一种多功能型鳍臂式履带机器人底盘的制作方法
1.本实用新型涉及机器人技术领域,具体为一种多功能型鳍臂式履带机器人底盘。
背景技术:
2.随着机器人领域的不断发展,应用于特种领域如排爆机器人、消防机器人、救援机器人和军用机器人日益增多,而特种机器人为应对复杂的地形结构一般使用履带式底盘,且机器人为了便于控制大多以电驱动为主要驱动方式。
3.但是现有的履带机器人底盘在实际使用过程中,结构比较简单,体积重量较大,当使用到履带机器人进行侦查时难以适应不用的地形,越障能力较差,比较局限,适用性较差;同时,现有的履带机器人底盘在实际使用过程中,由于履带机器人在移动过程中地形较为颠簸,而现有的履带机器人减震防护性能较差,使得履带机器人的稳定性较差,从而降低了履带机器人的使用性能。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种多功能型鳍臂式履带机器人底盘,克服了现有技术的不足,结构设计简单,有效的解决了现有的履带机器人底盘在实际使用过程中,结构比较简单,体积重量较大,当使用到履带机器人进行侦查时难以适应不用的地形,越障能力较差,比较局限,适用性较差;同时,现有的履带机器人底盘在实际使用过程中,由于履带机器人在移动过程中地形较为颠簸,而现有的履带机器人减震防护性能较差,使得履带机器人的稳定性较差,从而降低了履带机器人的使用性能的问题。
5.为了解决上述技术问题,本实用新型提供了如下的技术方案:
6.一种多功能型鳍臂式履带机器人底盘,包括机器人,所述机器人的底部安装有底盘,所述底盘的底部四周均开设有凹槽,所述凹槽的内部安装有弹簧,所述弹簧的底端安装有安装杆,所述安装杆的底部安装有支撑轮;
7.所述支撑轮贯穿安装杆,安装杆的顶端直径小于凹槽的直径,且安装杆呈倾斜设置。
8.优选的,所述机器人的两侧上方均安装有第一辅助轮,所述机器人的两侧下方均固定有安装板,所述安装板的底部均安装有第二辅助轮,所述第二辅助轮设置有两个,且所述第二辅助轮位于第一辅助轮的正下方。
9.优选的,所述底盘的内部两侧分别安装有第一驱动轴和第二驱动轴,所述第一驱动轴的两端均安装有第一带轮,所述第二驱动轴的外表面两侧均安装有第四带轮,所述第一带轮和第四带轮之间设置有第一履带,所述第一履带分别与第一带轮和第四带轮相啮合。
10.优选的,所述第一履带分别与第一辅助轮和第二辅助轮相啮合,所述第一履带呈三角状设置。
11.优选的,所述第二驱动轴的两端均安装有第二带轮,所述第二带轮的两侧通过连
接板安装有第三带轮,所述第三带轮与第二带轮之间设置有第二履带,所述第二履带与第二带轮和第三带轮相啮合,所述第二履带位于第一履带的外部一侧,且所述第一履带和第二履带的外表面均设置有防滑纹。
12.优选的,所述机器人的顶部中间位置处安装有顶板,所述机器人的顶部一侧分别设置有急停按钮和操作开关。
13.本实用新型实施例提供了一种多功能型鳍臂式履带机器人底盘,具备以下有益效果:通过在第一履带的外部设置有第二履带,当履带机器人在移动过程中使用者便可通过外部操作面板启动第二带轮,使得第二带轮带动第二履带进行翻转,从而将第二履带翻转展开,使得第一履带和第二履带适合多种路面及过台阶,越障能力强,轻松翻越楼梯沟壑,适应沙地、瓦砾、草地等多种复杂地形,提高整体通过性,从而提高了履带机器人的适用性,同时,机器人在移动过程中若遇到颠簸路段时,通过弹簧的弹性以对机器人进行减震缓冲,减少机器人受到的震动,避免机器人滑倒,提高了机器人的稳定性。
14.1、通过设置第二带轮、第三带轮、连接板和第二履带,通过在第四带轮的外部设置有同轴的第二带轮,第二带轮与第三带轮之间设置有第二履带,当履带机器人在移动过程中使用者便可通过外部操作面板启动第二带轮,使得第二带轮带动第二履带进行翻转,从而将第二履带翻转展开,使得第一履带和第二履带适合多种路面及过台阶,越障能力强,轻松翻越楼梯沟壑,适应沙地、瓦砾、草地等多种复杂地形,提高整体通过性,从而提高了履带机器人的适用性。
15.2、通过设置凹槽、弹簧、安装杆和支撑轮,通过在履带机器人的底部设置有支撑轮,由于机器人在移动过程中也将带动支撑轮进行转动,并且此时支撑轮带动安装杆压缩弹簧,使得机器人在移动过程中若遇到颠簸路段时,弹簧将恢复弹性推动安装杆和支撑轮向下移动,底部的支撑轮将先与路面相接触,随后在机器人落下的过程中支撑轮带动安装杆向上移动,从而使得安装杆压缩弹簧收纳在凹槽内,通过弹簧的弹性以对机器人进行减震缓冲,减少机器人受到的震动,避免机器人滑倒,提高了机器人的稳定性。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
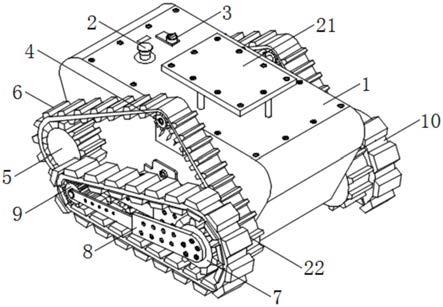
17.图1是本实用新型整体结构示意图;
18.图2是本实用新型第二履带展开结构示意图;
19.图3是本实用新型底盘结构示意图。
20.图中:1、机器人;2、急停按钮;3、操作开关;4、第一辅助轮;5、第一带轮;6、第一履带;7、第二带轮;8、连接板;9、第三带轮;10、第二履带;11、安装板;12、第二辅助轮;13、底盘;14、第一驱动轴;15、第二驱动轴;16、凹槽;17、第四带轮;18、弹簧;19、安装杆;20、支撑轮;21、顶板;22、防滑纹。
具体实施方式
21.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
22.实施例:如图1-3所示,一种多功能型鳍臂式履带机器人底盘,包括机器人1,机器人1的底部安装有底盘13,底盘13的底部四周均开设有凹槽16,凹槽16的内部安装有弹簧18,弹簧18的底端安装有安装杆19,安装杆19的底部安装有支撑轮20,支撑轮20贯穿安装杆19,安装杆19的顶端直径小于凹槽16的直径,以便于安装杆19收纳在凹槽16内,且安装杆19呈倾斜设置,机器人1在移动过程中若遇到颠簸路段时,弹簧18将恢复弹性推动安装杆19和支撑轮20向下移动,底部的支撑轮20将先与路面相接触,随后在机器人1落下的过程中支撑轮20带动安装杆19向上移动,从而使得安装杆19压缩弹簧18收纳在凹槽16内,通过弹簧18的弹性以对机器人1进行减震缓冲,减少机器人1受到的震动,避免机器人1滑倒,提高了机器人1的稳定性。
23.具体的,请参阅图1-2,机器人1的两侧上方均安装有第一辅助轮4,安装板11的底部均安装有第二辅助轮12,通过第一辅助轮4和第二辅助轮12提高第一履带6传动的稳定性。
24.具体的,请参阅图1-3,第一驱动轴14的两端均安装有第一带轮5,第二驱动轴15的外表面两侧均安装有第四带轮17,使得第一驱动轴14带动第一带轮5转动,第二驱动轴15带动第四带轮17转动,第一带轮5和第四带轮17之间设置有第一履带6,第一履带6分别与第一带轮5和第四带轮17相啮合,从而使得第一带轮5和第四带轮17带动第一履带6移动。
25.具体的,请参阅图1-2,第一履带6分别与第一辅助轮4和第二辅助轮12相啮合,第一履带6转动后也将带动第一辅助轮4和第二辅助轮12转动,以提高第一履带6移动的稳定性。
26.具体的,请参阅图1-3,第二驱动轴15的两端均安装有第二带轮7,第三带轮9与第二带轮7之间设置有第二履带10,机器人1在移动过程中使用者便可通过外部操作面板启动第二带轮7,使得第二带轮7带动第二履带10进行翻转,从而将第二履带10翻转展开,通过第一履带6和第二履带10适合多种路面及过台阶,越障能力强,轻松翻越楼梯沟壑,适应沙地、瓦砾、草地等多种复杂地形,提高整体通过性。
27.具体的,请参阅图1-2,机器人1的顶部一侧分别设置有急停按钮2和操作开关3,当机器人1在移动过程中若遇到故障使用者可按下急停按钮2将机器人1停下,同时可通过操作开关3启动或者关闭机器人1。
28.工作原理:首先,通过在履带机器人1的底部设置有支撑轮20,由于机器人1在移动过程中也将带动支撑轮20进行转动,并且此时支撑轮20带动安装杆19压缩弹簧18,使得机器人1在移动过程中若遇到颠簸路段时,弹簧18将恢复弹性推动安装杆19和支撑轮20向下移动,底部的支撑轮20将先与路面相接触,随后在机器人1落下的过程中支撑轮20带动安装杆19向上移动,从而使得安装杆19压缩弹簧18收纳在凹槽16内,通过弹簧18的弹性以对机器人1进行减震缓冲,减少机器人1受到的震动,避免机器人1滑倒,提高了机器人1的稳定性,同时,通过在第四带轮17的外部设置有同轴的第二带轮7,第二带轮7与第三带轮9之间设置有第二履带10,当履带机器人1在移动过程中使用者便可通过外部操作面板启动第二带轮7,使得第二带轮7带动第二履带10进行翻转,从而将第二履带10翻转展开,通过第一履带6和第二履带10适合多种路面及过台阶,越障能力强,轻松翻越楼梯沟壑,适应沙地、瓦砾、草地等多种复杂地形,提高整体通过性,从而提高了履带机器人1的适用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1