一种适用于连续高低不平壁面的吸附式移动模组的制作方法
1.本发明涉及机器人清洗领域,具体地说,是一种适用于连续高低不平壁面的吸附式移动模组。
背景技术:
2.电厂水冷壁是并排放置的圆柱形管道,其管道之间为凹陷下去的凹槽,形成高低不平的壁面,爬壁机器人在壁面上行走时会产生幅度较大的震动,且高低不平的臂面,容易导致一端翘起的情况发生,进而可能导致中间的磁吸块脱离壁面情况发生,造成吸附不稳定的风险。
3.综上所述,亟需一种能在连续高低不平壁面上平稳移动的吸附式移动模组。
技术实现要素:
4.本发明的目的是,提供一种能在连续高低不平壁面上平稳移动的吸附式移动模组。
5.为实现上述目的,本发明采取的技术方案是:
6.一种适用于连续高低不平壁面的吸附式移动模组,包括安装支架、吸附模组、移动模组;所述安装支架包括第一连接部、第二连接部,所述第一连接部用于与外界进行连接;所述吸附模组包括吸附支架、磁吸块,所述磁吸块安装于所述吸附支架一端,所述吸附支架另一端与所述第二连接部相连;所述移动模组包括移动支架、移动轮组,所述移动支架其一端与安装支架相连,所述移动轮组与所述移动支架活动连接,其中,所述移动轮组具有大截面。
7.作为一种优选的技术方案,所述安装支架包括底板及安装于底板两侧的侧板,所述底板与侧板上设有若干安装位。
8.作为一种优选的技术方案,所述吸附支架其一端为与所述底板上的安装孔相适配连接,另一端为弧面,对应的,所述磁吸块为弧形吸附块,与所述弧面相适配安装。
9.作为一种优选的技术方案所述移动支架其一端为与所述底板上的安装孔相适配连接,另一端与所述移动轮组通过轴杆活动相连。
10.作为一种优选的技术方案,所述移动轮组为具有一定直径的长圆柱滚轮。
11.作为一种优选的技术方案,所述移动轮组为成阵列布置的移动凸球。
12.作为一种优选的技术方案,所述移动凸球包括安装柱、移动球;所述安装柱其端部设有凹腔,所述凹腔内活动设有所述移动球;所述安装柱另一端与所述移动支架相连。
13.本发明优点在于:
14.1、本发明所述适用于连续高低不平壁面的吸附式移动模组包括安装支架、吸附模组、移动模组,所述移动模组具有大截面,可以越过相应程度的凹陷,避免轮子完全陷入凹陷内起伏震动,从而降低了爬壁机器人整体的震动,使工作状况更加稳定安全
15.2、本发明所述安装支架可以设置不同的安装位,方便模组的多场景模块化组装应
用;
16.3、本发明所述移动模组包括移动支架、移动轮组,所述移动轮组为成阵列布置的移动凸球,所述移动凸球包括安装柱、移动球,所述安装柱其端部设有凹腔,所述凹腔内活动设有所述移动球,其呈阵列设置,在移动中,可以允许一部分移动凸球悬空,从而完成对凹陷的越障工作,所述移动球在所述凹腔内自由转动,减少与管壁间的硬摩擦,方便模组的移动。
17.4、本发明所述适用于连续高低不平壁面的吸附式移动模组在爬壁机器人的应用中,可以解决在电厂水冷壁等起伏面上的稳定行走,有效避免了普通轮组随着起伏进行震动且发出异响的情况发生。
附图说明
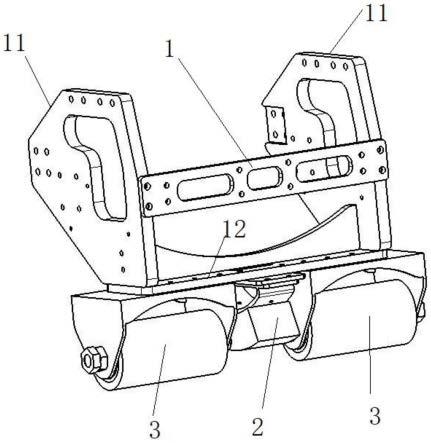
18.附图1是本发明一种适用于连续高低不平壁面的吸附式移动模组示意图。
19.附图2是本发明一种适用于连续高低不平壁面的吸附式移动模组局部示意图。
20.附图3是本发明一种适用于连续高低不平壁面的吸附式移动模组应用示意图。
21.附图4是本发明另一种适用于连续高低不平壁面的吸附式移动模组示意图。
22.附图5是本发明另一种适用于连续高低不平壁面的吸附式移动模组局部示意图。
23.附图6是本发明另一种适用于连续高低不平壁面的吸附式移动模组应用示意图。
具体实施方式
24.下面结合具体实施方式,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明记载的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
25.附图中涉及的附图标记和组成部分如下所示:
26.1.安装支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.吸附模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3.移动模组
27.11.第一连接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12.第二连接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21.吸附支架
28.22.磁吸块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31.移动支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32.移动轮组
29.33.移动凸球
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331.安装柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332.移动球
30.实施例1
31.请参见附图1、附图2;附图1是本发明一种适用于连续高低不平壁面的吸附式移动模组示意图;附图2是本发明一种适用于连续高低不平壁面的吸附式移动模组局部示意图。一种适用于连续高低不平壁面的吸附式移动模组,包括安装支架1、吸附模组2、移动模组 3;所述安装支架1包括第一连接部11、第二连接部12,本实施例中,所述安装支架1包括底板及安装于底板两侧的侧板,所述底板设有所述第二连接部12,所述侧板上设有所述第一连接部11,即所述第一、第二连接部12分别为侧板、底板上的安装位,所述安装位可以为螺栓孔和或通孔,与外界通过螺栓(图中未示出)进行固定连接,还可以以焊接等固定方式进行连接,即所述侧板可以与爬壁机器人相连,使发明所述移动模组3作为爬壁机器人的从动轮;所述底板其上的第二连接部12用于与吸附模组2及移动模组3相连;所述吸附模组2包括吸附支架21、磁吸块22,所述吸附支架21一安装面为平面结构,一安装面为弧面结构,其平
面与所述第二连接部12通过螺栓相连,其弧面与磁吸块22的内弧面相连,所述磁吸块22为弧形吸附块,其外弧面能提供一定的越障能力,所述吸附模组 2安装于所述底板的中间位置,所述移动模组3对称安装于所述吸附模组2两侧;所述移动模组3包括移动支架31、移动轮组32,所述移动支架31其一端为与所述底板上的安装位相适配连接,另一端与所述移动轮组32通过轴杆活动相连,所述移动轮组32为具有一定直径的长圆柱滚轮,应理解的是,在电厂水冷壁的爬行应用时,其半径大于水冷壁管路的直径。
32.请参见附图3,附图3是本发明一种适用于连续高低不平壁面的吸附式移动模组应用示意图。本发明的使用方式:在应用本发明所述适用于连续高低不平壁面的吸附式移动模组的爬壁机器人对电厂水冷壁进行清洗时,所述移动模组3其移动轮组32具有大截面,本实施例中,所述移动轮组32为具有一定直径的长圆柱滚轮,该滚轮的半径大于水冷壁管路的直径,使得移动轮组32在移动时,不会大幅度的完全陷入水冷壁管柱之间的凹陷中。
33.需要说明的是:本发明所述适用于连续高低不平壁面的吸附式移动模组包括安装支架 1、吸附模组2、移动模组3,所述移动模组3具有大截面,可以越过相应程度的凹陷,避免轮子完全陷入凹陷内起伏震动,从而降低了爬壁机器人整体的震动,使工作状况更加稳定安全;所述安装支架1可以设置不同的安装位,方便模组的多场景模块化组装应用;所述吸附模组2包括吸附支架21、磁吸块22,所述磁吸块22为弧形吸附块,其两端的翘起提供了一定的越障能力。本发明所述适用于连续高低不平壁面的吸附式移动模组在爬壁机器人的应用中,可以解决在电厂水冷壁等起伏面上的稳定行走,有效避免了普通轮组随着起伏进行震动且发出异响的情况发生。
34.实施例2
35.请参见附图4、附图5、附图6,附图4是本发明另一种适用于连续高低不平壁面的吸附式移动模组示意图,附图5是本发明另一种适用于连续高低不平壁面的吸附式移动模组局部示意图,附图6是本发明另一种适用于连续高低不平壁面的吸附式移动模组应用示意图。本实施例与实施例1基本相同,其不同之处在于,所述移动模组3其移动轮组32可以为呈阵列布置的若干移动凸球33,所述移动凸球33包括安装柱331、移动球332,所述安装柱331其端部设有凹腔,所述凹腔内活动设有所述移动球332,所述移动球332可以在所述凹腔内自由转动;所述安装柱331另一端与所述移动支架31固定相连;其优点在于:呈阵列设置的移动凸球33,在移动中,可以允许一部分移动凸球33悬空,从而完成对凹陷的越障工作,所述移动球332在所述凹腔内自由转动,减少与管壁间的硬摩擦,方便模组的移动。
36.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1