一种基于抗扭桁架的并联四足机器人装置及其控制方法
1.本发明涉及机器人技术领域,特别涉及一种基于抗扭桁架的并联四足机器人装置,还涉及一种并联四足机器人装置的控制方法。
背景技术:
2.四足机器人具有独特的场地适应性,因此一直备受各国团队研究。例如,国内的宇树科技的go系列和国外的波士顿动力机器狗、麻省理工学院的mit,都已较为成熟,这些四足机器人均采用传统的串联腿型,串联腿的受力不够理想。
3.而采用并联腿型的案例则自由度低,灵活性不高,例如,广东省智能制造研究所于2019年5月28日申请的《一种基于同轴并联机构的敏捷四足机器人》,申请号为201920797559,该四足机器人包括躯干、四条并联腿、设置在躯干内的用于驱动并联腿活动的双电机同轴异步传动模块、控制与通讯模块以及电源模块,其中并联腿安装在躯干的两侧并包含大腿和小腿。但是,该四足机器人仍然存在稳定性不高的问题。
技术实现要素:
4.本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明实施例提供一种基于抗扭桁架的并联四足机器人装置,解决多自由度并联型机器人在起伏路段机体稳定性不高的问题。
5.本发明实施例还提供一种并联四足机器人装置的控制方法。
6.根据本发明第一方面的实施例,提供一种基于抗扭桁架的并联四足机器人装置,包括机体部分,所述机体部分包括框架组件,所述框架组件包括底盘板、前后固定设置在所述底盘板上的两个基板结构以及将两个所述基板结构进行连接的桁架结构,所述桁架结构包括横纵相互连接的多根桁架管,相连接的各所述桁架管之间通过转接件相互间隙配合连接,所述基板结构设置有多个导向轴支座,与所述基板结构连接的所述桁架管通过过盈装配于所述导向轴支座中进行固定;以及与所述机体部分连接的四条腿部,所述腿部包括与所述机体部分连接的腿部支架以及安装在腿部支架的并联连杆机构,所述基板结构安装有用于驱动腿部支架转动的yaw轴上侧电机,所述腿部支架安装有驱动所述并联连杆机构动作的pitch轴下侧电机,所述yaw轴上侧电机与所述pitch轴下侧电机不在同一平面上,所述并联连杆机构包括由所述pitch轴下侧电机驱动的两根大腿双层一阶连杆、与其中一根所述大腿双层一阶连杆铰接的着地小腿双层二阶连杆以及与另一根所述大腿双层一阶连杆铰接的非着地小腿双层二阶连杆,所述非着地小腿双层二阶连杆和着地小腿双层二阶连杆铰接。
7.上述基于抗扭桁架的并联四足机器人装置,至少具有以下有益效果:采用桁架结构作为框架组件的连接桥梁,用于驱动腿部支架转动的yaw轴上侧电机安装在基板结构上,当腿部动作时,腿部会对yaw轴上侧电机传递反扭矩,使基板结构受扭矩,进而传递于机体部分的内部,而桁架结构则可直接抵消这一扭矩,能保持机体部分运动的稳定和平衡,能提
高在起伏路段机体的稳定性;另外,yaw轴上侧电机与pitch轴下侧电机不在同一平面上,直接增大腿部的运动空间;腿部的并联连杆机构中,大腿双层一阶连杆、非着地小腿双层二阶连杆以及着地小腿双层二阶连杆均采用双层镂空杆件结构,能保证腿部的稳定性和提高腿部运动的平稳性,使运动响应更迅速,保证运动动作的快速性。
8.根据本发明第一方面的实施例,所述基板结构包括左右设置的两个yaw轴固定板以及将两个所述yaw轴固定板进行连接的连接板,所述yaw轴固定板和所述连接板分别通过垂直板连接件与所述底盘板固定,所述yaw轴上侧电机安装在所述yaw轴固定板上。
9.根据本发明第一方面的实施例,所述腿部支架包括传动板以及连接在所述传动板两侧的两个侧支架板,所述传动板与所述yaw轴上侧电机的输出轴连接,所述pitch轴下侧电机安装在所述侧支架板上。
10.根据本发明第一方面的实施例,所述大腿双层一阶连杆包括两个大腿一阶板,所述大腿双层一阶连杆与所述pitch轴下侧电机连接的一端,两个所述大腿一阶板之间放置第一铝柱并通过第一紧固螺钉紧固于所述pitch轴下侧电机。
11.根据本发明第一方面的实施例,所述大腿双层一阶连杆与所述非着地小腿双层二阶连杆之间、所述大腿双层一阶连杆与所述着地小腿双层二阶连杆之间、所述着地小腿双层二阶连杆与所述非着地小腿双层二阶连杆之间通过铰接组件实现铰接,所述铰接组件包括相互配合的第一塞打螺钉和第一螺母,所述大腿双层一阶连杆、所述非着地小腿双层二阶连杆以及所述着地小腿双层二阶连杆均设置有供所述第一塞打螺钉穿过的轴承件。
12.根据本发明第一方面的实施例,所述大腿双层一阶连杆、所述非着地小腿双层二阶连杆以及所述着地小腿双层二阶连杆均采用碳纤维的双层镂空杆件结构。
13.根据本发明第一方面的实施例,所述着地小腿双层二阶连杆端部设置有橡胶材料的足端。
14.根据本发明第一方面的实施例,所述机体部分还包括控制系统,所述控制系统包括设置在所述底盘板上的陀螺仪;设置在所述底盘板上的微型电脑,所述微型电脑与所述陀螺仪电连接,以接收所述陀螺仪的输入信号;设置在所述底盘板上的若干个单片机,所述微型电脑与所述单片机电连接,以将控制信号通过串口通信方式发送给所述单片机进行打包处理,所述单片机与各所述yaw轴上侧电机电连接,以将控制信号通过can通信方式传输给各所述yaw轴上侧电机,所述单片机与各所述pitch轴下侧电机电连接,以将控制信号通过can通信方式传输给各所述pitch轴下侧电机。
15.根据本发明第一方面的实施例,所述机体部分还包括电源组件,所述电源组件包括电池以及与所述电池电连接的多个分电板,所述分电板用于为所述yaw轴上侧电机、所述pitch轴下侧电机以及控制系统供电。
16.根据本发明第二方面的实施例,提供一种多自由度并联四足机器人装置的控制方法,用于控制根据本发明第一方面实施例所述的基于抗扭桁架的并联四足机器人装置,包括以下步骤:
17.微型电脑通过串口通信方式读取陀螺仪的读取信号;
18.微型电脑通过串口通信方式给单片机发送控制信号;
19.单片机接收微型电脑的控制信号并进行打包,再通过can通信方式将控制信号传输给各yaw轴上侧电机及各pitch轴下侧电机;
20.各yaw轴上侧电机及各pitch轴下侧电机自带的控制板接收到控制信号后,以力矩模式或位置模式转动,微型电脑形成瞬时步态控制指令,并通过串口通信同步发送到单片机上,以控制多自由度并联四足机器人装置的机动动作。
21.上述多自由度并联四足机器人装置的控制方法,至少具有以下有益效果:在行走走动的时候,yaw轴上侧电机控制大腿双层一阶连杆的转动角度α1,pitch轴下侧电机控制非着地小腿双层二阶连杆转动角度α2,其中以电机顺时针转动方向为正,向逆时针转动方向为负,通过控制α1与α2的角度值,以及腿部各部件相应的几何关系,即可通过正运动学解精准确定着地小腿双层二阶连杆着地的足端的位置,通过控制yaw轴上侧电机、pitch轴下侧电机的转角即可控制腿部迈步的步距、步高,通过四条腿部的步态运动的交替控制即可自由度并联四足机器人装置的行走运动。在经过起伏路段的同时,各yaw轴上侧电机及各pitch轴下侧电机会输出相应的指令保持运动的姿态动作,从而保证腿部运动的稳定性。
附图说明
22.下面结合附图和实施例对本发明进一步地说明;
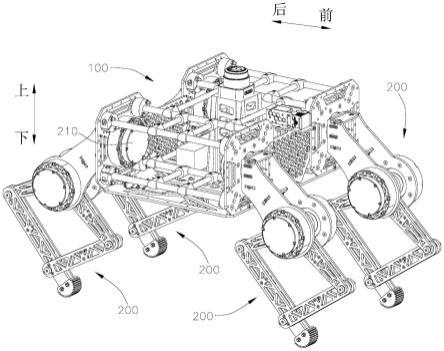
23.图1是本发明实施例的透视图;
24.图2是本发明实施例的俯视图;
25.图3是本发明实施例的正视图;
26.图4是本发明实施例中机体部分的透视图;
27.图5是本发明实施例中机体部分的正视图;
28.图6是本发明实施例中框架组件的透视图;
29.图7是本发明实施例中腿部的透视图;
30.图8是本发明实施例中大腿双层一阶连杆与非着地小腿双层二阶连杆的连接爆炸图;
31.图9是本发明实施例中着地小腿双层二阶连杆与非着地小腿双层二阶连杆的连接爆炸图。
具体实施方式
32.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
33.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
34.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
35.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所
属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
36.下面参照图1至图9,出示了一种基于抗扭桁架的并联四足机器人装置,包括机体部分100以及与机体部分100连接的四条腿部200。
37.参照图1至图6,机体部分100包括框架组件110,框架组件110包括底盘板111、前后固定设置在底盘板111上的两个基板结构以及将两个基板结构进行连接的桁架结构,桁架结构包括横纵相互连接的多根桁架管116,相连接的各桁架管116之间通过转接件117相互间隙配合连接,基板结构设置有多个导向轴支座,与基板结构连接的桁架管116通过过盈装配于导向轴支座115中进行固定。本实施例中,桁架结构是由桁架管116堆叠而成,桁架管116由三种不同长度的碳纤维管材构成,与基板结构连接的桁架管116插入导向轴支座115后并通过螺钉螺母进行紧固。
38.参照图7至图9,腿部200包括与机体部分100连接的腿部支架220以及安装在腿部支架220的并联连杆机构,基板结构安装有用于驱动腿部支架220转动的yaw轴上侧电机211,腿部支架220安装有驱动并联连杆机构动作的pitch轴下侧电机231。yaw轴上侧电机211与pitch轴下侧电机231不在同一平面上,直接增大腿部200的运动空间。
39.其中,并联连杆机构包括由pitch轴下侧电机231驱动的两根大腿双层一阶连杆240、与其中一根大腿双层一阶连杆240铰接的着地小腿双层二阶连杆250以及与另一根大腿双层一阶连杆240铰接的非着地小腿双层二阶连杆260,非着地小腿双层二阶连杆260和着地小腿双层二阶连杆250铰接。如图7所示,大腿双层一阶连杆240、非着地小腿双层二阶连杆260以及着地小腿双层二阶连杆250均采用碳纤维的双层镂空杆件结构,能保证腿部的稳定性和提高腿部运动的平稳性,使运动响应更迅速,保证运动动作的快速性。
40.具体的,基板结构包括左右设置的两个yaw轴固定板112以及将两个yaw轴固定板112进行连接的连接板113,yaw轴固定板112和连接板113分别通过垂直板连接件114与底盘板111固定,yaw轴上侧电机211安装在yaw轴固定板112上。
41.可以理解的是,采用桁架结构作为框架组件110的连接桥梁,用于驱动腿部支架220转动的yaw轴上侧电机211安装在基板结构的yaw轴固定板112,当腿部200动作时,腿部200会对yaw轴上侧电机211传递反扭矩,使yaw轴固定板112受扭矩,进而传递于机体部分100的内部,而桁架结构则可直接抵消这一扭矩,能保持机体部分100运动的稳定和平衡,能提高在起伏路段机体的稳定性。
42.参照图7,腿部支架220包括传动板221以及连接在传动板221两侧的两个侧支架板222,传动板221与yaw轴上侧电机211的输出轴连接,具体的是,yaw轴上侧电机211通过螺钉与传动板221相连,传动板221两侧均连接有垂直板接件223连接,垂直板接件223进一步与侧支架板222通过螺钉相连接,两个侧支架板222之间还通多个支撑板224进行榫接加固。pitch轴下侧电机231安装在侧支架板222上。
43.参照图8,大腿双层一阶连杆240包括两个大腿一阶板241,大腿双层一阶连杆240与pitch轴下侧电机231连接的一端,两个大腿一阶板241之间放置第一铝柱282并通过第一紧固螺钉281紧固于pitch轴下侧电机231。
44.参照图8和图9,着地小腿双层二阶连杆250包括两个着地小腿二阶板251,非着地小腿双层二阶连杆260包括两个非着地小腿二阶板261。优选的,大腿双层一阶连杆240的中
部位置,两个大腿一阶板241之间设置有若干个第二螺母284,并通过第二紧固螺钉283将两个大腿一阶板241进行紧固,其中,第二螺母284为双头螺母。与之相同,两个着地小腿二阶板251之间同样设置有第二螺母284以及与之配合的第二紧固螺钉283,非着地小腿二阶板261同样设置有第二螺母284以及与之配合的第二紧固螺钉283。
45.另外,大腿双层一阶连杆240与非着地小腿双层二阶连杆260之间、大腿双层一阶连杆240与着地小腿双层二阶连杆250之间、着地小腿双层二阶连杆250与非着地小腿双层二阶连杆260之间通过铰接组件270实现铰接,铰接组件270包括相互配合的第一塞打螺钉271和第一螺母275,大腿双层一阶连杆240、非着地小腿双层二阶连杆260以及着地小腿双层二阶连杆250均设置有供第一塞打螺钉271穿过的轴承件。轴承件为法兰轴承274或深沟球轴承272。以大腿双层一阶连杆240与非着地小腿双层二阶连杆260之间的铰接组件270为例,法兰轴承274、深沟球轴承272均通过过盈配合于大腿一阶板241或非着地小腿二阶板261中,相邻的大腿一阶板241和非着地小腿二阶板261之间放置有铁氟龙垫片273。
46.着地小腿双层二阶连杆250端部设置有橡胶材料的足端252。
47.本实施例中,四条腿部200采用并联腿形成,并采用类对称布置方式,即后方的腿部与前方的腿部并不采用完全相同的布置方式,如图1所示。腿部采用双层的结构,加上合理清晰的镂空,能保证腿部结构的稳定性和提高腿部运动的平稳性,使运动响应更迅速,保证运动动作的快速性。腿部采用更趋于仿生性的腿型,与传统的腿型具有较大的差异,同时使其运动动作保证优美的步态与仿生性。
48.在一些实施例中,机体部分100还包括控制系统,控制系统包括微型电脑121、陀螺仪123以及两个单片机。其中,单片机为stm32单片机。
49.微型电脑121、陀螺仪123以及两个单片机均置在底盘板111上。其中,微型电脑121固定到微型电脑支座打122,微型电脑支座打122固定到底盘板111。陀螺仪118固定在底盘板111指定位置。
50.微型电脑121与陀螺仪123电连接,以接收陀螺仪123的输入信号。
51.微型电脑121与单片机电连接,以将控制信号通过串口通信方式发送给单片机进行打包处理,单片机与各yaw轴上侧电机211电连接,以将控制信号通过can通信方式传输给各yaw轴上侧电机211,单片机与各pitch轴下侧电机231电连接,以将控制信号通过can通信方式传输给各pitch轴下侧电机231。
52.机体部分100还包括电源组件,电源组件包括电池131以及与电池131电连接的多个分电板133,分电板133用于为yaw轴上侧电机211、pitch轴下侧电机231以及控制系统供电。其中,电池131固定到电池底座132,电池底座132固定在底盘板111上。
53.机体部分100还包括摄像组件,摄像组件包括摄像头141,摄像头141由螺钉固定到摄像头座体142,摄像头座体142再由螺钉连接到铝柱143,铝柱143再由螺钉连接到底盘板111上。摄像头141位于机体部分100的前部。
54.机体部分100还包括雷达组件,雷达组件包括激光雷达151通过螺钉连接到塔形支座152,塔形支座152连接到底盘板111。
55.本实施例中,分电板133共设置五块,共设一块主分电板和四块子分电板,微型电脑121位于框架组件110的中前部,电池131位于躯干中后部,主分电板固定在塔形支座152下方中空部,四块子分电板两两对称固定在躯干左右两侧。电池131与主分电板连接,主分
电板再将电能通过四块子分电板为整个装置各部分进行供电。
56.本实施例还出示了一种多自由度并联四足机器人装置的控制方法,用于控制上述基于抗扭桁架的并联四足机器人装置,包括以下步骤:
57.微型电脑121通过串口通信方式读取陀螺仪123的读取信号;
58.微型电脑121通过串口通信方式给单片机发送控制信号;
59.单片机接收微型电脑121的控制信号并进行打包,再通过can通信方式将控制信号传输给各yaw轴上侧电机211及各pitch轴下侧电机231;
60.各yaw轴上侧电机211及各pitch轴下侧电机231自带的控制板接收到控制信号后,以力矩模式或位置模式转动,微型电脑形成瞬时步态控制指令,并通过串口通信同步发送到单片机上,以控制多自由度并联四足机器人装置的机动动作。
61.可以理解的是,在行走走动的时候,yaw轴上侧电机控制大腿双层一阶连杆的转动角度α1,pitch轴下侧电机控制非着地小腿双层二阶连杆转动角度α2,其中以电机顺时针转动方向为正,向逆时针转动方向为负,通过控制α1与α2的角度值,以及腿部各部件相应的几何关系,即可通过正运动学解精准确定着地小腿双层二阶连杆着地的足端的位置,通过控制yaw轴上侧电机、pitch轴下侧电机的转角即可控制腿部迈步的步距、步高,通过四条腿部的步态运动的交替控制即可自由度并联四足机器人装置的行走运动。在经过起伏路段的同时,各yaw轴上侧电机及各pitch轴下侧电机会输出相应的指令保持运动的姿态动作,从而保证腿部运动的稳定性。
62.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1