车轮系统和所述子车右后车轮系统,分别脱离所述主车左前车轮系统、所述主车左后车轮系统、所述主车右前车轮系统和所述主车右后车轮系统,自主和所述子车底盘系统组合。
36.所述子车底盘托举推动系统,将自身升高到设定高度,以和所述主车对接组合模块保持同一水平线。
37.所述子车车头系统、所述子车车尾系统和所述子车车顶系统在所述子车变形系统的支持拉动下,分别和所述主车左侧后门系统、所述主车右侧后门系统和所述主车后部车顶系统分离,然后和所述子车左侧车身系统组合在一起,组成完整的所述子车上部系统。
38.所述子车上部系统在所述主车对接组合模块的推动下,向所述主车左侧后门系统的方向滑动,然后和所述子车底盘托举推动系统对接,接着在所述主车对接组合模块和所述子车底盘托举推动系统的共同驱动下,所述子车上部系统完全脱离所述主车系统,和所述子车底部系统组合在一起。
39.所述子车右侧车身系统进行整体变形复位,所述子车右侧车身系统a和所述子车右侧车身系统b,从所述子车左侧车身系统的后方滑动到初始位置,并锁合在一起。
40.所述子车底盘托举推动系统托举着所述子车上部系统降低高度,进行复位。所述子车座位系统的所述座位a和所述座位b向所述子车车头系统方向转动90度,所述座位c折叠收起。
41.所述主车左侧后门软蒙皮模块和所述主车左侧后门内加固伸展模块,在所述主车左侧后门动力模块的驱动下,同步变形,向所述主车系统的车头方向伸展,进行复位。
42.所述主车右侧后门软蒙皮模块和所述主车右侧后门内加固伸展模块,在所述主车右侧后门动力模块的驱动下,同步变形,向所述主车系统的车头方向伸展,进行复位。
43.所述主车后部车顶软蒙皮模块和所述主车后部车顶内加固伸展模块,在所述主车后部车顶动力模块的驱动下,同步变形,向所述主车系统的车头方向伸展,进行复位。
44.至此,所述子车系统和所述主车系统完成了全部分离和复位。
45.本实用新型的有益效果如下:
46.1、本实用新型具有多种功能,适用于多种场景,为消费者提供多种使用便利。
47.2、本实用新型能够节省消费者的时间和精力。在日常上下班通勤和接送孩子上下学的场景下,主车系统和子车系统可以分别单独使用,分别承担上班通勤和接送孩子上下学的任务,即消费者可以自驾或者乘坐主车系统上下班,其子女可以乘坐子车系统上下学,或者其爱人可以乘坐子车系统上下班,由此,成年消费者能够节省接送家人的时间和精力。
48.3、本实用新型能够为消费者提供更多的乘坐位置。在主车系统和子车系统组合成完整的一体时,最多可供一家5口人同时出行使用;在主车系统和子车系统分别独立,采取前后相随行驶的模式下,最多可供一家8口人同时出行使用,即3个人乘坐子车系统,5个人乘坐主车系统。
49.4、本实用新型能够给消费者提供更多增值功能。在外出旅游的场景下,主车系统中的主车可拆卸后排折叠沙发床,可供睡觉使用;在日常办事的场景下,在子车系统的无人自动驾驶模式下,其子车虚拟智能机器人可以代替消费者外出购物和办理一定的事务;其子车实体智能机器人也可以代替消费者外出办理一定的事务。
50.5、本实用新型合体后只需要1个停车空间,本实用新型分体后,也仅仅需要约1.3个停车空间,能够帮助消费者节省停车成本,帮助城市管理者节省停车空间。
51.6、本实用新型能够帮助消费者降低能源消耗和节省资金成本。在主车系统和子车系统分别独立使用时,因为主车系统减轻了自重,同时减少乘员人数也降低了乘坐人员的重量,减少了行驶目的地的数量,缩短了主车系统的行驶距离,因此可以节省主车系统的能源消耗;子车系统本身自重轻,乘坐人员少,行驶路径短,也减少了总体上的能源消耗,所以,本实用新型能够帮助消费者降低能源消耗,节省能源开支。
附图说明
52.图1是本实用新型的主车系统总体示意图。
53.图2是本实用新型的主车底盘系统示意图。
54.图3是本实用新型的主车车身系统示意图。
55.图4是本实用新型的主车后排乘坐舱系统示意图。
56.图5是本实用新型的主车后部车顶系统示意图。
57.图6是本实用新型的主车左侧车身系统示意图。
58.图7是本实用新型的主车右侧车身系统示意图。
59.图8是本实用新型的子车系统总体示意图。
60.图9是本实用新型的子车底部系统示意图。
61.图10是本实用新型的子车底盘系统示意图。
62.图11是本实用新型的子车上部系统示意图。
63.图12是本实用新型的子车车身系统示意图。
64.图13是本实用新型的子车右侧车身系统示意图。
65.图14是本实用新型的子车座位系统示意图。
66.图15是本实用新型实施例的主车系统左侧视图。
67.图16是本实用新型实施例的子车系统左侧视图。
68.图17是本实用新型实施例的子车系统和主车系统对接组合前就位的俯瞰视图。
69.图18是本实用新型实施例的子车系统和主车系统对接组合前就位的子车系统左侧视图。
70.图19是本实用新型实施例的子车系统的座位旋转和变形后的子车系统左侧视图。
71.图20是本实用新型实施例的子车系统正后视图。
72.图21是本实用新型实施例的子车上部系统升起后的子车系统正后视图。
73.图22是本实用新型实施例的子车右侧车身系统变形后的子车系统正后视图。
74.图23是本实用新型实施例的子车右侧车身系统变形后的子车系统左侧视图。
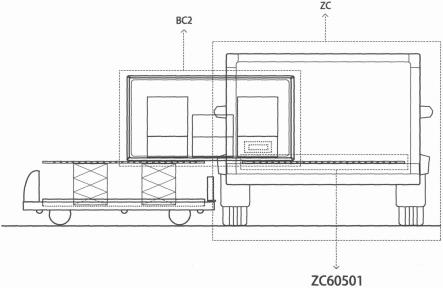
75.图24是本实用新型实施例的子车上部系统向主车系统滑动到半途的主车系统正后视图。
76.图25是本实用新型实施例的子车上部系统向主车系统滑动到半途同时隐去主车车尾系统的主车系统正后视图。
77.图26是本实用新型实施例的子车上部系统完全进入主车系统后的主车系统正后视图。
78.图27是本实用新型实施例的子车车头系统和主车左侧车门系统组合后的主车系统正后视图。
79.图28是本实用新型实施例的子车车尾系统和主车右侧车门系统组合后的主车系统正后视图。
80.图29是本实用新型实施例的子车车顶系统和主车车顶系统组合后的主车系统正后视图。
81.图30是本实用新型实施例的子车底盘托举推动系统复位后的子车底部系统左侧视图。
82.图31是本实用新型实施例的子车车轮和子车底盘系统分离后的子车底部系统左侧视图。
83.图32是本实用新型实施例的子车车轮和主车车轮并列的主车系统正后视图。
84.图33是本实用新型实施例的子车车轮和主车车轮组合合体后的主车系统正后视图。
85.图34是本实用新型实施例的子车底盘尾部模块放平后的子车底部系统左侧视图。
86.图35是本实用新型实施例的子车底部系统行进到主车底盘系统下的主车系统左侧视图。
87.图36是本实用新型实施例的子车底部系统行进到主车底盘系统下的主车系统正后视图。
88.图37是本实用新型实施例的子车底部系统和主车底盘系统组合后的主车系统正后视图。
89.图38是本实用新型实施例的子车系统正前视图。
90.图39是本实用新型实施例的智能挡风玻璃模块上显示子车虚拟智能机器人系统图像信息时的子车系统正前视图。
91.图40是本实用新型实施例的智能玻璃模块上显示子车虚拟智能机器人系统图像信息时的子车系统右侧视图。
92.图41是本实用新型实施例的子车实体智能机器人左侧视图。
93.图中:
94.zc.主车系统,zc1.主车驱动系统,zc2.主车电气系统,zc3.主车电池系统,zc4.主车无人自动驾驶系统,zc5.主车底盘系统,zc6.主车车身系统,zc501.主车底盘模块,zc502.主车左前车轮系统,zc503.主车左后车轮系统,zc504.主车右前车轮系统,zc505.主车右后车轮系统,zc601.主车车身总框架系统,zc602.主车车头系统,zc603.主车车尾系统,zc604.主车前排驾驶舱系统,zc605.主车后排乘坐舱系统,zc606.主车前部车顶系统,zc607.主车后部车顶系统,zc608.主车左侧车身系统,zc609.主车右侧车身系统,zc60501.主车对接组合模块,zc60502.主车设施增配模块,zc60503.主车可拆卸后排折叠沙发床,zc60701.主车后部车顶框架模块,zc60702.主车后部车顶动力模块,zc60703.主车后部车顶组合链接模块,zc60704.主车后部车顶软蒙皮模块,zc60705.主车后部车顶内加固伸展模块,zc60801.主车左侧前门系统,zc60802.主车左侧后门系统,zc6080201.主车左侧后门框架模块,zc6080202.主车左侧后门动力模块,zc6080203.主车左侧后门组合链接模块,zc6080204.主车左侧后门软蒙皮模块,zc6080205.主车左侧后门链接开门模块,zc6080206.主车左侧后门内加固伸展模块,zc60901.主车右侧前门系统,zc60902.主车右侧后门系统,zc6090201.主车右侧后门框架模块,zc6090202.主车右侧后门动力模块,zc6090203.主车右侧后门组合链接模块,zc6090204.主车右侧后门软蒙皮模块,zc6090205.主车右侧后门链接开门模块,zc6090206.主车右侧后门内加固伸展模块,bc.子车系统,bc1.子车底部系统,bc2.子车上部系统,bc101.子车驱动系统,bc102.子车底盘系统,bc103.子车电气系统,bc104.子车电池系统,bc105.子车无人自动驾驶系统,bc10201.子车底盘模块,bc10202.子车底盘微驱动行进系统,bc10203.子车底盘托举推动系统,bc10204.子车左前车轮系统,bc10205.子车左后车轮系统,bc10206.子车右前车轮系统,bc10207.子车右后车轮系统,bc10208.子车底盘尾部模块,bc201.子车车身系统,bc202.子车虚拟智能机器人系统,bc203.子车实体智能机器人系统,bc20101.子车车头系统,bc20102.子车车尾系统,bc20103.子车左侧车身系统,bc20104.子车右侧车身系统,bc20105.子车车顶系统,bc20106.子车变形系统,bc20107.子车座位系统,bc20108.子车底板系统,bc2010101.智能挡风玻璃模块、bc2010102.车头智能摄像头模块,bc2010103.车头框架模块,bc2010401.子车右侧车身系统a,bc2010402.子车右侧车身系统b,bc201040101.智能玻璃模块,bc201040102.车身智能摄像头模块,bc201040103.右侧车身系统a框架模块,bc2010701.座位a,bc2010702.座位b,bc2010703.座位c,dm.地面
具体实施方式
95.为了使本实用新型的目的、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于
解释本实用新型,并不用于限定本实用新型。
96.实施例:
97.图15至图37展示了本实用新型的主车系统和子车系统在子车虚拟智能机器人系统的控制下,自主组合的过程。
98.图15展示的是一个采用了本实用新型的主车系统zc的左侧视图。图16展示的是一个采用了本实用新型的子车系统bc的左侧视图,此图中,子车系统bc内的座位a bc2010701和座位b bc2010702是朝向子车车头系统bc20101的,座位c bc2010703是折叠收起的。此图中,为了显示子车系统bc内的座位,故隐去了子车的左侧车身。
99.组合第一步,子车系统自主行驶到主车系统的左侧的预设位置。如图17所示,俯瞰的视角,子车系统bc自主行驶到主车系统zc的左侧的预设位置,子车系统bc以子车底盘尾部模块bc10208对准主车左侧后门系统zc60802。图18展示的是从子车系统bc的左侧视角,去看图17中子车系统bc和主车系统zc的相对位置。
100.组合第二步,子车系统内的座位旋转和变形。如图19所示,子车系统bc内的座位a bc2010701和座位b bc2010702顺时针旋转90度,面向子车系统bc的右侧,座位c bc2010703展开并升起。
101.组合第三步,子车上部系统上升到设定位置。图20展示的是子车系统bc的正后视图。如图21所示,子车上部系统bc2在子车底盘托举推动系统bc10203的作用下,上升到设定位置,此图中,子车右侧车身系统bc20104没有变形。
102.组合第四步,子车右侧车身系统变形移位。如图22所示,子车右侧车身系统bc20104从图21中的位置,变形移位到子车左侧车身系统bc20103的后方。图23展示的是主车系统zc的正后视图,以及子车上部系统bc2升起和子车右侧车身系统bc20104变形移位后的子车系统bc的左侧视图,此图中,为了显示车内的座位,隐去了子车左侧车身系统bc20103和子车右侧车身系统bc20104。
103.组合第五步,子车上部系统向主车系统内滑动。如图24所示,子车上部系统bc2在子车底盘托举推动系统bc10203的作用下,向主车系统zc内滑动,子车上部系统bc2的一半已经进入主车系统zc内。图25展示的是子车上部系统bc2的一半进入主车系统zc后的透视图,图中,主车对接组合模块zc60501已经和子车上部系统bc2进行了组合,并且拉动子车上部系统bc2进入主车系统zc内。如图26所示,子车上部系统bc2已经完全已经进入主车系统zc内。
104.组合第六步,子车车头系统和主车左侧后门系统组合。如图27所示,子车车头系统bc20101脱离子车上部系统bc2,和主车左侧后门系统zc60802进行组合,并形成完整的一体。
105.组合第七步,子车车尾系统和主车右侧后门系统组合。如图28所示,子车车尾系统bc20102脱离子车上部系统bc2,和主车右侧后门系统zc60902进行组合,并形成完整的一体。
106.组合第八步,子车车顶系统和主车后部车顶系统组合。如图29所示,子车车顶系统bc20105脱离子车上部系统bc2,和主车后部车顶系统zc607进行组合,并形成完整的一体。
107.组合第九步,子车底盘托举推动系统复位。如图30所示,子车底盘托举推动系统bc10203复位。
108.组合第十步,子车车轮系统分别和主车车轮系统组合。如图31所示,子车左前车轮系统bc10204、子车左后车轮系统bc10205、子车右前车轮系统bc10206和子车右后车轮系统bc10207,脱离子车底盘系统bc102,然后准备自主向主车系统的车轮附近行驶,以便到达预设位置,分别与主车系统zc的主车左前车轮系统、主车左后车轮系统、主车右前车轮系统和主车右后车轮系统进行组合。
109.如图32所示,子车左后车轮系统bc10205自主行驶到主车左后车轮系统zc503旁,和主车左后车轮系统zc503并列,子车右后车轮系统bc10207自主行驶到主车右后车轮系统zc505旁,和主车右后车轮系统zc505并列。子车左前车轮系统bc10204、子车右前车轮系统bc10206、主车左前车轮系统zc502和主车右前车轮系统zc504因为被遮挡,所以没有在图32中显示。
110.如图33所示,子车左后车轮系统bc10205和主车左后车轮系统zc503组合合体,子车右后车轮系统bc10207和主车右后车轮系统zc505组合合体。
111.组合第十一步,子车底部系统和主车底盘系统组合。如图34所示,子车底盘尾部模块bc10208从原来的垂直状态变形为平躺状态。如图35所示,子车底部系统bc1在子车底盘微驱动行进系统bc10202的驱动下,行进到主车系统zc之下,准备与主车底盘系统zc5进行组合。图36展示的是子车底部系统bc1行进到主车系统zc之下的正后视图。如图37所示,子车底部系统bc1已经与主车底盘系统zc5完成了组合。
112.至此,通过以上十一步,主车系统zc和子车系统bc已经全部完成了组合。
113.图38至图40展示了本实用新型子车系统的智能机器人系统。
114.本实用新型子车系统具有人工智能功能,能够在无人驾驶的模式下,启用子车虚拟智能机器人系统,自主外出,代替用户办理事务。图38展示的是子车系统bc的正前视图,图中,子车车头系统bc20101包含有智能挡风玻璃模块bc2010101和智能摄像头模块bc2010102。如图39所示,智能挡风玻璃模块bc2010101上显示子车系统bc的子车虚拟智能机器人系统bc202的图像信息,配合智能摄像头模块bc2010102,能够实现人工智能模式下的与外界进行自主对话交流能力。图40展示的是子车系统bc的右侧视图,图中,子车右侧车身系统bc20104上的智能玻璃模块bc201040101显示子车系统bc的子车虚拟智能机器人系统bc202的图像信息,配合车身智能摄像头模块bc201040102,能够实现人工智能模式下的与外界进行自主对话交流能力。
115.图41展示的是子车实体智能机器人系统bc203,能够和子车系统bc进行远程连接,脱离子车系统bc自主行动。
116.以上通过具体的和优选的实施例详细的描述了本实用新型,但本领域技术人员应该明白,本实用新型并不局限于以上所述实施例,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1