传动机构组件和转向系统的制作方法
1.本发明涉及一种用于电动马达辅助转向系统的传动机构组件以及一种转向系统。
背景技术:
2.机动车辆中的转向系统通常是电动马达辅助的,以便减小必须由驾驶员施加的转向力。为此目的,例如,设置有具有蜗杆轴和蜗轮的蜗轮传动机构,其中,蜗杆轴由电动马达驱动并且蜗轮联接至转向柱。
3.为了确保可靠的功能,蜗杆轴必须与蜗轮保持稳定的齿接合。然而,所使用部件的高公差使这变得更加困难。甚至通常由塑料制成的蜗杆轴和蜗轮的尺寸也受到高公差的影响,随着时间的推移,这些高公差由于磨损而增加。由于高公差,在安装蜗杆轴时需要一定量的游隙。
4.例如,设置有预加载装置,该预加载装置在轴向方向上向蜗杆轴施加预加载力,以便使蜗杆轴在轴向方向上保持在特定公差范围内,另外,以允许蜗杆轴与蜗轮之间可靠的接合。
5.在每个生产的转向系统中,该预加载力必须处于预定的公差范围内。由于影响参数和涉及的部件数量多,适当地调节预加载力是非常昂贵且复杂的。
技术实现要素:
6.因此,本发明的目的是允许对电动马达转向系统进行可靠且简单的公差补偿。
7.根据本发明,此目的通过用于电动马达辅助转向系统的传动机构组件来实现,该传动机构组件包括电动马达、蜗杆轴,该蜗杆轴可以由电动马达驱动,并且该蜗杆轴与蜗轮接合,其中,蜗杆轴在面向电动马达的端面上具有凹部,在该凹部中布置有弹性元件,该弹性元件在背离电动马达的方向上向蜗杆轴施加轴向力。在轴向方向上,弹性元件的一端支撑在调节元件上,该调节元件的形成方式为使得当蜗杆轴上的轴向力超过限定阈值时,该调节元件允许弹性元件在轴向方向上伸展,并且当蜗杆轴上的轴向力低于限定阈值时,该调节元件限制弹性元件的伸展。
8.根据本发明的传动机构组件的优点是轴向力自动地调节到合适的值,并且轴向力附加地限制于阈值。需要一定的轴向力来补偿公差。因此,首先,确保蜗杆轴与蜗轮之间可靠的接合。如果预加载力过低,特别是如果用于安装蜗杆轴的固定轴承的滚动元件与轴承圈并未接触,则可能产生颤振噪音。然而,与此同时,轴向力不应过大,因为齿轮箱否则会变得僵硬。通过根据本发明的传动机构组件,可以省去对轴向力的复杂调节。
9.因为当超过阈值时,调节元件允许弹性元件在轴向方向上伸展,弹性元件能够松弛,结果是由弹性元件施加的轴向力减小。
10.特别地,弹性元件可以松弛直到建立由弹性元件引起的轴向力与由调节元件引起的反向力之间的力平衡。
11.当蜗杆轴安装在车辆环境中时,在已经通过弹性元件进行公差补偿后,调节元件
限制弹性元件的伸展。因此,弹性元件在公差补偿的范围内的伸展不受调节元件的阻碍而是期望的。这意味着当轴向力低于阈值时,弹性元件也可以在公差补偿的范围内伸展。
12.优选地,凹部、弹性元件和调节元件的设计方式为使得由弹性元件引起的轴向力在传动机构组件的安装期间达到最小值。如果轴向力过低,无法可靠地避免颤振噪音。
13.根据一个实施例,凹部、弹性元件和调节元件的设计方式为使得在安装期间稍微超过限定阈值,并且因此发生调节元件的移位。因此,可以尽可能准确地设定预加载力,同时避免了预加载力过低。
14.蜗杆轴和蜗轮一起形成蜗轮传动机构。
15.弹性元件例如是螺旋弹簧。
16.例如,当由弹性元件引起的轴向力超过250n、特别是280n时,调节元件允许弹性元件伸展。这特别地通过调节元件的支撑方式为使得需要对应的大的力来使调节元件移位而实现的。以此方式,确保了足够大的轴向力,以确保所有涉及的部件的可靠的接合,同时避免了过大的摩擦和轴向支承加载。根据应用,弹性元件的伸展甚至还可以在施加的轴向力小于250n时发生。
17.根据一个实施例,调节元件被压入凹部中,其中,压配合的设计方式为使得如果超过阈值,调节元件可在凹部中移位。如果轴向力低于阈值,调节元件因此被牢固地安置,这意味着作用在调节元件上的力不足以使调节元件在凹部中移位。通过压配合,可以以简单的方式实现调节元件所需的可移位性。
18.例如,调节元件布置在弹性元件与凹部的底部之间。因此,限制了调节元件的移位行程,结果是,进而可以限制轴向力的最大减小。
19.根据另外的实施例,衬套插入到凹部中,其中,调节元件被压到衬套上,其方式为使得当超过阈值时,调节元件可相对于衬套移位。该实施例的优点是可以在蜗杆轴的外部进行压配合。另外,在这种情况下,与凹部的直径公差无关,因为在这种情况下,凹部仅用于引导而不涉及压配合。此外,在调节元件插入到蜗杆轴中的凹部中之前,可以进行加载测试。
20.特别地,衬套可移位地支撑在凹部中。
21.调节元件和/或衬套可以是深拉件。以此方式可以简单地生产调节元件和/或衬套。
22.衬套可以被开缝。特别地,狭缝在衬套中在轴向方向上延伸。因此,衬套在径向方向上是略微柔性的,这意味着衬套可以更容易地在凹部中移位。因此,狭缝确保了凹部与衬套之间的公差补偿。
23.衬套优选地无游隙地容纳在凹部中。因此,确保了衬套的稳定引导。无游隙的安装附加地还用于减小噪音。实际上,防止了衬套在凹部中颤振。
24.蜗杆轴可以通过固定轴承可旋转地安装,并且电动马达的驱动轴可以经由联接装置以传递力矩的方式联接至蜗杆轴,其中,联接装置支撑在固定轴承上并且被由弹性元件引起的轴向力轴向加载在固定轴承上。由于固定轴承的轴向加载,避免了固定轴承的颤振。更确切地说,轴向加载避免了轴承的滚动元件与轴承圈并未接触。同时,可以在轴承中实施一定量的游隙,这允许蜗杆轴的可能的振荡,结果是蜗杆轴的加载较小。由于根据本发明将轴向力限制于阈值,防止了在轴承中的摩擦力变得过大,并因此防止了轴承变得僵硬。
25.替代性地,蜗杆轴上可以存在套环,该套环支撑在固定轴承上并且被由弹性元件引起的轴向力轴向加载在固定轴承上。
26.根据本发明,此目的进一步通过用于机动车辆的转向系统来实现,该转向系统具有根据本发明的传动机构组件。
附图说明
27.可以从以下说明和附图收集另外的优点和特征。在附图中:
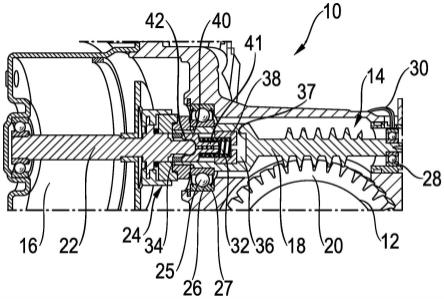
[0028]-图1示出了根据本发明的、具有根据本发明的传动机构组件的转向系统的一部分,
[0029]-图2示出了根据本发明的、具有根据本发明的另外的传动机构组件的另外的转向系统,以及
[0030]-图3示出了根据本发明的、根据又一实施例的传动机构组件的一部分。
具体实施方式
[0031]
图1示出了电动马达辅助转向系统10的一部分。转向系统10包括转向柱12,该转向柱可以由用户通过方向盘(未展示)旋转,以便操纵车辆。
[0032]
为了简化转向操作,传动机构组件14被设置用于转向系统10的电动马达辅助。
[0033]
传动机构组件14包括电动马达16、可以由电动马达16驱动的蜗杆轴18、和蜗轮20,蜗杆轴18与该蜗轮接合,更具体地是齿接合。
[0034]
为了驱动蜗杆轴18,电动马达16的驱动轴22经由联接装置24以传递力矩的方式联接至蜗杆轴18。
[0035]
蜗轮20牢固地联接至转向柱12。
[0036]
因此,当蜗杆轴18由电动马达16驱动时,转向柱12由蜗轮20旋转。
[0037]
蜗杆轴18通过固定轴承26可旋转地安装。固定轴承26是具有滚动元件25和轴承圈27的滚动接触轴承。
[0038]
联接装置24在轴向方向上支撑在固定轴承26上。另外,联接装置24在径向上定位在固定轴承的区域内部并且在轴向上定位在固定轴承的区域中。
[0039]
另外,为了支撑蜗杆轴18,存在松配轴承28,其中,固定轴承26和松配轴承28布置在蜗杆轴18的相反的两个端部区段中。
[0040]
松配轴承28被弹簧30侧向地加载,以将松配轴承28保持在图1所示的位置。
[0041]
通过弹簧30,确保了蜗杆轴18与蜗轮20之间的可靠的接合。
[0042]
此外,存在弹性元件32,在示例性实施例中为螺旋弹簧,该弹性元件在背离电动马达16的方向上向蜗杆轴18施加轴向力。
[0043]
由于轴向加载,固定轴承26的滚动元件25与固定轴承26的轴承圈27接触。
[0044]
另外,弹性元件32用于补偿公差。
[0045]
在面向电动马达16的端面34上,蜗杆轴18具有凹部36,弹性元件32布置在该凹部中。
[0046]
弹性元件32的一端在轴向方向上支撑在调节元件38上。
[0047]
在图1所展示的实施例中,调节元件38是衬套,该衬套被压入凹部36中。
[0048]
调节元件38布置在弹性元件32与凹部36的底部37之间。
[0049]
调节元件38可以是铣削件或深拉件。
[0050]
弹性元件32的另一端支撑在另外的衬套40上,该另外的衬套无游隙地容纳在凹部中并且可移位地安装。
[0051]
在根据图1的示例性实施例中,衬套40是铣削件。
[0052]
延伸部41形成在衬套40上,弹性元件32被推到该延伸部上。因此,简化了传动机构组件14的组装。另外,延伸部41防止了弹性元件32的屈曲。
[0053]
另外,弹性元件32稍微容纳在调节元件38中。
[0054]
因为弹性元件32容纳在调节元件38中并且被附加地推到延伸部41上,因此弹性元件32在其整个长度上被稳定地支撑。
[0055]
在示例性实施例中,衬套40和调节元件38都具有圆形截面。然而,其他的截面也是可以设想的,例如椭圆形截面或角形截面。
[0056]
在与弹性元件32相反的端部,衬套40具有凹部42,驱动轴22的端部区段容纳在该凹部中。
[0057]
弹性元件32因此首先将衬套40推靠在电动马达16的驱动轴22上,并且其次背离驱动轴22推动蜗杆轴18。以此方式补偿了轴向公差链。
[0058]
另外,联接装置24被由弹性元件32引起的轴向力轴向加载在固定轴承26上。
[0059]
根据本发明,调节元件38的形成方式为使得当蜗杆轴18上的轴向力超过限定阈值时,该调节元件允许弹性元件32在轴向方向上伸展,并且当蜗杆轴18上的轴向力低于限定阈值时,该调节元件限制弹性元件32的伸展。
[0060]
特别地,由弹性元件32引起的轴向力不应超过280n,优选地为250n。在较高轴向力的情况下,传动机构组件14中将出现大摩擦,结果是传动机构组件变得僵硬。
[0061]
为此目的,调节元件38在凹部36中的压配合的设计方式为使得当轴向力超过阈值时,调节元件38在凹部36中移位。
[0062]
这意味着,如果弹性元件32由于不利的公差情况而被如此高度地压缩以致蜗杆轴18上的轴向力超过阈值,则调节元件38在凹部36中移位。
[0063]
由于调节元件38的移位,特别是朝凹部36的底部37的方向的移位,弹性元件32可以松弛,从而减小了轴向力。
[0064]
如果轴向力减小到不再超过阈值的程度,则调节元件38不再进一步移位。
[0065]
压配合受调节元件38的直径和凹部36的直径影响,这些直径彼此匹配。
[0066]
另外,肋可以模制在调节元件38上或在凹部36中并且/或者调节元件38可以被开缝以优化压配合。
[0067]
图2示出了电动马达辅助转向系统10的另外的实施例。根据图2的转向系统10与根据图1的转向系统10的不同之处在于弹性元件32和调节元件38的布置。
[0068]
特别地,根据图2所展示的实施例的调节元件38被压到衬套40上,其方式为使得当超过阈值时,调节元件38可相对于衬套40移位。
[0069]
更具体地,调节元件38被压到衬套40的延伸部41上。
[0070]
在这种情况下,弹性元件32布置在凹部36的底部37与调节元件38之间。
[0071]
调节元件38例如是深拉件。
[0072]
然而,传动机构组件14的功能原理没有改变。
[0073]
这意味着如果弹性元件32由于不利的公差情况而被如此高度地压缩以致蜗杆轴18上的轴向力超过阈值,则调节元件38在衬套40上、特别是在延伸部41上移位,使得弹性元件32可以松弛,具体地松弛到轴向力不再超过阈值的程度。
[0074]
在根据图2的示例性实施例中的凹部36的底部37中,存在附加的凹部44,弹性元件32稍微容纳在该附加的凹部中。因此,弹性元件32被特别稳定地支撑。
[0075]
图3示出了穿过用于根据另外的实施例的转向系统10的传动机构组件14的截面。
[0076]
图3所展示的实施例基本上对应于图2所展示的实施例,不同之处在于衬套40和调节元件38都形成为深拉件。
[0077]
另外,图3所展示的调节元件38是罐形的,并且弹性元件32部分地容纳在调节元件38中。这用于改进对弹性元件32的引导。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1