助力电机控制方法、系统、装置及存储介质与流程
本发明涉及车辆转向系统控制,尤其涉及一种助力电机控制方法、系统、装置及存储介质。
背景技术:
1、车辆转向系统是车辆底盘的重要组成部分,主要包括方向盘、转向柱、转向器和转向轮等,驾驶员通过转向柱把对方向盘的扭矩传递给转向器,从而带动转向器实现车辆转向。在驾驶员通过方向盘控制车辆转向过程中,当方向盘(转向柱)转动到极限位置时,转向器的齿条运动到末端位置并与末端位置碰撞,导致机械部件损坏且碰撞冲击会影响驾驶员的手感,因此需要在齿条达到末端位置时限制转向以对其进行保护。
2、现有的齿条末端保护方式一般是为齿条设置末端保护区域,该末端保护区域为保护起点位置至末端位置的区域,齿条移动至末端保护区域时,通过减小助力电机的助力力矩来增大方向盘转动的阻力,从而减缓或停止齿条朝向末端位置的运动速度,最终减小齿条碰撞力度。但通过在末端保护区域减小助力的方式,只能略微减小齿条碰撞的冲击,无法应对不同工况而有效防止末端碰撞冲击,导致末端保护效果不佳。
技术实现思路
1、本发明提供一种助力电机控制方法、系统、装置及存储介质,以解决传统末端保护方法无法应对不同工况而有效防止末端碰撞冲击,导致末端保护效果不佳的问题。
2、提供一种助力电机控制方法,包括:
3、获取车辆的车速、转向柱转角和转向柱转速,并基于车速、转向柱转角和转向柱转速计算得到目标保护力矩,目标保护力矩随车速变化而变化;
4、在转向器的齿条处于末端保护区域并向末端位置移动时,根据目标保护力矩对助力电机的原始助力力矩进行调整,得到助力电机的期望力矩,并根据期望力矩控制助力电机对转向柱的助力。
5、可选地,基于车速、转向柱转角和转向柱转速计算得到目标保护力矩,包括:
6、根据转向柱转角确定参考转速,参考转速随着齿条向末端位置的移动而减小;
7、确定转向柱转速与参考转速之间的转速差;
8、根据转速差和车速进行阻尼力计算得到阻尼力矩,并根据阻尼力矩确定目标保护力矩。
9、可选地,根据转速差和车速进行阻尼力计算得到阻尼力矩,包括:
10、根据车速确定最大阻尼力矩,并根据转速差确定阻尼系数;
11、将最大阻尼力矩与保护系数的乘积作为阻尼力矩。
12、可选地,根据车速确定最大阻尼力矩,包括:
13、获取最大阻尼力矩数据,最大阻尼力矩数据为预先根据实车试验数据标定得到的不同车速下允许的最大阻尼力矩值;
14、在最大阻尼力矩数据中查找车速对应的最大阻尼力矩值,作为最大阻尼力矩。
15、可选地,根据转速差和车速进行阻尼力计算得到阻尼力矩之前,方法还包括:
16、确定转速差是否大于预设值;
17、若转速差小于或者等于预设值,则确定助力电机的助力模式为基础保护模式,以根据车速和转向柱转角计算得到基础保护力矩,并将基础保护力矩作为目标保护力矩;
18、若转速差大于预设值,则确定助力电机的助力模式为转速阻尼模式,以根据转速差和车速计算得到阻尼力矩,转速阻尼模式下的目标保护扭矩大于基础保护模式下的所述目标保护扭矩。
19、可选地,根据阻尼力矩确定目标保护力矩,包括:
20、获取根据车速和转向柱转角计算得到基础保护力矩;
21、将阻尼力矩和基础保护力之和作为目标保护力矩。
22、可选地,根据车速和转向柱转角计算得到基础保护力矩,包括:
23、根据车速确定最大基础保护力矩,并根据转向柱转角确定保护系数;
24、将最大基础保护力矩和保护系数的乘积作为基础保护力矩。
25、可选地,根据转向柱转角确定保护系数,包括:
26、确定末端保护区域的总长度,保护区域包括保护的起点位置和末端位置;
27、确定转向柱转角所在位置与起点位置之间的最短距离;
28、将最短距离除以保护区域的总长度,得到保护系数。
29、可选地,根据目标保护力矩对助力电机的原始助力力矩进行调整,得到助力电机的期望力矩,并根据期望力矩控制助力电机进行控制,包括:
30、将原始助力力矩减去目标保护力矩得到期望力矩,目标保护力矩的正负符号与转向柱转角的方向对应;
31、根据期望力矩计算得到助力电机的目标电流,将目标电流输入助力电机的电机控制器,以通过电机控制器对助力电机的控制电流进行闭环控制。
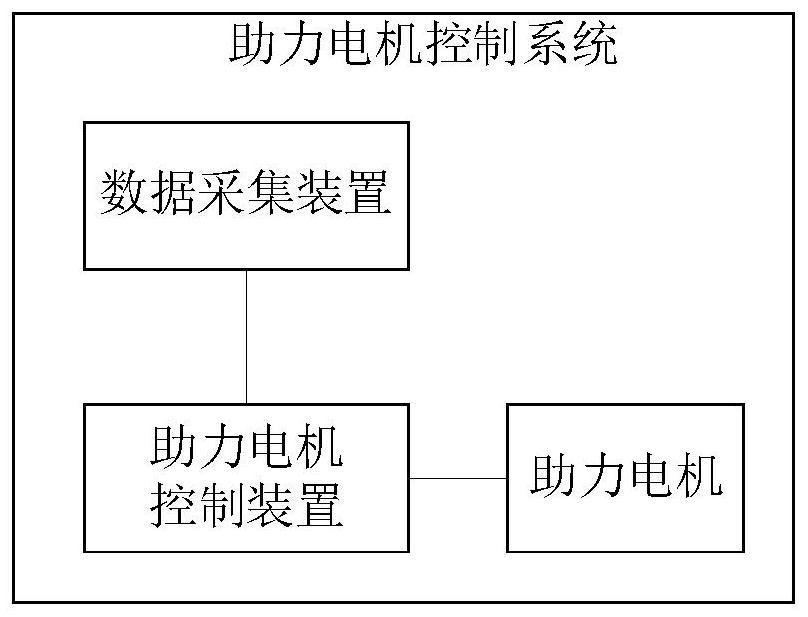
32、提供一种助力电机控制系统,包括助力电机控制装置和助力电机,助力电机控制装置用于:
33、获取车辆的车速、转向柱转角和转向柱转速,并基于车速、转向柱转角和转向柱转速计算得到目标保护力矩,目标保护力矩随车速变化而变化;
34、在转向器的齿条处于末端保护区域并向末端位置移动时,根据目标保护力矩对助力电机的原始助力力矩进行调整,得到助力电机的期望力矩,并根据期望力矩控制助力电机对转向柱的助力。
35、提供一种助力电机控制装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述助力电机控制方法的步骤。
36、提供一种可读存储介质,该可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述助力电机控制方法的步骤。
37、上述助力电机控制方法、系统、装置及存储介质所提供的一个方案中,通过获取车辆的车速、转向柱转角和转向柱转速,并基于车速、转向柱转角和转向柱转速计算得到目标保护力矩,目标保护力矩随车速变化而变化,然后在转向器的齿条处于末端保护区域且向末端位置移动时,根据目标保护力矩对助力电机的原始助力力矩进行调整,得到助力电机的期望力矩,并根据期望力矩控制助力电机对转向柱的助力;本发明在末端保护时不只考虑了转向柱的转角与转速,同时也考虑了车速的影响,通过车速、转向柱转角和转向柱转速计算目标保护力矩,使得目标保护力矩随车速变化而改变,从而调整了助力电机对转向柱的助力,达到基于车速、转向柱转角和转向柱转速限制齿条运动目的,进而缓解了不同车速下的末端碰撞冲击,保证车辆在各个车速工况下均具有较好的齿条末端保护效果。
技术特征:
1.一种助力电机控制方法,其特征在于,包括:
2.如权利要求1所述的助力电机控制方法,其特征在于,所述基于所述车速、转向柱转角和转向柱转速计算得到目标保护力矩,包括:
3.如权利要求2所述的助力电机控制方法,其特征在于,所述根据所述转速差和所述车速进行阻尼力计算得到阻尼力矩,包括:
4.如权利要求3所述的助力电机控制方法,其特征在于,所述根据所述车速确定最大阻尼力矩,包括:
5.如权利要求2所述的助力电机控制方法,其特征在于,所述根据所述转速差和所述车速进行阻尼力计算得到阻尼力矩之前,所述方法还包括:
6.如权利要求5所述的助力电机控制方法,其特征在于,所述根据所述阻尼力矩确定所述目标保护力矩,包括:
7.如权利要求5所述的助力电机控制方法,其特征在于,所述根据所述车速和所述转向柱转角计算得到基础保护力矩,包括:
8.如权利要求7所述的助力电机控制方法,其特征在于,所述根据所述转向柱转角确定保护系数,包括:
9.如权利要求1-8任一项所述的助力电机控制方法,其特征在于,所述根据所述目标保护力矩对助力电机的原始助力力矩进行调整,得到所述助力电机的期望力矩,并根据所述期望力矩控制所述助力电机进行控制,包括:
10.一种助力电机控制系统,其特征在于,包括助力电机控制装置和助力电机,所述助力电机控制装置用于:
11.一种助力电机控制装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至9任一项所述助力电机控制方法的步骤。
12.一种可读存储介质,所述可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至9任一项所述助力电机控制方法的步骤。
技术总结
本发明公开了一种助力电机控制方法、系统、装置及存储介质,方法包括:获取车辆的车速、转向柱转角和转向柱转速,并基于车速、转向柱转角和转向柱转速计算得到目标保护力矩,目标保护力矩随车速变化而变化,然后在转向器的齿条处于末端保护区域且向末端位置移动时,根据目标保护力矩对助力电机的原始助力力矩进行调整,得到助力电机的期望力矩,并根据期望力矩控制助力电机对转向柱的助力;本发明在末端保护时不只考虑了转向柱的转角与转速,同时也考虑了车速的影响,通过车速、转向柱转角和转向柱转速限制齿条运动,缓解了不同车速下的末端碰撞冲击,保证车辆在各个车速工况下均具有较好的齿条末端保护效果。
技术研发人员:李明鑫,李根,赵伟冰,于钦强,刘斯奇
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!