转向系统的制作方法
1.本发明涉及搭载于车辆的线控转向型的转向系统。
背景技术:
2.在线控转向型的转向系统中,一般不依赖于驾驶员对方向盘等操作构件施加的操作力,而通过转舵装置所具有的电动马达(以下有时称为“转舵马达”)所产生的转舵力来对车轮进行转舵。理想的是,不对转舵马达赋予过大的负荷,例如,在下述专利文献中记载的转向系统中,在转舵装置的温度成为规定温度以上时,限制向转舵马达的供给电流。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2004-322715号公报
6.然而,鉴于向转舵马达的负荷,理想的是,不是在转舵装置的温度上升至规定温度以后,而是从达到规定温度之前起限制向转舵马达的供给电流。另一方面,如果始终限制,则无法充分地发挥该转向系统的能力,此外,关于车辆的行为,也可能给驾驶员带来不适感。就是说,针对线控转向型的转向系统中的向转舵马达的供给电流的限制,还存在很多改良的余地,能通过实施某些改良来提高线控转向型的转向系统的实用性。本发明是鉴于这样的实际情况而完成的,其课题在于,提供一种实用性高的线控转向型的转向系统。
技术实现要素:
7.为了解决上述问题,本发明的转向系统是一种线控转向型的转向系统,搭载于车辆,所述转向系统具备:操作构件,由驾驶员操作;转舵装置,具有电动马达,通过该电动马达所发挥的力对车轮进行转舵;以及控制器,对该转舵装置进行控制,所述控制器被配置为:对向所述电动马达的供给电流设置限制地来实现与所述操作构件的操作相应的车轮的转舵,并且在该车辆的行驶速度小于设定速度且车轮的转舵动作是转舵量减少的方向的动作的情况下,与该车辆的行驶速度为设定速度以上的情况和车轮的转舵动作是转舵量增加的方向的动作的情况相比,减小供给至所述电动马达的电流的限制。
8.[发明的效果]
[0009]
根据本发明的转向系统,在车辆的行驶速度(以下有时称为“车速”)低的状态下进行转舵量减少的方向的动作即所谓的回轮动作时,供给至电动马达(转舵马达)的电流(以下有时称为“转舵电流”)的限制被减小,因此,能减轻电动马达的负担,并且充分地发挥该转向系统的能力。
[0010]
[发明的方案]
[0011]
就本发明中的“设定速度”而言,理想的是被设定为相当低的速度,以达到被认为进行被称为所谓的静态转向(stationary steering)的转舵动作的程度。具体而言,例如理想的是设定为0.5km/h以上且5km/h以下。在成为小于如此设定的设定速度的车速时,为了克服路面与轮胎之间的摩擦力,理想的是使电动马达发挥某种程度上较大的力,因此,理想
的是,使向电动马达的供给电流的限制较小。反之,在设定速度以上的车速时,不太需要使电动马达发挥很大的力,因此,理想的是,与小于设定速度时相比,增大向转舵马达的供给电流的限制,即使增大限制,也能进行顺畅的转舵动作。
[0012]
此外,“转舵量”例如是指可以认为是从中立位置起的车轮的转舵角。对于车轮的转舵动作而言,“转舵量减少的方向的动作”可以称为所谓的“回轮动作”,反之,“转舵量增加的方向的动作”可以称为所谓的“打轮动作”。例如,在所谓的静态转向的状态下,从打轮动作切换至回轮动作的情况下,在回轮动作的开始时,由于有轮胎的变形要恢复的力的作用,因此可以认为不会对电动马达施加极大的负荷。与之相对,在车辆正在以某种程度的速度行驶的状态下进行打轮动作,在恰好车速小于设定车速的状态下切换至回轮动作的情况下,上述轮胎的变形要恢复的力几乎不作用,因此若不对电动马达供给较大的电流,则无法进行充分的回轮动作。若无法进行充分的回轮动作,则与无法进行充分的打轮动作的情况不同,给驾驶员带来的不适感会相当大。考虑到这一点,在静态转向状态下的回轮动作时,理想的是,使向电动马达的供给电流的限制相当小。
[0013]
作为与“供给至电动马达的电流的限制”相关的方案,例如可以通过减小最大容许电流来进行限制,此外,例如,也可以通过从没有限制的情况下的供给电流中减去设定比例的供给电流来进行限制,通过增大该比例来增大限制。
[0014]
需要说明的是,本发明中的“减小供给至电动马达的电流的限制”是指也包括完全不限制的状态的概念。本发明的转向系统可以将供给至电动马达的电流的限制的程度切换为三个阶段以上。例如可以是,在车速小于设定速度且为回轮动作的情况下,使供给至电动马达的电流的限制最小(不限制),在车速小于设定速度且不为回轮动作的情况下,将限制增大某种程度,在车速为设定速度以上时,无论是否是打轮动作,都进一步增大限制。
[0015]
在车速小于设定速度且车轮的转舵动作是转舵量减少的方向的动作的情况下的限制可以在转舵动作的整个区域进行,但例如也可以仅在车轮的转舵量为相对于最大转舵量(成为所谓的转舵端位(steering end)的情况下的转舵量)的设定比例以上时进行限定。具体而言,例如可以在转舵量成为将转舵端位设为100%的情况下的40~60%以上时减小向电动马达的供给电流的限制。
[0016]
在车速小于设定速度且车轮的转舵动作是转舵量减少的方向的动作的状态在某种程度上长时间持续的情况下,可能会发生某种异常。如果考虑到这一点,例如,在该状态下,理想的是,在电动马达的供给电流在设定时间以上是设定电流以上时,使该供给电流减少。此外,在该状态下,理想的是,在向电动马达的供给电流的累计值为阈累计值以上时、在电动马达的温度变高时使转舵马达的供给电流减少。具体而言,例如,理想的是,在该控制器的温度(例如驱动器的基板的温度)为阈温度以上时,使电动马达的供给电流减少。
[0017]
在本发明的转向系统中,根据车速是高于设定速度还是低于设定速度来变更供给至电动马达的电流的限制的程度。因此,在车速成为设定速度附近的状态下,可能会产生限制的程度的变化的频度变高的现象,即控制中的振荡现象。如果鉴于这一点,则理想的是关于设定速度使该车辆的行驶速度正在上升时的值与正在下降时的值不同。具体而言,例如,理想的是,设定为该车辆的行驶速度正在上升时的值比正在下降时的值高。
[0018]
此外,在供给至电动马达的电流的限制的程度被变更时,在该变更急剧的情况下,可能该供给电流会突变,就是说,转舵力可能会突变。为了避免这样的突变,理想的是,在变
更供给至电动马达的电流的限制的程度时,就是说在切换时,使该程度连续地变化。
附图说明
[0019]
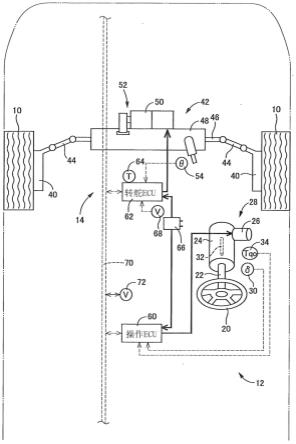
图1是示意性地表示实施例的转向系统的整体构成的图。
[0020]
图2是表示转舵量与转舵力(转舵转矩)的关系的曲线图。
[0021]
图3是表示向转舵马达的供给电流的限制比例的表、示意性地表示供给电流的限制的程度被切换时的最大容许电流的变化的曲线图以及示意性地表示伴随车速的变化的限制比例的切换的曲线图。
[0022]
图4是在控制器中执行的转舵控制程序的流程图。
[0023]
图5是构成转舵控制程序的供给电流限制处理子例程的流程图。
[0024]
图6是针对供给电流限制处理的变形例的子例程的一部分的流程图。
[0025]
图7是构成转舵控制程序的供给电流减少处理子例程的流程图。
[0026]
图8是在控制器中执行的反作用力控制程序的流程图。
[0027]
附图标记说明:
[0028]
10:车轮;12:操作装置;14:转舵装置;20:方向盘〔方向盘操作构件〕;26:反作用力马达;28:反作用力赋予机构〔操作反作用力赋予装置〕;30:操作角传感器;34:操作转矩传感器;42:转舵致动器;50:转舵马达;52:杆移动机构;54:转舵角传感器;60:操作电子控制单元(操作ecu)〔操作控制器〕;62:转舵电子控制单元(转舵ecu)〔转舵控制器〕;64:温度传感器;70:can〔通信线路〕;72:车速传感器。
具体实施方式
[0029]
以下,作为本发明的具体实施方式,参照附图对作为本发明的实施例的转向系统详细进行说明。需要说明的是,本发明除了下述实施例之外,以所述〔发明的方案〕的项中记载的方式为代表,能以基于本领域技术人员的知识施加了各种变更、改良后的各种方式来实施。
[0030]
[实施例]
[0031]
[a]转向系统的硬件构成
[0032]
如图1中示意性地示出的那样,搭载于车辆的实施例的转向系统是用于分别对作为转舵轮的左右两个车轮10进行转舵的系统,是具备机械上相互独立的操作装置12和转舵装置14的线控转向型的转向系统。
[0033]
操作装置12被配置为包括:a)作为由驾驶员进行转向操作的方向盘操作构件的方向盘20;b)转向轴22,在顶端装配有该方向盘20;c)转向柱24,将该转向轴22保持为可旋转,并且该转向柱24支承于仪表板加强件(instrument panel reinforcement)(省略图示);以及d)反作用力赋予机构28,将支承于该转向柱24的作为电动马达的反作用力马达26作为动力源,将作为操作反作用力的反作用力转矩tqc经由转向轴22赋予至方向盘20,其中,该操作反作用力是针对转向操作的反作用力。该反作用力赋予机构28是包括减速器等的一般的构造,因此省略对反作用力赋予机构28的具体的构造的说明。需要说明的是,该反作用力赋予机构28作为操作反作用力赋予装置发挥功能。
[0034]
操作装置12具有检测方向盘20的操作角δ来作为方向盘操作量的操作角传感器
30。另外,在将在车辆的直行状态下方向盘20所采用的姿势设为中立姿势的情况下,从该中立姿势起的旋转角为方向盘20的操作角δ。此外,在转向轴22上组装有扭杆32,操作装置12具有用于基于该扭杆32的扭转量来检测作为由驾驶员施加至方向盘20的操作力的操作转矩tqo的操作转矩传感器34。
[0035]
各个车轮10经由转向节40以能转向的方式支承于车身。转舵装置14通过使两个转向节40一起转动来使两个车轮10一体地转舵。转舵装置14具有转舵致动器42作为主要构成要素。转舵致动器42被配置为包括:a)转向杆(一般被称为齿条杆)46,两端经由连杆44分别连结于左右的转向节40;b)外壳48,将该转向杆46支承为能向左右移动,并且该外壳48固定地保持于车身;以及c)杆移动机构52,将作为电动马达的转舵马达50作为驱动源,用于使转向杆46向左右移动。杆移动机构52是以由螺纹设置于转向杆46的滚珠槽和螺母构成的滚珠丝杠机构为主体的机构,是一般的构造的机构,其中,该螺母经由轴承滚珠与该滚珠槽螺合,并且通过转舵马达50进行旋转,因此,省略对杆移动机构52的此处的详细说明。
[0036]
转舵装置14具有用于通过检测从转向杆46的中立位置(在车辆的直行状态下所位于的位置)起的移动量来检测作为车轮10的转舵量的转舵角θ的转舵角传感器54。
[0037]
操作装置12的控制,详细而言,反作用力转矩tqc的控制,即操作装置12的反作用力马达26的控制由作为操作控制器的操作电子控制单元(以下有时称为“操作ecu”)60执行,其中,该操作控制器是该操作装置12的控制器。操作ecu60由具有cpu、rom、ram等的计算机、反作用力马达26的驱动电路(反作用力马达26为三相无刷马达,因此具体而言为变换器)等构成。
[0038]
同样地,转舵装置14的控制,详细而言,转舵角θ的控制,即转舵装置14的转舵马达50的控制由作为转舵控制器的转舵电子控制单元(以下有时称为“转舵ecu”)62执行,其中,该转舵控制器是该转舵装置14的控制器。转舵ecu62由具有cpu、rom、ram等的计算机、转舵马达50的驱动电路(转舵马达50为三相无刷马达,因此,具体而言为变换器)等构成。需要说明的是,转舵ecu62具有用于检测上述驱动电路的温度t(严格来说是驱动电路的基板的温度,因此,以下有时称为“基板温度t”)的温度传感器64。
[0039]
在本车辆中配设有转舵马达50、作为用于向反作用力马达26供给电流的电源的电池66以及检测该电池66的电压v作为电源电压的电压传感器68。该电压传感器68连接于转舵ecu62。
[0040]
在后文将详细进行说明,但操作ecu60、转舵ecu62一边相互收发信息一边执行控制处理。因此,使操作ecu60、转舵ecu62连接于作为通信线路的can(car area network or controllable area network:车域网或可控域网)70。此外,在车辆中设有用于检测作为该车辆的行驶速度的车速v的车速传感器72,该车速传感器72也与can70相连。需要说明的是,也可以使来自制动系统的与车速v相关的信号在can70中流动来代替车速传感器72。
[0041]
[b]转向系统的控制
[0042]
在实施例的转向系统中,与一般的线控转向型的转向系统同样地执行与转向操作相应的车轮的转舵控制(以下有时仅简称为“转舵控制”)和操作反作用力的控制(以下有时仅称为“反作用力控制”)。不过,在本实施例的转向系统中,执行用于限制向转舵马达50的供给电流的供给电流限制处理和用于强制减少向转舵马达50的供给电流的供给电流减少处理。以下,对作为基本的转舵控制的基本转舵控制、反作用力控制、供给电流限制处理、供
给电流减少处理进行说明,之后,对这些控制的流程简单进行说明。
[0043]
(a)基本转舵控制
[0044]
转舵控制是用于实现与作为针对方向盘20的转向操作的方向盘操作相应的车轮10的转舵的控制,通过转舵ecu62来执行。操作ecu60经由操作角传感器30检测方向盘20的操作角δ来作为操作构件的操作量,转舵ecu62基于从操作ecu60经由can70获取到的操作角δ,按照以下算式,通过将该操作角δ乘以转向齿轮传动比γ来决定成为车轮10的转舵角θ的目标的目标转舵角θ
*
。
[0045]
θ
*
=γ
·
δ
[0046]
转舵ecu62经由转舵角传感器54来检测作为实际的转舵量的实际的车轮10的转舵角θ(以下有时称为“实际转舵角θ”),按照以下算式对作为实际转舵角θ相对于目标转舵角θ
*
的偏差的转舵角偏差δθ进行认定。
[0047]
δθ=θ
*
-θ
[0048]
然后,转舵ecu62按照基于转舵角偏差δθ的反馈控制规则,就是说,按照以下算式决定所需转舵转矩tqs来作为将车轮10转舵至目标转舵角θ
*
所需的转舵转矩。另外,下述算式的第一项、第二项、第三项分别为比例项、积分项、微分项,gp、gi、gd分别为比例项增益、积分项增益、微分项增益。
[0049]
tqs=gp
·
δθ+gi
·
∫δθdt+gd
·
(dδθ/dt)
[0050]
转舵ecu62基于决定出的所需转舵转矩tqs,按照以下算式来决定成为转舵电流is的目标的目标转舵电流is
*
,其中,该转舵电流is是供给至转舵马达50的电流。另外,以下的算式的ks是用于基于所需转舵转矩tqs来决定目标转舵电流is
*
的转舵电流决定系数。
[0051]
is
*
=ks
·
tqs
[0052]
然后,转舵ecu62基于决定出的目标转舵电流is
*
,向转舵马达50供给电流。
[0053]
(b)反作用力控制
[0054]
反作用力控制是用于为了使驾驶员感觉到针对转向操作的适当的操作感而将作为操作反作用力的反作用力转矩赋予至方向盘20的控制,通过操作ecu60来执行。在基本反作用力控制中,操作ecu60基于作为两个分量的转舵转矩依据分量tqcs、操作转矩依据减少分量tqco,按照以下算式来决定作为应该赋予至方向盘20的反作用力转矩的所需反作用力转矩tqc。
[0055]
tqc=tqcs-tqco
[0056]
转舵转矩依据分量tqcs是与为了对车轮10进行转舵而实际发挥的转舵转矩tqs相关的分量。如前文说明的那样,实际的转舵转矩tqs与作为实际供给至转舵马达50的电流的实际转舵电流is成比例,因此操作ecu60按照以下算式来决定转舵转矩依据分量tqcs。需要说明的是,实际转舵电流is基于始终通过转舵ecu62检测并经由can70送来的信息来获取。另外,以下算式中的js是用于决定转舵转矩依据分量tqcs的反作用力转矩分量决定系数。
[0057]
tqcs=js
·
is
[0058]
操作转矩依据减少分量tqco可以认为是用于对驾驶员赋予所谓的动力转向的操作感的分量。在动力转向中,一般将与操作转矩tqo相应的辅助转矩赋予至转向轴22。操作ecu60按照以下算式来决定操作转矩依据减少分量tqco,以模拟该辅助转矩。需要说明的是,作为操作转矩tqo,操作ecu60使用基于扭杆32的扭转量通过操作转矩传感器34检测到
的操作转矩tqo。另外,以下算式中的jo是用于决定操作转矩依据减少分量tqco的反作用力转矩分量决定系数,被设定为实现就像操作转矩tqo越大则发挥越大的辅助力这样的操作感。
[0059]
tqco=jo
·
tqo
[0060]
操作ecu60基于如以上那样决定出的所需反作用力转矩tqc,按照以下算式来决定成为反作用力电流ic的目标的目标反作用力电流ic
*
,其中,该反作用力电流ic是供给至反作用力马达26的电流。另外,以下算式的kc是用于基于所需反作用力转矩tqc来决定目标反作用力电流ic
*
的反作用力电流决定系数。
[0061]
ic
*
=kc
·
tqc
[0062]
然后,操作ecu60基于该决定出的目标反作用力电流ic
*
,向反作用力马达26供给电流。
[0063]
(c)供给电流限制处理
[0064]
鉴于使该转向系统的能力充分地发挥,理想的是,容许向转舵马达50供给足够大的转舵电流is。然而,在基于如上述那样决定出的目标转舵电流is
*
向转舵马达50供给转舵电流is的情况下,也要考虑目标转舵电流is
*
过大而对转舵马达50的负担变得过大。因此,在本转向系统中,转舵ecu62在特定的情况下,为了限制转舵电流is而限制目标转舵电流is
*
。
[0065]
如果详细进行说明,则在被称为所谓的静态转向的转舵动作中,路面与轮胎之间的摩擦力影响很大,为了对车辆10进行转舵需要大的转舵力。因此,在车速v成为被设定为转舵动作被视为静态转向的速度的设定车速v0以上的情况下,转舵ecu62对目标转舵电流is
*
限制得比较大,在车速v小于设定车速v0的情况下,为了确保充分的转舵动作,转舵ecu62减小该限制。
[0066]
图2所示的曲线图示出转舵动作中的转舵角θ的变化和转舵所需的力,即所需转舵转矩tqs的变化。为方便起见,对于所需转舵转矩tqs,将用于将车轮10向右方转舵的转矩表示为正值,将用于将车轮10向左方转舵的转矩表示为负值,对于转舵角θ,在车轮10向比中立位置靠右方转舵时表示为正值,在车轮10向比中立位置靠左方转舵时表示为负值。因此,该曲线图中的第一象限成为车轮10向右方转舵以使转舵角θ增大(打轮)的区域,第二象限成为向右方转舵的车轮10的转舵角θ逐渐减小(回轮)的区域,第三象限成为车轮10向左方转舵以使转舵角θ增大的区域,第四象限成为向左方转舵的车轮10的转舵角θ逐渐减小的区域。
[0067]
曲线中的实线示出了静态转向状态,就是说车速v小于设定车速v0的状态下的所需转舵转矩tqs相对于转舵角θ的变化。与之相对,虚线示出了车轮10在某种程度上旋转的状态下,就是说,车速v为设定车速v0以上且将车轮10打轮转舵至右侧的转舵端位,恰好在该转舵端位处车速v小于设定车速v0,之后进行了回轮转舵的情形。
[0068]
从曲线图中的实线可知,在静态转向状态下,即使从打轮转舵动作转移至回轮转舵动作,由于在轮胎的变形残留较大的状态下开始回轮转舵动作,因此在该回轮转舵动作的初期,所需转舵转矩tqs不会变大。与此相对,从虚线可知,若在车速v为设定车速v0以上时进行打轮转舵动作,从车速v小于设定车速v0时起开始回轮转舵,则残留的轮胎的变形较小,因此回轮转舵动作的初期的所需转舵转矩tqs会变大。在后者的情况下,若限制目标转
舵电流is
*
,即若无法得到充分的转舵转矩,则与在打轮转舵中进行限制的情况不同,给驾驶员带来的不适感会相当大。若考虑到这一点,则在静态转向状态下的回轮转舵动作时,使向转舵马达50的供给电流的限制相当小,明确地说,理想的是不限制。
[0069]
鉴于以上内容,在本转向系统中,如果分别将作为限制的程度的限制比例定义为ε(>0),将对转舵马达50最大容许的转舵电流is定义为最大容许电流ismax,将未被限制的情况下的最大容许电流ismax定义为非限制最大容许电流ismax0,则转舵ecu62按照以下算式来决定最大容许电流ismax。
[0070]
ismax=ismax0
·
(1-ε)
[0071]
然后,如果对与情况相应的限制比例ε的设定进行说明,则如图3的(a)的表所示,转舵ecu62在车速v为设定车速v0以上的情况下将限制比例ε设为β(例如15%)。并且,转舵ecu62在车速v小于设定车速v0的情况下,在不是回轮转舵动作时,将限制比例ε设为α(<β,例如10%),在回轮转舵动作时,将限制比例ε设为0,不施加限制。需要说明的是,对于以上的限制,也在图2中示意性地示出。
[0072]
在基于如上述那样决定出的最大容许电流ismax而所决定的目标转舵电流is
*
超过最大容许电流ismax的情况下,目标转舵电流is
*
被设为最大容许电流ismax。
[0073]
需要说明的是,也能仅在转舵范围(左右的转舵端位之间的区域)的一部分进行车速v小于设定车速v0且回轮转舵动作时的限制。具体而言,例如,仅在转舵角θ(也可以是目标转舵角θ
*
)成为阈转舵角θth以上时,将限制比例ε设为0而不施加限制,在转舵角θ小于阈转舵角θth时,将限制比例ε设为α即可。阈转舵角θth任意地设定即可,例如,将成为转舵范围中的从中立位置起的60%左右的转舵角θ设定为阈转舵角θth即可。
[0074]
此外,也可以不是使用限制比例ε来决定最大容许电流ismax,基于该最大容许电流ismax来限制目标转舵电流is
*
,而是按照以下算式,使用限制比例ε直接对目标转舵电流is
*
进行限制。
[0075]
is
*
=is
*
·
(1-ε)
[0076]
在进行以上这样的转舵马达50的供给电流的限制的情况下,逐步切换限制比例ε,由此可能会发生目标转舵电流is
*
也逐步变化。逐步的目标转舵电流is
*
的变化导致转舵力的逐步的变化,有可能会给驾驶员带来不适感。因此,在本转向系统中,为了对限制比例ε的变更应用滤波特性,如图3的(b)的曲线图所示,转舵ecu62在限制比例ε被切换时,使限制比例ε连续地变化,使最大容许电流ismax连续地变化。换言之,使限制比例ε渐变,使最大容许电流ismax渐变。另外,曲线图示出了将限制比例ε从没有限制的状态,即从0变更至β时的最大容许电流ismax的渐变的情形。
[0077]
此外,在进行以上那样的向转舵马达50的供给电流的限制的情况下,根据车速v相对于设定车速v0的高低,限制比例ε在α与β之间或者0与β之间切换。例如,在车速v被维持在设定车速v0附近时,预测会频繁地进行这些切换。就是说,产生控制中的所谓的振荡现象的可能性高。为了防止该振荡现象,在本转向系统中,转舵ecu62使车速v正在增大时的设定车速v0的值与车速v正在减小时的设定车速v0的值不同。就是说,所谓的迟滞特性被应用于对车速v的变化的限制比例ε的变化。具体而言,如图3的(c)的曲线图所示,将车速v正在增大时的设定车速v0设定为第一设定车速v1,将车速v正在减小时的设定车速v0设定为比v1低的第二设定车速v2。另外,曲线图示出了限制比例ε在α与β之间切换的情形。
[0078]
(d)供给电流减少处理
[0079]
在车速v小于设定车速v0且进行了回轮转舵动作的状态(以下有时称为“静态转向回轮转舵状态(steering-angle-decreasing stationary steering state)”)长时间持续的情况下,可能发生了某种异常,转舵电流is变大的可能性高。考虑到这一点,在本转向系统中,在静态转向回轮转舵状态下,转舵ecu62为了减轻转舵马达50的负担,强制地使供给至转舵马达50的电流,即目标转舵电流is
*
减少。
[0080]
如果详细进行说明,则转舵ecu62在静态转向回轮转舵状态下,极限电流islim以上的实际转舵电流is供给了极限时间tlim以上的情况下,使目标转舵电流is
*
减少。此外,转舵ecu62在静态转向回轮转舵状态下,通过温度传感器64检测到的基板温度t成为阈温度tth以上的情况下,使目标转舵电流is
*
减少。而且,转舵ecu62在静态转向回轮转舵状态下,对作为实际转舵电流is的累计值的实际转舵电流累计值sumis进行运算,在该实际转舵电流累计值sumis成为阈累计值sumisth以上的情况下,使目标转舵电流is
*
减少。
[0081]
转舵ecu62在上述目标转舵电流is
*
减少时使目标转舵电流is
*
减少至设定减少值is
*
red。设定减少值is
*
red被设定得比前文说明的限制比例ε为β时的最大容许电流值ismax0
·
(1-β)小。需要说明的是,转舵ecu62为了避免急剧的目标转舵电流is
*
的变化而使目标转舵电流is
*
逐渐减少。
[0082]
(e)控制流程
[0083]
在本转向系统中,包括上述的供给电流限制处理和供给电流减少处理的转舵控制通过转舵ecu62以短时间间距(例如,几msec~几十msec)反复执行在图4中由流程图表示的转舵控制程序来进行。以下,通过对按照该程序的处理进行说明来对本转向系统中的转舵控制的流程简单进行说明。
[0084]
从操作ecu60发送通过操作角传感器30检测到的关于操作角δ的信息,在由转舵ecu62执行的按照转舵控制程序的处理中,首先,在s1中,基于该信息来获取操作角δ。在接下来的s2中,基于该操作角δ和所设定的转向齿轮传动比γ来决定目标转舵角θ
*
。在s3中,经由转舵角传感器54来检测实际转舵角θ,在s4中,基于所决定出的目标转舵角θ
*
和所检测到的实际转舵角θ来认定转舵角偏差δθ。然后,在s5中,按照基于转舵角偏差δθ的反馈控制规则来决定所需转舵转矩tqs,在s6中,基于该所需转舵转矩来决定目标转舵电流is
*
。
[0085]
针对所决定出的目标转舵电流is
*
,分别在s7中执行供给电流限制处理,在s8中执行供给电流减少处理,在s9中,基于经过了这样的处理的目标转舵电流is
*
来向转舵马达50供给电流。检测实际转舵电流is,在s10中发送所检测的实际转舵电流is的信息,按照该转舵控制程序的处理的一次执行结束。
[0086]
s7的供给电流限制处理通过执行在图5中由流程图表示的供给电流限制处理子例程来进行。在按照该子例程的处理中,首先,在s21中获取车速v,在s22中,基于该获取到的车速v来判定该车辆是否为增速中,即车速v是否为增加中。在车辆为增速中的情况下,在s23中,将用于变更限制比例ε的设定车速v0决定为第一设定车速v1,在车辆不为增速中的情况下,在s24中,将设定车速v0决定为设定得比第一设定车速v1低的第二设定车速v2。
[0087]
在接下来的s25中,判定是否是成为静态转向动作的车速v,换言之,判定车速v是否小于设定车速v0。在车速v小于设定车速v0的情况下,在s26中,判定转舵动作是否是回轮动作,即判定目标转舵角θ
*
是否正在减小。在转舵动作是回轮动作的情况下,在s27中,将静
态转向回轮标志(steering-angle-decreasing stationary steering flag)fl设为“1”,在s28中,将限制比例ε设为0。静态转向回轮标志fl是在车速v小于设定车速v0且目标转舵角θ
*
正在减小时被设为“1”,在除此以外时被设为“0”的标志。
[0088]
在s26中判定为转舵动作不是回轮动作的情况下,在s29中,将静态转向回轮标志fl设为“0”,在s30中,将限制比例ε设为大于0的α。此外,在s25中判定为车速v为设定车速v0以上的情况下,在s31中,将静态转向回轮标志fl设为“0”,在s32中,将限制比例ε设为大于α的β。
[0089]
接着,在s33中,判定作为在前一次的该程序的执行中决定出的限制比例ε的前一次限制比例εp与本次决定出的限制比例ε是否为相同。在不相同的情况下,在s34中,判定限制比例ε是增加了还是减少了,在增加了的情况下,在s35中,将用于使限制比例ε渐变的比例渐变值δε设为正值,在减少了的情况下,在s36中,将比例渐变值δε设为负值。然后,在s37中,对前一次限制比例εp加上比例渐变值δε,从而使限制比例ε渐变。之后,在s38中,将本次的限制比例ε设为前一次限制比例εp。在s33中判定为前一次限制比例εp与本次决定出的限制比例ε为相同的情况下,跳过s34~s37的处理。
[0090]
在接下来的s39中,基于限制比例ε,如前文说明的那样决定最大容许电流ismax,在s40中,判定所决定出的目标转舵电流is
*
是否大于该最大容许电流ismax。在目标转舵电流is
*
大于最大容许电流ismax的情况下,在s41中,将目标转舵电流is
*
设为最大容许电流ismax。就是说,限制目标转舵电流is
*
。另一方面,在目标转舵电流is
*
为最大容许电流ismax以下的情况下,跳过s41。如此,使供给电流限制处理结束。
[0091]
需要说明的是,如前文说明的那样,仅在目标转舵角θ
*
成为阈转舵角θth以上时,将限制比例ε设为0而不施加限制,在目标转舵角θ
*
小于阈转舵角θth时,将限制比例ε设为α的情况下,如图6的(a)那样构成供给电流限制处理子例程的一部分即可。具体而言,在s27之后,追加s27’的判定,就是说追加目标转舵角θ
*
是否为阈转舵角θth以上的判定,构成为在目标转舵角θ
*
为阈转舵角θth以上的情况下,在s28中,将限制比例ε设为0,在目标转舵角θ
*
小于阈转舵角θth的情况下,在s30中,将限制比例ε设为α即可。
[0092]
此外,如前文说明的那样,在不是基于最大容许电流ismax来限制目标转舵电流is
*
,而是使用限制比例ε来直接限制目标转舵电流is
*
的情况下,如图6的(b)所示,构成供给电流限制处理子例程的一部分即可。具体而言,构成为进行s39’的处理来代替s39~s41即可。
[0093]
s8的供给电流减少处理通过执行在图7中由流程图表示的供给电流减少处理子例程来进行。在按照该子例程的处理中,首先在s51中判定静态转向回轮标志fl是否被设为“1”。在静态转向回轮标志fl被设为“1”的情况下,在s52中,运算实际转舵电流累计值sumis。
[0094]
在接下来的s53中,判定实际转舵电流is是否为极限电流islim以上。在实际转舵电流is为极限电流islim以上的情况下,在s54中,时间计数器t以与该程序的执行间距相等的增计数值δt进行增计数,在s55中,判定时间计数器t是否到达了极限时间tlim。
[0095]
在时间计数器t未到达极限时间tlim的情况下,在s56中,通过温度传感器64来检测基板温度t,在s57中,判定该基板温度t是否为阈温度tth以上。在基板温度t小于阈温度tth的情况下,在s58中,判定实际转舵电流累计值sumis是否为阈累计值sumisth以上,在实
际转舵电流累计值sumis小于阈累计值sumisth的情况下,使供给电流减少处理结束。
[0096]
在s55中判定为时间计数器t已到达极限时间tlim的情况下,在s57中判定为基板温度t为阈温度tth以上的情况下,在s58中判定为实际转舵电流累计值sumis为阈累计值sumisth以上的情况下,在s59中,为了使目标转舵电流is
*
逐渐减少,从作为减少中的该程序的前一次的执行时的该目标转舵电流is
*
的前一次目标转舵电流is
*
p中减去减少值δis
*
。然后,在s60中,判定目标转舵电流is
*
是否成为设定减少值is
*
red以下。在目标转舵电流is
*
成为设定减少值is
*
red以下的情况下,在s61中,将目标转舵电流is
*
设为设定减少值is
*
red,在目标转舵电流is
*
未成为设定减少值is
*
red以下的情况下,将目标转舵电流is
*
设为保持减少值δis
*
被减去而得到的值。然后,在s62中,将目标转舵电流is
*
设为前一次目标转舵电流is
*
p,并且使供给电流减少处理结束。
[0097]
在s51中判定为静态转向回轮标志fl被设为“0”的情况下,实质上目标转舵电流is
*
未减少,在s63中,将时间计数器t、实际转舵电流累计值sumis重置,并且使供给电流减少处理结束。
[0098]
在本转向系统中,反作用力控制通过操作ecu60以短时间间距(例如,几msec~几十msec)反复执行在图8中由流程图表示的反作用力控制程序来进行。以下,通过对按照该程序的处理进行说明来对本转向系统中的反作用力控制的流程简单进行说明。
[0099]
在按照反作用力控制程序的处理中,首先,在s71中,经由操作角传感器30来检测操作角δ,在s72中,将关于该操作角δ的信息发送至转舵ecu62。
[0100]
在接着的s73中,基于从转舵ecu62送来的信息来获取实际转舵电流is,在s74中,基于该实际转舵电流is来决定转舵转矩依据分量tqcs。在接下来的s75中,经由操作转矩传感器34来检测操作转矩tqo,在s76中,基于该操作转矩tqo来决定操作转矩依据减少分量tqco。然后,在s77中,通过从转舵转矩依据分量tqcs中减去操作转矩依据减少分量tqco来决定所需反作用力转矩tqc。
[0101]
在接下来的s78中,基于所决定出的所需反作用力转矩tqc来决定目标反作用力电流ic
*
,在s79中,基于该目标反作用力电流ic
*
来向反作用力马达26供给电流。如此,按照该反作用力控制程序的处理的一次执行结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1