基于三自由度平面并联机械腿的多足步行器
1.本发明属于机器人技术领域,特别涉及一种基于三自由度平面并联机械腿的多足步行器。
背景技术:
2.随着机器人技术的不断发展,移动式机器人已经逐渐的参与到工、农业生产以及服务业中。多足步行器作为移动式机器人的一种,相比于轮式与履带式移动机器人,它具有落足点离散,运动灵活及对地面适应性强等特点,是山地、丘陵、楼梯等非结构地面中理想的移动运载平台,并且多足步行器在行走过程中多采用三角步态,其稳定性和承载能力较好,以至于其在实际工程应用中的执行能力较强。因此,多足步行器的研究有重要的实际意义。
3.机械腿作为多足步行器运动和承载的关键部件,对步行器的性能有重要影响。现有的多足步行器的机械腿主要有串联和并联两种形式,其中串联机械腿的主要特点为工作空间大、运动灵活、控制简单、腿部摆动惯性力较大、刚度较低、自重/负荷比大;并联机械腿的主要特点为结构紧凑、刚度大、自重/负荷比小、工作空间较小,控制较复杂。在并联形式的机械腿中,同时具有较好的承载能力和较大的腿部工作空间的多足步行器并不多见。因此,设计同时具有更大腿部工作空间和更好承载能力的多足步行器,对拓宽移动式步行器应用范围有重要价值。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种腿部工作空间大、承载能力强的基于三自由度平面并联机械腿的多足步行器,多足步行器中的每条机械腿采用三自由度平面并联机构设计,腿部足端件在实现摆动的同时,还能实现平面内两个方向的移动,有利于增大腿部足端件末端的工作空间。
5.本发明采用的技术方案是一种基于三自由度平面并联机械腿的多足步行器,其包括机架、多个机械腿和控制单元,所述控制单元固定设于所述机架的上端面,且所述机架的内部设有电池组,所述多个机械腿通过机架连接件对称设于所述机架的两侧;每个所述机械腿均包括小腿连杆、第一h形连杆、第二h形连杆、第三h形连杆、第一直线驱动器、第二直线驱动器、第四h形连杆、机架连接件和第三直线驱动器,所述小腿连杆包括足端件和足端连杆,所述足端件与所述足端连杆的下端固定连接,且所述小腿连杆的中间部通过第一转动轴与所述第一h形连杆的第一端连接,所述小腿连杆的第一端通过第四转动轴与所述第三h形连杆的第一端转动连接,所述第一h形连杆的中间部通过第二转动轴与所述第二h形连杆的第一端转动连接,且所述第一h形连杆的第二端通过第三转动轴与所述第一直线驱动器的第一端转动连接,所述第一直线驱动器的第二端通过第七转动轴与所述机架连接件的底端转动连接,且所述第二h形连杆的中间部通过第五转动轴与所述第三h形连杆的第二端以及所述第二直线驱动器的第一端转动连接,所述第二直线驱动器的第二端通过第九转
动轴与所述机架连接件的中间部以及所述第四h形连杆的第一端转动连接,且所述第四h形连杆的第二端通过第六转动轴与所述第二h形连杆的第二端转动连接,所述第四h形连杆的中间部通过第八转动轴与所述第三直线驱动器的第一端转动连接,且所述第三直线驱动器的第二端通过第十转动轴与所述机架连接件的顶端连接,所述小腿连杆、第一h形连杆、第二h形连杆以及所述第三h形连杆构成平面四杆机构,通过所述第一直线驱动器、第二直线驱动器以及第三直线驱动器的协调驱动,能实现每个所述机械腿在运动平面内的协调运动,继而能通过所述多个机械腿带动多足步行器进行运动。
6.进一步地,每个所述机械腿中的第一转动轴中心轴线、第二转动轴中心轴线、第三转动轴中心轴线、第四转动轴中心轴线、第五转动轴中心轴线、第六转动轴中心轴线、第七转动轴中心轴线、第八转动轴中心轴线、第九转动轴中心轴线以及第十转动轴中心轴线均相互平行。
7.优选地,所述机架不同侧的多个机械腿中的第七转动轴中心轴线、第九转动轴中心轴线以及第十转动轴中心轴线彼此之间相互平行。
8.进一步地,每个所述机械腿的运动平面为过所述足端件中心与所述第一转动轴中心轴线相垂直的平面,通过所述第一直线驱动器、第二直线驱动器以及所述第三直线驱动器的协调驱动,能实现所述足端件在所述运动平面内的二维移动和一维摆动。
9.优选地,所述机架连接件为底部设置有连接孔的u型件,且所述u型件的两个侧壁均设置有通孔。
10.优选地,所述多个机械腿包括4个、6个或8个机械腿。
11.本发明的特点和有益效果是:
12.1、本发明提供的基于三自由度平面并联机械腿的多足步行器,将多个机械腿对称布置于机架两侧,多足步行器具有较大的腿部工作空间和良好承载能力,对拓宽移动式步行器应用范围有显著意义。
13.2、本发明提供的基于三自由度平面并联机械腿的多足步行器,多足步行器中的每条机械腿采用三自由度平面并联机构设计,运动特征明确,腿部足端件在实现摆动的同时,还能实现平面内两个方向的移动,大大增大腿部足端件末端的工作空间。
14.3、本发明提供的基于三自由度平面并联机械腿的多足步行器,每条机械腿的三个直线驱动器均安装在机架连接件上,使得步行器的腿部结构易于防护,且使机械腿的足端惯性小,运动平稳,机械腿由直线驱动进行驱动,承载能力好。
15.4、本发明提供的基于三自由度平面并联机械腿的多足步行器,每条机械腿的结构紧凑,整体工艺性好且易于安装,使用时非常方便,并且十分适合应用于狭小空间内部,且控制简单方便,准确度高。
附图说明
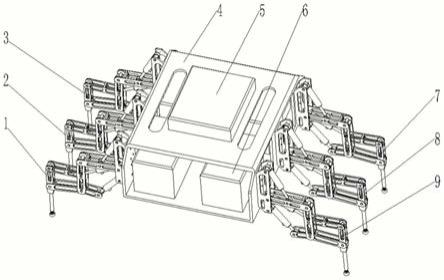
16.图1是本发明实施例六足步行器的整体结构示意图;
17.图2是本发明三自由度平面并联机械腿的结构示意图;
18.图3是本发明三自由度平面并联机械腿的剖视图;
19.图4是本发明三自由度平面并联机械腿的第一姿态示意图;
20.图5是本发明三自由度平面并联机械腿的第二姿态示意图;
21.图6是本发明三自由度平面并联机械腿的第三姿态示意图。
22.主要附图标记:
23.1-第一机械腿;2-第二机械腿;3-第三机械腿;4-机架;5-控制单元;6-电池组;7-第四机械腿;8-第五机械腿;9-第六机械腿;91-小腿连杆;92-第一h形连杆;93-第二h形连杆;94-第三h形连杆;95-第一直线驱动器;96-第二直线驱动器;97-第四h形连杆;98-机架连接件;99-第三直线驱动器;911-足端件;912-足端连杆;r01-第一转动轴;r02-第二转动轴;r03-第三转动轴;r04-第四转动轴;r05-第五转动轴;r06-第六转动轴;r07-第七转动轴;r08-第八转动轴;r09-第九转动轴;r10-第十转动轴。
具体实施方式
24.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
25.在本实施例中,三自由度平面并联机械腿的数量为6个,步行器为六足步行器,如图1所示,其包括机架4、6个机械腿和控制单元5,控制单元5固定设于机架4的上端面,且机架4的内部设有电池组6,多个机械腿通过机架连接件98对称设于机架4的两侧。
26.优选地,机架4为方形的空心结构,电池组6固定安装在空心结构内部的空腔中,电池组6与控制单元5电连接。
27.如图1~图3所示,6个机械腿包括第一机械腿1、第二机械腿2、第三机械腿3、第四机械腿7、第五机械腿8和第六机械腿9,且每个机械腿均包括小腿连杆91、第一h形连杆92、第二h形连杆93、第三h形连杆94、第一直线驱动器95、第二直线驱动器96、第四h形连杆97、机架连接件98和第三直线驱动器99,小腿连杆91包括足端件911和足端连杆912,足端件911与足端连杆912的下端固定连接,且小腿连杆91的中间部通过第一转动轴r01与第一h形连杆92的第一端连接,小腿连杆91的第一端通过第四转动轴r04与第三h形连杆94的第一端转动连接,第一h形连杆92的中间部通过第二转动轴r02与第二h形连杆93的第一端转动连接,且第一h形连杆92的第二端通过第三转动轴r03与第一直线驱动器95的第一端转动连接,第一直线驱动器95的第二端通过第七转动轴r07与机架连接件98的底端转动连接,且第二h形连杆93的中间部通过第五转动轴r05与第三h形连杆94的第二端以及第二直线驱动器96的第一端转动连接,第二直线驱动器96的第二端通过第九转动轴r09与机架连接件98的中间部以及第四h形连杆97的第一端转动连接,且第四h形连杆97的第二端通过第六转动轴r06与第二h形连杆93的第二端转动连接,第四h形连杆97的中间部通过第八转动轴r08与第三直线驱动器99的第一端转动连接,且第三直线驱动器99的第二端通过第十转动轴r10与机架连接件98的顶端连接,小腿连杆91、第一h形连杆92、第二h形连杆93以及第三h形连杆94构成平面四杆机构,通过第一直线驱动器95、第二直线驱动器96以及第三直线驱动器99的协调驱动,能实现每个机械腿在运动平面内的协调运动,继而能通过多个机械腿带动多足步行器进行运动。
28.在一种优选方式中,机架4的两侧还可以对称设置有4个或8个机械腿。
29.优选地,第一机械腿1、第二机械腿2、第三机械腿3、第四机械腿7、第五机械腿8和第六机械腿9中的第一转动轴r01中心轴线、第二转动轴r02中心轴线、第三转动轴r03中心轴线、第四转动轴r04中心轴线、第五转动轴r05中心轴线、第六转动轴r06中心轴线、第七转
动轴r07中心轴线、第八转动轴r08中心轴线、第九转动轴r09中心轴线以及第十转动轴r10中心轴线均相互平行。
30.优选地,机架4不同侧的第一机械腿1分别与第四机械腿7、第五机械腿8和第六机械腿9中的第七转动轴r07中心轴线、第九转动轴r09中心轴线以及第十转动轴r10中心轴线彼此之间相互平行。
31.优选地,每个机械腿的运动平面为过足端件911中心与第一转动轴r1中心轴线相垂直的平面,通过第一直线驱动器95、第二直线驱动器96以及第三直线驱动器99的协调驱动,能实现足端件911在运动平面内的二维移动和一维摆动。
32.优选地,机架连接件98为底部设置有连接孔的u型件,且u型件的两个侧壁均设置有通孔。
33.在具体工作过程中,第三直线驱动器99能够带动第四h形连杆97绕第九转动轴r09转动,第四h形连杆97继续带动第二h形连杆93绕第六转动轴r06转动,第二直线驱动器96通过带动第三h形连杆94运动使小腿连杆91绕第一转动轴r01转动,第一直线驱动器95通过带动第一h形连杆92运动使小腿连杆91绕第四转动轴r04转动。定义机械腿的运动平面为过足端件911中心与第一转动轴r01的轴线垂直的平面。通过第一直线驱动器95、第二直线驱动器96和第三直线驱动器99的协调驱动实现足端件911在运动平面内的二维移动和一维摆动。并且,第一直线驱动器95、第二直线驱动器96和第三直线驱动器99与控制单元5通讯连接并受控于控制单元5。在具体应用过程中,第一直线驱动器95、第二直线驱动器96和第三直线驱动器99根据控制单元5的指令进行动作,从而带动实现足端件911的运动,完成步行器的运动指令。
34.如图4所示,为直线驱动器驱动机械腿在运动平面内沿x轴方向运动的多动驱动方案中的一种,即当机械腿在运动平面内沿x轴负方向平移时,第一直线驱动器95、第二直线驱动器96以及第三直线驱动器99协调驱动且均处于收缩状态,当机械腿在运动平面内沿x轴正方向平移时,第一直线驱动器95、第二直线驱动器96以及第三直线驱动器99协调驱动且均处于伸长状态。
35.如图5所示,为直线驱动器驱动机械腿在运动平面内沿y轴方向运动的多动驱动方案中的一种,即当机械腿在运动平面内沿y轴正方向平移时,第一直线驱动器95、第二直线驱动器96以及第三直线驱动器99协调驱动且均处于收缩状态,当机械腿在运动平面内沿y轴负方向平移时,第一直线驱动器95、第二直线驱动器96以及第三直线驱动器99协调驱动且均处于伸长状态。
36.如图6所示,为直线驱动器驱动机械腿在运动平面内摆动的多动驱动方案中的一种,即当机械腿在运动平面内沿逆时针方向摆动时,第二直线驱动器96以及第三直线驱动器99处于收缩状态,第一直线驱动器95处于伸长状态;当机械腿在运动平面内沿顺时针方向摆动时,第二直线驱动器96以及第三直线驱动器99处于伸长状态,第一直线驱动器95处于收缩状态。
37.本发明实施例中的六足步行器可采用多种步态控制例如三角步态,即第一机械腿1、第三机械腿3和第五机械腿8为一组,第二机械腿2、第四机械腿7和第六机械腿9为一组,两组机械腿交替抬腿运动,实现六足步行器的行进运动,六条机械腿的结构相同,可降低设计制造成本,安装简便,提高通用性。
38.另一方面,本发明采用并联构型的三自由度平面并联机械腿,结构紧凑,使步行器的整体结构更加紧凑。机械腿的三个直线驱动器皆连接到机架连接件上,使得步行器腿部结构易于防护;且使机械腿的足端惯性小,运动平稳;机械腿采用三个直线驱动器,能够大大提高步行器的承载能力。具有更大腿部工作空间和更好承载能力的步行器对拓宽移动式步行器应用范围有重要价值。
39.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1