一种自适应助力式汽车电动转向控制系统
1.本发明涉及一种汽车电动转向控制系统,属于汽车设计领域。
背景技术:
2.现阶段,对于汽车电动转向系统的转向助力值分析研究还不深入,一般仅仅分析在不同车速以及不同路面阻力情况下,电动转向系统为汽车转向提供不同的转向助力值。但是没有分析汽车在不稳定运行状态,如何通过电动转向控制系统改变汽车的转向助力值,从而维持汽车的操纵稳定性。因此本发明依据汽车的运行状态,通过控制汽车电动转向控制系统中电磁离合器、电机的工作状态,自适应调节转向助力,提高汽车的操纵稳定性。
技术实现要素:
3.针对现有技术的不足,本发明可以解决的问题是提出一种自适应助力式汽车电动转向控制系统,以汽车动力学理论为基础,通过车速传感器、转矩传感器、方向盘转角传感器、汽车横摆角速度传感器、侧向加速度传感器、车身高度传感器,确定汽车的运行状态,并以此为基础,自适应汽车的运行状态,控制电动转向控制系统中电机、电磁离合器的工作电压,改变电机的助力值、转向角度、转动方向以及电磁离合器的结合强度,维持汽车的操纵稳定性,提高汽车的运行安全。
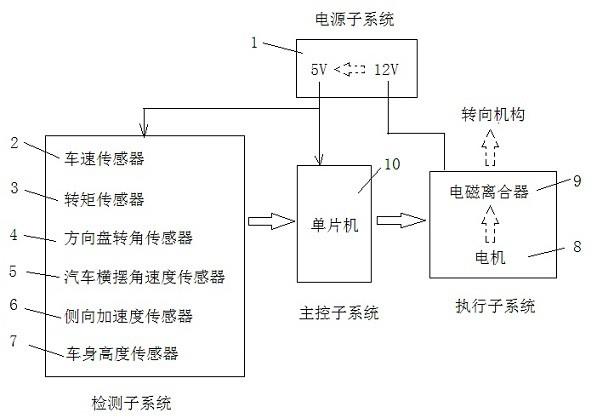
4.本发明解决技术问题所采用的技术方案是:一种自适应助力式汽车电动转向控制系统,其特征是包括以下具体方案:第一步,由电源子系统、检测子系统、执行子系统、主控子系统组成;第二步,电源子系统包括12v和5v电压,为检测子系统、执行子系统、主控子系统供电,其中,12v电源为汽车点火开关闭合后所获得的直流电压,为执行子系统的电机、电磁离合器供电,5v电源是通过电源降压芯片将汽车蓄电池12v转为5v电源,为检测子系统、主控子系统供电;第三步,检测子系统由车速传感器、转矩传感器、方向盘转角传感器、汽车横摆角速度传感器、侧向加速度传感器、车身高度传感器组成,用于检测汽车的运行状态,包括:不足转向、过度转向、中性转向、侧滑、侧翻,五种运行状态,并将检测信息以电压值方式传递给主控子系统;第四步,执行子系统由电机、电磁离合器组成,电机用于提供转向助力值和转向角度、转动方向,电磁离合器通过改变工作电压,调节自身的结合强度,从而自适应调节经由电磁离合器输出给汽车转向系统的电机产生的转向助力值;第五步,主控子系统由单片机组成,首先,主控子系统依据车速传感器与转矩传感器,得到电机转向助力的初始值,再依据汽车的特征车速与实际车速的比值,确定汽车的运行状态,包括不足转向、过度转向、中性转向三种状态,然后依据汽车的运行状态,得到电机转向助力的修正值,主控子系统依据电机转向助力的初始值与修正值之和,控制电机的转向助力值以及转向角度、转动方向;
其次,主控子系统依据车速传感器、汽车横摆角速度传感器、方向盘转角传感器,确定汽车是否处于侧滑状态,从而控制电磁离合器的工作电压,调节电磁离合器的结合强度,自适应调节经由电磁离合器输出给汽车转向系统的电机产生的转向助力值;最后,主控子系统依据侧向加速度传感器、车身高度传感器,确定汽车是否处于临近侧翻危险状态,从而控制电磁离合器的工作电压,调节电磁离合器的结合强度,自适应调节电磁离合器输出给汽车转向系统的电机产生的转向助力值;第六步,主控子系统具有自学习功能,可以记忆不同汽车运行状态下,电磁离合器、电机的工作电压,用于再次出现相同汽车运行状态时使用;第七步,主控子系统具有安全保护功能,当电磁离合器、电机的工作电流超过限定的最大值或转向系统发生故障时,主控子系统自动断开电磁离合器、电机的电源,保证电动转向控制系统的安全。
5.本发明的有益效果是:自适应汽车的运行状态,调节电机的转向助力值、转向角度、转动方向以及电磁离合器自身的结合强度,提高汽车的操纵稳定性。本系统结构简单、安装方便、成本低,可以广泛地应用于各种汽车。
6.附图附图1是本发明的系统构成示意图。
7.1-电源,2-车速传感器,3-转矩传感器,4-方向盘转角传感器,5-汽车横摆角速度传感器,6-侧向加速度传感器,7-车身高度传感器,8-电机,9-电磁离合器,10-单片机。
具体实施方式
8.下面结合附图对本发明的具体实施方式作进一步详细地描述。
9.一种自适应助力式汽车电动转向控制系统,由电源子系统、检测子系统、执行子系统、主控子系统组成,如图1。
10.1.电源子系统电源子系统1包括12v和5v电压,为检测子系统、执行子系统、主控子系统供电,其中,12v电源为汽车点火开关闭合后所获得的直流电压,为执行子系统的电机8、电磁离合器9供电,5v电源是通过电源降压芯片将汽车蓄电池12v转为5v电源,为检测子系统、主控子系统供电;2.检测子系统检测子系统由车速传感器2、转矩传感器3、方向盘转角传感器4、汽车横摆角速度传感器5、侧向加速度传感器6、车身高度传感器7组成,用于检测汽车的运行状态,包括:不足转向、过度转向、中性转向、侧滑、侧翻,五种运行状态,并将检测信息以电压值的方式传递给主控子系统。
11.对于该自适应助力式汽车电动转向控制系统,车速传感器2用于检测汽车车速信号,优选共用原车的车速传感器。
12.对于该自适应助力式汽车电动转向控制系统,转矩传感器3的作用是测量转向盘与转向器之间的相对转矩。转矩传感器3优选滑动可变电阻式扭矩传感器,输出信号正常范围在1~4v之间。根据车速传感器2以及转矩传感器3的信号,得到电机8转向助力的初始值。
13.对于该自适应助力式汽车电动转向控制系统,方向盘转角传感器4安装在转向柱
模块上。方向盘转角传感器4用于检测方向盘的中间位置、转动方向、转动角度和转动速度,用于控制电机的转向助力、转向角度、转动方向。优选光电式转角传感器。
14.对于该自适应助力式汽车电动转向控制系统,汽车横摆角速度传感器5用于检测汽车转向时产生的离心率,用于判断汽车是否打滑。优选汽车横摆角速度传感器的额定电压为5v。
15.对于该自适应助力式汽车电动转向控制系统,侧向加速度传感器6用于检测汽车倾斜角,用于判断汽车是否发生倾斜。优选侧向加速度传感器额定电压为5v。
16.对于该自适应助力式汽车电动转向控制系统,车身高度传感器7用于检测汽车质心的高度。优选车身高度传感器额定电压为5v。
17.3.执行子系统执行子系统由电机8、电磁离合器9组成。电机8用于提供转向助力和转向角度、转动方向;电磁离合器9通过改变工作电压,调节自身的结合强度,从而自适应调节经由电磁离合器9输出给汽车转向系统的转向助力值。
18.对于该自适应助力式汽车电动转向控制系统,电机8优选最大电流为30a左右,电压为直流12v,额定转矩为10n
·
m。
19.对于该自适应助力式汽车电动转向控制系统,电磁离合器9依据主控子系统控制的工作电压,通过改变电磁离合器9的结合强度,在电机8输出相同助力的情况下,可以传递不同的转向助力值,维持汽车的操纵稳定性。优选干式电磁离合器。
20.4.主控子系统(1)主控子系统由单片机10组成,主控子系统依据车速传感器2与转矩传感器3,得出电机8转向助力的初始值。优选通过仿真方法得出车速传感器2、转矩传感器3与汽车转向时侧向力之间的对应数据,再应用响应面法建立车速传感器2、转矩传感器3与电机8转向助力之间的二阶响应面模型。主控子系统再通过建立的二阶响应面模型计算得出电机8转向助力的初始值。
21.(2)主控子系统依据汽车的特征车速与实际车速的比值,确定汽车的运行状态,包括不足转向、过度转向、中性转向三种状态,对应系统稳定、系统临界稳定、系统不稳定,然后依据汽车的运行状态,从而计算得出电机8转向助力的修正值。
22.首先,优选采用如下方法判断汽车的运行状态:其中,v为汽车实际车速,通过车速传感器2获得;为汽车的特征车速,通过计算获得,,l为轴距,m为汽车质量,为汽车质心到汽车前轴、后轴的距离;分别为汽车前、后轴侧偏刚度。
23.其次,计算电机转向助力的修正值:,为期望汽车转角,为转弯半径。
24.与方向盘转角传感器4得到的实际转角之间的差值,即为电机8转向助力的修正值,也就是对转向角度的修正。
25.主控子系统依据电机8助力的初始值与修正值之和,控制电机8的转向助力值以及转向角度。
26.(3)主控子系统依据车速传感器2、汽车横摆角速度传感器5、方向盘转角传感器4,确定汽车是否处于侧滑状态,从而控制电磁离合器9的工作电压,调节电磁离合器9的结合强度,自适应调节经由电磁离合器9输出给汽车转向系统的电机8产生的转向助力值。
27.电磁离合器9输出给汽车转向系统的转向助力值,优选通过仿真方法得出车速传感器2、汽车横摆角速度传感器5、方向盘转角传感器4与汽车转向时侧向力之间的对应数据,再应用响应面法建立车速传感器2、汽车横摆角速度传感器5、方向盘转角传感器4与电磁离合器9输出助力之间的二阶响应面模型。主控子系统通过二阶响应面模型计算得出电磁离合器9的转向助力值,从而调节电磁离合器9的电压,控制电磁离合器9输出的实际转向助力值。
28.(4)主控子系统依据侧向加速度传感器6、车身高度传感器7,确定汽车是否处于临近侧翻危险状态,从而控制电磁离合器9的工作电压,调节电磁离合器9的结合强度,自适应调节电磁离合器9输出给汽车转向系统的电机8产生的转向助力值。
29.汽车侧翻危险状态优先采用如下方法判断:例如:时,存在侧翻危险。r为准静态侧倾系数,,h为汽车质心高度,g为重力加速度,ay为侧向加速度,t为某一时刻。ay由侧向加速度传感器6获得,h由车身高度传感器7获得。为汽车瞬态侧翻阈值,考虑到轮胎的弹性变形和悬架的侧倾,优先选择为0.85。
30.当时,汽车有潜在的侧翻危险,通过改变电磁离合器9的工作电压,调节电磁离合器9的结合强度,改变电磁离合器9输出的转向助力值,维持汽车的操纵稳定性。
31.(5)主控子系统具有自学习功能,可以记忆不同汽车运行状态下,电磁离合器9、电机8的工作电压,用于再次出现相同汽车运行状态时使用。
32.(6)主控子系统具有安全保护功能,当电磁离合器、电机的工作电流超过限定的最大值或转向系统发生故障时,主控子系统自动断开电磁离合器9、电机8的电源,保证电动转向控制系统的安全。
33.该系统的工作方式是:该自适应助力式汽车电动转向控制系统通过车速传感器2、转矩传感器3、方向盘转角传感器4、汽车横摆角速度传感器5、侧向加速度传感器6、车身高度传感器7,获得汽车的运行状态,单片机10以此为基础得出电机8、电磁离合器9的工作电压,以此控制电机8的转向助力值、转向角度、转动方向以及电磁离合器9的结合强度;转向助力经由电机8产生、通过电磁离合器9调节助力值后传递给汽车的转向系统,从而维持汽车的操纵稳定性,提高汽车的运行安全。
34.主控子系统具有自学习功能,可以记忆不同汽车运行状态下,电磁离合器9、电机8的工作电压,用于再次出现相同汽车运行状态时使用。
35.主控子系统具有安全保护功能,当电磁离合器9、电机8的工作电流超过限定的最大值或转向系统发生故障时,主控子系统自动断开电磁离合器9、电机8的电源,保证电动转向控制系统的安全。
36.尽管为说明目的公开了本发明的实施方式和附图,但是本领域的技术人员可以理解;在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施方式和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1