用于减小转向系统中的负载的方法与流程
1.本发明涉及一种用于减小转向系统中的负载的方法。此外,本发明涉及一种具有用于执行这种方法的计算单元的控制器以及一种具有用于执行这种方法的计算单元的车辆。
背景技术:
2.车辆和特别是其转向系统必须这样设计,使得其具有高负载能力,以便在整个使用寿命期间保持功能。特别是在崎岖不平的道路上行驶时,在此非常高的负载作用到转向系统上,其中,负载特别是取决于转向系统中的质量和惯性的大小和布置及转向系统的刚度。为了防止损坏,因此通常使用机械尺寸过大的组件,然而由此会增大转向系统的重量并增加成本。
技术实现要素:
3.本发明的目的尤其在于,提出一种用于减小转向系统中的负载的方法,其在效率方面具有改进的特性。该目的通过权利要求1、11和12的特征实现,而本发明的有利设计和改进可以由从属权利要求得到。
4.提出了一种用于特别是在车辆中运行期间并且有利地是在机动车中减小转向系统中的负载的方法,其中,确定特别是转向系统的由作用到转向系统上的外力作用引起的特别是机械的负载,并且在至少一种运行状态下通过操控致动器单元至少部分地并且优选至少大部分地予以补偿,并且其中,特别是为了至少部分地补偿负载,在运行状态下这样操控致动器单元,从而减小转向系统的与外力作用相关的惯性效应。有利地,尤其由作用到转向系统上的外力作用引起的负载在此包括来自地面和/或车辆的周围环境的力作用。尤其是导致转向系统的负载的外力作用在此例如可能由道路的不平坦、坑洼、越过障碍物、在崎岖不平的道路上行驶和/或其他此类特殊事件引起。有利地,外力作用不同于转向运动和/或尤其是由驾驶员在转向系统的转向把手上引起的直接的力作用。此外,在运行状态下,通过操控致动器单元,特别是也可以至少部分地补偿与转向系统作用连接的构件例如横拉杆和/或底盘的负载,由此可以有利地补偿整个车轴的、尤其是前轴的负载。通过这种设计,特别地可以改善效率、尤其是重量效率、构件效率和/或成本效率。此外,可以有利地增加车辆并且特别是转向系统的疲劳强度和/或使用寿命。
[0005]“致动器单元”尤其应理解为至少部分构造成电的和/或电子的单元,该单元设置用于提供力矩和/或力并将其传递到至少一个转向构件。为此,致动器单元优选地包括至少一个电动机,其特别是与转向构件作用连接。此外优选地,致动器单元是转向系统的一部分。此外,“减小转向系统的与外力作用相关的惯性效应”特别是应该被理解为,减小转向系统的由外力作用引起的惯性和/或转向系统的抵抗外力作用的阻力。
[0006]
此外,车辆和/或转向系统尤其可以包括至少一个计算单元,其中,该计算单元尤其设置用于实施用于减小转向系统中的负载的方法。“计算单元”尤其应理解为具有信息输
入、信息处理和信息输出的电的和/或电子的单元。计算单元还有利地具有至少一个处理器、至少一个运行存储器、至少一个输入器件和/或输出器件、至少一个运行程序、至少一个控制例程、至少一个计算例程、至少一个监视例程和/或至少一个评估例程。特别地,计算单元至少设置用于确定由作用到转向系统上的外力作用引起的负载。此外,计算单元尤其设置用于操控致动器单元。在当前情况下,计算单元还特别地设置用于在至少一种运行状态下这样操控致动器单元,使得转向系统的与外力作用相关的惯性效应减小,并且由作用到转向系统上的外力作用引起的负载至少部分地并且优选至少大部分地被补偿。计算单元优选集成到车辆和/或转向系统的控制器中。表述“至少大部分”在此尤其应理解为至少55%、有利地至少75%并且特别有利地至少95%。“设置”尤其应理解为专门编程、设计和/或配备。对象设置用于特定功能尤其应理解为,对象在至少一个应用和/或运行状态下满足和/或实施该特定功能。
[0007]
有利地提出,在运行状态下,借助致动器单元产生抵消转向系统的惯性的补偿力矩和/或抵消转向系统的惯性的补偿力,并且特别是为了至少部分地补偿负载而施加给转向系统。特别地,特别是借助致动器单元产生的补偿力矩和/或特别是借助致动器单元产生的补偿力在此克服外力作用,使得转向系统有利地在外力作用下并且特别是在外力作用的方向上一同移动,和/或减小转向系统抵抗外力作用的阻力。此外特别有利地,尤其借助致动器单元产生的补偿力矩和/或借助致动器单元产生的补偿力被引入到转向系统的转向轴和/或转向系统的转向传动部中。由此可以特别有利地简单地减小转向系统的惯性效应,并因此减小转向系统的负载。
[0008]
还提出,在运行状态下使用负载减小功能来操控致动器单元,其中,负载减小功能特定于行驶情况地,尤其是根据当前行驶情况被激活和/或去激活。特别地,负载减小功能对应于优选存储在计算单元的运行存储器中的软件算法。特别地,计算单元设置用于借助负载减小功能在运行状态中这样操控致动器单元,从而借助致动器单元产生抵消转向系统的惯性的补偿力矩和/或抵消转向系统的惯性的补偿力。有利地,在此为了激活和/或去激活负载减小功能,确定负载特征参量,并且特别是与至少一个极限值进行比较。在本文中,“负载特征参量”尤其应理解为这样的参量,其至少与转向系统的由作用到转向系统上的外力作用引起的尤其是机械的负载相关。特别地,至少借助负载特征参量,可以推断转向系统和/或至少一个转向构件的尤其是机械的负载和/或负荷,和/或可以确定转向系统和/或至少一个转向构件的尤其是机械的负载和/或负荷。此外有利地,负载特征参量与当前行驶情况相关。因此优选地,可以至少借助负载特征参量推断当前的行驶情况,和/或确定当前的行驶情况。此外优选地,负载特征参量被连续地确定,或者在整个监视时间间隔期间被监视,并且评估负载特征参量随时间的变化,以确定负载和/或当前的行驶情况。由此特别是可以对转向系统中的负载做出情境反应。尤其是在此可以确保,在转向系统中的负载低于极限值的正常行驶情况下,察觉不到转向行为和/或转向感觉的变化。
[0009]
此外提出,确定与负载相关的负载参量,尤其是上面已经提及的负载特征参量,其中,如果负载特征参量超过特别是被规定的和/或可规定的第一极限值,则将负载减小功能激活,并且如果负载特征参量低于特别是被规定的和/或可规定的第二极限值,则将负载减小功能去激活。特别地,第一极限值和第二极限值可以不同,其中,第二极限值有利地低于第一极限值。由此特别地可以实现有利的滞后行为。此外可以有利地确保,负载减小功能即
使在负载波动的情况下也保持激活。然而替代地,第一极限值和第二极限值也可以相同,由此尤其可以实现对外部负载的规定的反应。
[0010]
如果负载减小功能和特别是补偿力矩和/或补偿力在激活时被显现和/或在去激活时被隐藏,则尤其可以实现负载减小功能的特别不引人注意的激活和/或去激活。负载减小功能的激活和/或去激活在此优选逐渐地或相继地并且特别地不突然地发生。特别优选地,负载减小功能的激活和/或去激活借助连续的并且优选地在每一点处可微分的函数、特别是渐近函数、s形函数或有利地斜坡函数来进行。
[0011]
在一种特别优选的设计中提出,在运行状态下,通过操控致动器单元,在伺服系中存在的至少一个负载至少部分地并且优选至少大部分地被补偿。伺服系在此尤其由转向系统的转向传动部限定。由此尤其可以有利地减小在转向系统的伺服系中的负载。
[0012]
替代地或附加地提出,在运行状态中通过操控致动器单元至少部分地并且优选至少大部分地补偿在转向系中存在的至少一个负载。转向系在此尤其由转向系统的转向轴限定。由此特别是可以有利地减小在转向系统的转向系中的负载。
[0013]
特别优选地,在伺服系中存在的负载和在转向系中存在的负载被补偿,其中,总负载尤其对应于齿条总力。由此特别是可以有利地减小整个转向系统中的负载。
[0014]
致动器单元例如可以构造为附加的致动器,并且仅设置用于减小转向系统中的负载。此外,特别是在转向系统为线控转向系统的情况下,也可以采用反馈致动器作为致动器单元,用于为转向把手提供复原力矩。然而,如果将用于提供转向力矩的电动转向致动器用作致动器单元,则尤其可以实现特别简单和/或成本低廉的构造。“转向致动器”在上下文中尤其应理解为致动器单元,其设置用于提供转向力矩并且由此有利地影响车辆的行驶方向。优选地,转向致动器设置用来提供用于支持施加在转向把手上的驾驶员手动力矩的转向力矩和/或用于自动和/或自主地控制车辆的行驶方向的转向力矩。转向致动器在此可以特别地布置在转向系的区域中,并且特别地可以与转向系统的转向轴耦接。然而有利地,转向致动器布置在伺服系的区域中,并且特别是与转向系统的转向传动部耦接。
[0015]
此外提出,为了确定特别是由作用到转向系统上的外力作用引起的负载,监视并且特别是评估致动器单元的至少一个运行参量和/或转向系统的转向把手的运动。运行参量在此优选是致动器单元的特别地由外力作用引起的加速度,和/或与加速度相关的运行参量,例如致动器单元的运行电压和/或运行电流。此外优选地,为了监视转向把手的运动,使用至少一个运动传感器,该运动传感器特别地设置用于检测与转向把手的运动相关的运动信号。此外,为了确定特别是由作用到转向系统上的外力作用引起的负载,可以有利地考虑特别是具有主导惯性的致动器单元和/或转向把手和/或转向把手的外围组件的至少一个惯性和有利的惯性力矩。由此可以尤其实现特别灵活和/或准确地确定负载。
[0016]
用于减小转向系统中的负载的方法在此不应限于上述应用和实施方式。特别地,用于减小转向系统中的负载的方法可以具有不同于此处提到的数量的各个元件、构件和单元,以便实现此处描述的工作方式。
附图说明
[0017]
其他优点从下面的附图描述中得到。在附图中示出了本发明的一个实施例。
[0018]
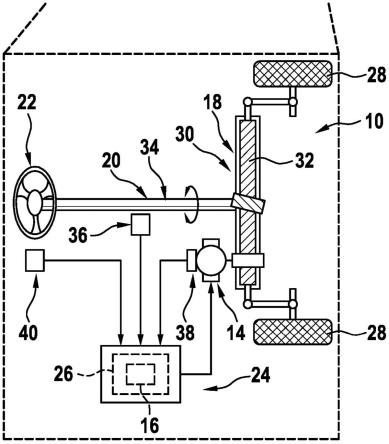
图1a-b以简化图示出了具有转向系统的示例性车辆,和
[0019]
图2示出了具有用于减小转向系统中的负载的方法的主要方法步骤的示例性流程图。
具体实施方式
[0020]
图1a和1b以简化图示出了例如构造为具有多个车轮28和转向系统10的乘用车辆的车辆12。转向系统10与在当前情况下特别是构造为前轮的车轮28作用连接,并且设置用于影响车辆12的行驶方向。此外,转向系统10在当前情况下构造为电动支持的转向系统,并且因此具有伺服转向形式的辅助力支持装置。然而原则上也可想到,将转向系统构造为液压支持的转向系统,尤其是具有液压辅助力支持装置的转向系统。此外,转向系统原则上也可以构造为线控转向系统。
[0021]
转向系统10包括:在当前情况下例如构造为方向盘的转向把手22,用于施加驾驶员的手动力矩;转向传动部30,例如构造为齿条式转向传动部,其包括转向调节元件32并设置用于将转向把手22处的转向预定转换为车轮28的转向运动;和转向轴34,用于将转向把手22特别是机械地与转向传动部30连接。转向传动部30限定了转向系统10的伺服系18。转向轴34限定了转向系统10的转向系20。替代地,转向把手也可以构造为转向杆或转向球等。此外还可考虑完全省去转向把手。此外,转向轴也可以仅暂时将转向把手与转向传动部连接,和/或具有机械分离部,例如在线控转向系统中。
[0022]
此外,转向系统10包括致动器单元14。致动器单元14至少部分地构造成电的和/或电子的。在当前情况下,致动器单元14构造为转向致动器。致动器单元14与转向传动部30作用连接。致动器单元14与转向传动部30耦接,并且特别是与转向调节元件32耦接。致动器单元14设置用于提供转向力矩,以支持施加在转向把手22上的驾驶员手动力矩,并传递到转向调节元件32。为此,致动器单元14包括至少一个电动机。在当前情况下,电动机尤其构造为永磁的同步电动机,并且设置用于产生转向力矩。然而原则上,致动器单元也可以包括多个电动机。此外,致动器单元也可以构造为反馈致动器,或构造为不同于转向致动器和反馈致动器的附加致动器。此外,致动器单元也可以包括多个致动器,例如转向致动器和反馈致动器。
[0023]
此外,转向系统10包括至少一个转向传感器36,转向传感器布置在转向轴34上并且本身是已知的。转向传感器36构造为转矩传感器。转向传感器36设置用于检测与转向把手22的操纵相关的转向信息,特别是施加在转向把手22上的驾驶员手动力矩和/或转矩。在当前情况下,转向传感器36设置用于检测扭杆信号。替代地,转向传感器也可以构造为不同于转矩传感器的传感器,例如转动角传感器和/或组合的转矩和转动角传感器。此外,也可以省去转向传感器。
[0024]
转向系统10还包括至少一个分配给致动器单元14的运行传感器38。运行传感器38构造为转子位置传感器,并且设置用于检测致动器单元14的至少一个运行参量,在当前情况下特别是电动机的转子位置信号。然而,替代地或附加地,运行传感器也可以构造为不同于转子位置传感器的传感器,例如加速度传感器、固体噪声传感器、电压传感器、电流传感器和/或温度传感器。然而,原则上也可以省去运行传感器。
[0025]
此外,转向系统10包括至少一个运动传感器40。运动传感器40不同于转向传感器36和运行传感器38。运动传感器40构造为速度传感器。运动传感器40构造为方向盘传感器,
并且布置在转向把手22的区域中。运动传感器40设置用于检测与转向把手22的运动相关的运动信号,在当前情况下尤其是速度信号。然而,替代地,运动传感器也可以构造为不同于速度传感器的传感器,例如位置传感器、距离传感器、加速度传感器和/或固体噪声传感器,并且尤其设置用于检测不同于速度信号的运动信号。此外,运动传感器原则上也可以布置在转向轴的区域中,有利地在转向中间轴的上方。此外,也可以省去运动传感器。
[0026]
此外,车辆12具有控制器24。控制器24例如构造为转向控制器,并且因此是转向系统10的一部分。控制器24具有与致动器单元14的电连接。此外,控制器24与转向传感器36、运行传感器38和运动传感器40电连接。控制器24设置用于接收来自转向传感器36的扭杆信号、来自运行传感器38的运行参量和来自运动传感器40的运动信号。此外,控制器24设置用于操控致动器单元14。
[0027]
为此,控制器24包括计算单元26。计算单元26包括至少一个例如微处理器形式的处理器(未示出)和至少一个运行存储器(未示出)。此外,计算单元26包括至少一个存储在运行存储器中的运行程序,运行程序具有至少一个控制例程、至少一个计算例程、至少一个监视例程及至少一个评估例程。然而原则上也可想到,控制器与转向系统分开地构造。在这种情况下,车辆例如可以具有带有中央计算单元的单个中央控制器。
[0028]
特别是在崎岖不平的道路上行驶时,非常高的负载作用到转向系统10上,其中,负载取决于转向系统10中的质量和惯性的大小和布置以及转向系统10的刚度和尤其是伺服系18以及转向系20的刚度。负载在此基本上由转向系统10被支撑在地面上或道路上而引起。
[0029]
为了减小转向系统10上的负载,因此提出了一种相应的方法,其中在当前情况下,计算单元26设置用于实施该方法,并且为此特别是具有带有相应程序代码段的计算机程序。
[0030]
在当前情况下,确定转向系统10的由作用到转向系统10上的外力作用引起的负载,并且在至少一种运行状态下通过操控致动器单元14予以补偿。在此负载包括来自地面和/或车辆12的周围环境的力作用,并且例如可以由道路的不平坦和/或由在崎岖不平的道路上行驶引起。
[0031]
为了补偿负载,在运行状态中这样操控致动器单元14,使得转向系统10的与外力作用相关的惯性效应减小。为此,借助致动器单元14产生抵消转向系统10的惯性并且克服外力作用的补偿力矩,并施加给转向系统10,使得转向系统10在外力作用下并且特别是在外力作用的方向上一同移动,并且减小转向系统10抵抗外力作用的阻力。在当前情况下,转向系统10的惯性的影响因此被最小化,由此可以减小在转向系统10的相应的要害位置上的负载。
[0032]
为了操控致动器单元14,计算单元26具有尤其存储在计算单元26的运行存储器中的在运行状态下使用的负载减小功能16。借助负载减小功能16,致动器单元14在此这样操控,从而产生补偿力矩。负载减小功能16还专门针对行驶情况并且特别是根据当前行驶情况被激活和去激活。在转向系统10中的负载小的正常行驶情况下,负载减小功能16被去激活,由此驾驶员不会察觉到转向行为和/或转向感觉的变化。而在有负载的情况下,例如当行驶在崎岖不平的道路上时,负载减小功能16被激活,以减小转向系统10上的负载。因此,负载减小功能16有利地不是永久激活的,并且仅在需要时被接通。
[0033]
为了激活和去激活负载减小功能16,确定与由作用到转向系统10上的外力作用引起的负载和/或与当前行驶情况相关的负载特征参量。负载特征参量在此被连续地确定,或者在整个监视时间间隔期间被监视。此外,负载减小功能16在负载特征参量超过第一极限值时被激活,并且在负载特征参量低于不同于第一极限值的第二极限值时被去激活,由此特别是可以实现相应的滞后行为。
[0034]
此外,负载减小功能16以及在当前情况下尤其是补偿力矩可以在激活时显现,并且在去激活时隐藏,由此特别是可以实现以特别不引人注意的方式进行激活和/或去激活。为此有利地使用斜坡函数。然而,替代地,显现和/或隐藏也可以使用不同于斜坡函数的函数来发生,例如渐近函数。此外,也可以省去显现和/或隐藏。
[0035]
原则上,负载至少基本上由两个主要部分组成,即转向传动部30中的和/或伺服系18中的负载以及转向轴34中的和/或转向系20中的负载。
[0036]
根据第一实施方式,因此可想到,仅减小伺服系18中的负载。在这种情况下,致动器单元14在运行状态中这样操控,使得在伺服系18中存在的负载被补偿。
[0037]
可以借助以下关系式来确定伺服系18中的负载:
[0038][0039]
在此,ms描述了表征伺服系18中的负载的在致动器单元14的电动机的马达轴上的总转矩,该总转矩由第一或发电机的分量m
s,g
即伺服系18的加速度和第二或马达的分量m
s,m
即作用在致动器单元14的电动机的电机轴上的电机力矩组成,而js表征致动器单元14的惯性,并且as表征致动器单元14的加速度、特别是转子加速度。
[0040]
在这种情况下,为了确定负载,特别是发电机的分量m
s,g
形式的负载,因而对致动器单元14的至少一个运行参量,在当前情况下尤其是致动器单元14的加速度予以监视和评估。此外,为了确定负载,考虑致动器单元14的至少一个惯性。此外,马达的分量m
s,m
可以借助致动器单元14的另一运行参量,在当前情况下尤其是电动机的运行电流和/或相电流来确定。此外可想到,考虑另一个转向构件的至少一个基本惯性,以确定伺服系18中的负载。
[0041]
对于补偿力矩m
κ1
,在这种情况下适用的是:
[0042]mk1
=-msꢀꢀ
(2)
[0043]
然而,替代地,原则上还可想到,借助操控致动器单元14仅补偿由发电机的分量m
s,g
产生的负载或由马达的分量m
s,m
产生的负载,由此可以至少减小在转向系统10和特别是伺服系18中的负载。
[0044]
根据第二实施方式可想到,仅减小转向系20中的负载。在这种情况下,致动器单元14在运行状态中这样操控,使得在转向系20中存在的负载被补偿。
[0045]
转向系20中的负载可以借助以下关系式确定:
[0046][0047]
在此m
l
描述了表征伺服系18中的负载的在转向把手22的区域中的总转矩,该总转矩由发电机的另一分量m
l,g
和驾驶员手动力矩m
l,f
组成,而j
l
表征转向把手22的惯性,并且表征转向把手22的特别是角加速度形式的加速度。
[0048]
在这种情况下,为了确定特别是发电机的另一分量m
l,g
形式的负载,对转向把手22的借助运动传感器40检测到的至少一个运动予以监视和评估。为此,借助运动传感器40检测与转向把手22的运动速度相关的且不同于加速度信号的运动信号,然后由该运动信号计
算出与转向把手22的运动相关的加速度信号。加速度信号有利地借助求取梯度并且特别是使用差商来计算。然而,替代地,也可以使用另一种类型的微分计算,或者可以直接检测与转向把手的运动相关的加速度信号。此外,为了确定负载,考虑转向把手22的至少一个惯性。此外,可以借助来自转向传感器36的扭杆信号和/或借助来自运动传感器40的运动信号来确定驾驶员手动力矩m
l,f
。此外可想到,考虑另一个转向构件的至少一个基本惯性,以确定转向系20中的负载。
[0049]
对于补偿力矩m
κ2
,在这种情况下适用的是:
[0050]mk2
=-m
l
·i·
η
ꢀꢀ
(4)
[0051]
在此i描述了致动器单元14的传动比,而η定义了相应的效率。
[0052]
然而,替代地,原则上也可想到,借助操控致动器单元14仅补偿由发电机的另一分量m
l,g
产生的负载或由驾驶员手动力矩m
l,f
产生的负载,由此可以至少减小在转向系统10和特别是转向系20中的负载。
[0053]
此外根据第三实施方式可想到,减小伺服系18中的负载和转向系20中的负载。在这种情况下,致动器单元14在运行状态中这样操控,使得在伺服系18中存在的负载和在转向系20中存在的负载被补偿。
[0054]
在这种情况下,总负载(特别对应于齿条总力)借助以下关系式得到:
[0055]
m=ms·is
·
ηs+m
l
·il
·
η
l
ꢀꢀ
(5)
[0056]
在此m描述了总负载,而is和ii,是伺服系18和转向系20中的相应的传动比,而ηs和η
l
是伺服系18和转向系20中的相应的效率。
[0057]
对于总补偿力矩m
κ
,在这种情况下适用的是:
[0058]
mk=-m
·i·
η
ꢀꢀ
(6)
[0059]
在此i描述了致动器单元14的传动比,而η定义了相应的效率。
[0060]
最后,图2示出了具有用于减小转向系统10中的负载的方法的主要方法步骤的示例性流程图。
[0061]
在方法步骤50中,确定转向系统10的由作用到转向系统10上的外力作用引起的负载。为此,监视和评估致动器单元14的至少一个运行参量和/或转向把手22的运动。该负载在此可以对应于在伺服系18中出现的负载和/或在转向系20中出现的负载。此外,连续地确定与由作用到转向系统10上的外力作用引起的负载和/或与当前驾驶状况相关的负载特征参量,并将其与第一极限值进行比较。如果负载特征参量超过第一极限值,则执行方法步骤52。
[0062]
在方法步骤52中,将负载减小功能16激活,其中,优选地显现负载减小功能16。
[0063]
在方法步骤54中,在使用负载减小功能16的情况下这样操控致动器单元14,从而产生抵消转向系统10的惯性并且克服外力作用的补偿力矩。将补偿力矩施加给转向系统10,使得转向系统10在外力作用下并且特别是在外力作用的方向上一同移动,并且减小转向系统10抵抗外力作用的阻力。由此可以减小转向系统10的与外力作用相关的惯性效应,并且可以至少部分地补偿转向系统10中的负载。此外,还确定负载特征参量,并将其与第二极限值进行比较。如果负载特征参量低于第二极限值,则执行方法步骤56。
[0064]
在方法步骤56中,将负载减小功能16去激活,其中,优选将负载减小功能16隐藏。
[0065]
图2中的示例性流程图在此要尤其仅示例性地描述一种用于减小转向系统10中的
负载的方法。特别地,各个方法步骤也可以改变,或者可以添加额外的方法步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1