一种电动助力自行车无传感器力矩助力驱动装置的制作方法
1.本发明属于电动助力自行车技术领域,具体涉及一种电动助力自行车无传感器力矩助力驱动装置。
背景技术:
2.电动助力自行车是一种新型的自行车,利用电能来作为辅助驱动能量的来源辅助骑行,实现人力骑行和电动助力一体化的新型交通工具。在骑行过程中,当遇到上坡或需要休息时,人们希望借助电力助力以减少骑行的疲劳,因此及时感知是否需要助力是电动自行车领域中的研究重点,现有技术中,采用力矩传感器对骑行速度进行监测,并辅以智能控制系统,骑行速度高于某限值,不提供助力,骑行速度低于某限值,则判定为需要助力。力矩助力电动车是根据骑行者给电动车施加力矩大小,自动调节电机输出力矩的助力电动车,当前多采用扭矩传感器,压力传感器等采集的信号作为输入信号。它跟普通电动车的区别是,普通电动车采用转把电位计作为电机输入控制信号,助力电动车是根据人蹬踏板产生的力矩自动判断输出力矩。这种通过采集力矩传感器的信号,再经过控制器计算并输出助力信号,这种助力控制方式存在结构复杂,成本高,力矩传感器采集的模拟信号传输受到稳定性和强度的影响等缺点。
技术实现要素:
3.本发明为了解决现有技术中的不足之处,提供一种结构简单、成本低、稳定、可靠性高的电动助力自行车无传感器力矩助力驱动装置。
4.为解决上述技术问题,本发明采用如下技术方案:一种电动助力自行车无传感器力矩助力驱动装置,包括与自行车中轴同轴设置的圆筒壳、定子盘和转子盘,圆筒壳左侧与中轴转动连接,定子盘固定设在圆筒壳内部左侧,转子盘设在圆筒壳内部右侧,转子盘内圆与中轴外圆之间通过花键结构传动连接,定子盘右侧与转子盘左侧之间具有气隙,中轴与转子盘之间设有气隙大小调节机构。
5.气隙大小调节机构包括碟簧、左圆环和右圆环,中轴外圆设有位于转子盘左侧的定位环,碟簧套在中轴外圆,碟簧左端与定位环右侧压接,碟簧右端与转子盘左侧面压接,左圆环固定设在转子盘右侧面,自行车链盘设在中轴上并位于转子盘右侧,右圆环固定设在链盘左侧面,左圆环和右圆环同轴线且左右对应设置,左圆环右侧面沿圆周方向均匀设有至少三个第一弧形楔块,右圆环左侧面沿圆周方向均匀设有至少三个第二弧形楔块,三个第一弧形楔块与三个第二弧形楔块的楔面左右一一对应且相互压接配合。
6.链盘左侧面沿圆周方向开设有多个弧形限位孔,弧形限位孔、第一弧形楔块和第二弧形楔块的弧长相等,转子盘右侧面沿圆周方向开设有与弧形限位孔数量相同且一一对应的限位销,每根限位销对应伸入到一个弧形限位孔内。
7.转子盘包括左侧敞口的磁轭,磁轭内部设有与定子盘左右对应的永磁体。
8.采用上述技术方案,本发明采用盘式电机的原理并结合自行车的结构作为电动车
的助力动力。盘式电机包括转子盘和定子盘,其磁场方向是和中轴轴线平行的。因此盘式电机也可称为轴向磁场电机。磁场从轴向走,不但磁能密度大,而且交换能量的空间也大,因此电机的转矩密度比径向磁场大幅提高。
9.根据电机原理,扭矩和气隙磁密关系式为:其中te:扭矩;p:极对数;m:相数;:磁链;i
s :绕组电流;β:力矩角。
10.电机设计完成以后极对数、相数、力矩角都已经确定。在控制器给定一定电流的情况下磁链跟力矩成正比例关系。在磁场密度不饱和的前提下,盘式电机的定子盘与转子盘之间气隙和磁链之间是正比例的关系。因此,本发明通过调节气隙的大小来实现助力大小的自动调整。
11.本发明的工作原理为:骑行者双脚分别踩踏左右两侧的踏板,驱动中轴旋转,中轴通过花键结构带动转子盘旋转,链盘左侧的第二弧形楔块和转子盘右侧的第一弧形楔块的楔面产生挤压,挤压力f垂直于楔面,f分解为径向分力f1和轴向分力f2,径向分力f1驱动链盘旋转,在链盘上产生扭矩,链盘通过链条带动后车轮前行,挤压力f增大,径向分力f1和轴向分力f2也增大,从而推动转子盘在中轴上向左移动,气隙x减小,在盘式电机电流不变的情况下,电机扭矩增大,从而起到助力效果。
12.在第二弧形楔块和第一弧形楔块的楔面在相互挤压达到相对转动的同时,限位销在弧形限位孔内移动,当限位销与弧形限位孔的一端压接时,转子盘向左移动到极限,即气隙x达到最小值,电机的助力达到设定的最大值。限位销与弧形限位孔的配合,保证转子盘不能移动到与定子盘接触,从而保证助力的有效性。
13.本发明采用骑行者在对踏板施加外力的大小以使第二弧形楔块和第一弧形楔块的楔面在相互挤压,根据外力的大小来自动调整盘式电机转子盘与定子盘之间的气隙大小,来实现电机助力大小的输出。外力越大,助力越大,从而使得骑行者保持较为稳定的骑行力。
14.综上所述,本发明原理科学,体积小,结构紧凑,方便安装,根据骑行者对踏板施加外力的大小更为直接且精准地转换为盘式电机的气隙大小,从而达到对施加不同骑行外力时,助力大小快速、精确调节,且能够应用于自行车各种应用场合,不受路况影响。
附图说明
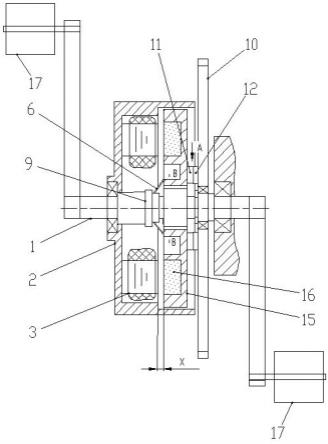
15.图1是本发明的结构示意图;图2是图1中a向示意图;图3是图1中b-b剖视图;图4是图1中链盘的立体结构示意图;图5是图1中转子盘右侧的立体结构示意图。
具体实施方式
16.如图1-图5所示,本发明的一种电动助力自行车无传感器力矩助力驱动装置,包括与自行车中轴1同轴设置的圆筒壳2、定子盘3和转子盘4,圆筒壳2左侧与中轴1转动连接,定子盘3固定设在圆筒壳2内部左侧,转子盘4设在圆筒壳2内部右侧,转子盘4内圆与中轴1外
圆之间通过花键结构5传动连接,定子盘3右侧与转子盘4左侧之间具有气隙x,中轴1与转子盘4之间设有气隙大小调节机构。
17.气隙大小调节机构包括碟簧6、左圆环7和右圆环8,中轴1外圆设有位于转子盘4左侧的定位环9,碟簧6套在中轴1外圆,碟簧6左端与定位环9右侧压接,碟簧6右端与转子盘4左侧面压接,左圆环7固定设在转子盘4右侧面,自行车链盘10设在中轴1上并位于转子盘4右侧,右圆环8固定设在链盘10左侧面,左圆环7和右圆环8同轴线且左右对应设置,左圆环7右侧面沿圆周方向均匀设有至少三个第一弧形楔块11,右圆环8左侧面沿圆周方向均匀设有至少三个第二弧形楔块12,三个第一弧形楔块11与三个第二弧形楔块12的楔面左右一一对应且相互压接配合。
18.链盘10左侧面沿圆周方向开设有多个弧形限位孔13,弧形限位孔13、第一弧形楔块11和第二弧形楔块12的弧长相等,转子盘4右侧面沿圆周方向开设有与弧形限位孔13数量相同且一一对应的限位销14,每根限位销14对应伸入到一个弧形限位孔13内。
19.转子盘4包括左侧敞口的磁轭15,磁轭15内部设有与定子盘3左右对应的永磁体16。
20.本发明采用盘式电机的原理并结合自行车的结构作为电动车的助力动力。盘式电机包括转子盘4和定子盘3,其磁场方向是和中轴1轴线平行的。因此盘式电机也可称为轴向磁场电机。磁场从轴向走,不但磁能密度大,而且交换能量的空间也大,因此电机的转矩密度比径向磁场大幅提高。
21.根据电机原理,扭矩和气隙磁密关系式为:其中te:扭矩;p:极对数;m:相数;:磁链;i
s :绕组电流;β:力矩角。
22.电机设计完成以后极对数、相数、力矩角都已经确定。在控制器给定一定电流的情况下磁链跟力矩成正比例关系。在磁场密度不饱和的前提下,盘式电机的定子盘3与转子盘4之间气隙x和磁链之间是正比例的关系。因此,本发明通过调节气隙的大小来实现助力大小的自动调整。
23.本发明的工作原理为:骑行者双脚分别踩踏左右两侧的踏板17,驱动中轴1旋转,中轴1通过花键结构5带动转子盘4旋转,链盘10左侧的第二弧形楔块12和转子盘4右侧的第一弧形楔块11的楔面产生挤压,挤压力f垂直于楔面,f分解为径向分力f1和轴向分力f2,径向分力f1驱动链盘10旋转,在链盘10上产生扭矩,链盘10通过链条带动后车轮前行,挤压力f增大,径向分力f1和轴向分力f2也增大,从而推动转子盘4在中轴1上向左移动,气隙x减小,在盘式电机电流不变的情况下,电机扭矩增大,从而起到助力效果。
24.在第二弧形楔块12和第一弧形楔块11的楔面在相互挤压达到相对转动的同时,限位销14在弧形限位孔13内移动,当限位销14与弧形限位孔13的一端压接时,转子盘4向左移动到极限,即气隙x达到最小值,电机的助力达到设定的最大值。限位销14与弧形限位孔13的配合,保证转子盘4不能移动到与定子盘3接触,从而保证助力的有效性。
25.本发明采用骑行者在对踏板17施加外力的大小以使第二弧形楔块12和第一弧形楔块11的楔面在相互挤压,根据外力的大小来自动调整盘式电机转子盘4与定子盘3之间的气隙x大小,来实现电机助力大小的输出。外力越大,助力越大,从而使得骑行者保持较为稳定的骑行力。
26.本发明中的转子盘4和定子盘3均为现有成熟技术,具体原理及其构造不再赘述。
27.本实施例并非对本发明的形状、材料、结构等作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1