陆地机器人的控制方法
1.本发明涉及自动控制技术领域,特别是涉及一种陆地机器人的控制方法。
背景技术:
2.目前,在工业生产及日常生活中,机器人都已经是常用工具。现有的陆地机器人,存在跳跃不方便以至于越过较大障碍物时比较困难的技术问题。
技术实现要素:
3.本发明要解决的技术问题是提供一种跨越障碍的能力较强、适用范围更广的陆地机器人的控制方法。
4.为了解决上述技术问题,本技术提供了如下技术方案:
5.本发明陆地机器人的控制方法,包括下述步骤:
6.(一)检测陆地机器人周围环境中是否有障碍物,若无障碍物则进行正常行走,若有障碍物则进行步骤(二);
7.(二)检测所述障碍物的尺寸大小,以判断是否可以跳跃跨过所述障碍物,若能跳跃跨过,则所述陆地机器人进行弹跳,若不能跳跃跨过,则进行步骤(三);
8.(三)检测所述障碍物的坡度,以判断是否可以对所述障碍物进行攀爬,若能攀爬,则所述陆地机器人进行攀爬。
9.本发明陆地机器人的控制方法,其中所述陆地机器人包括环境信息传感器、上位机,在步骤(一)中,所述环境信息传感器采集周围环境的图像信息,并将采集的所述图像信息传输至上位机,所述上位机根据所述图像信息判断周围环境中是否有障碍物。
10.本发明陆地机器人的控制方法,其中所述环境信息传感器包括摄像机、雷达、红外探测仪。
11.本发明陆地机器人的控制方法,其中所述陆地机器人还包括机体、至少两条第一支腿、至少两条第二支腿,所述第一支腿、所述第二支腿均与所述机体相连接,在步骤(二)中,使所述第一支腿、所述第二支腿进行角度调整,所述第一支腿进行弹跳动作,在弹跳运动过程中,所述第二支腿不触地,直至要结束弹跳运动时,在所述机体落地时,仅所述第二支腿触地,所述第一支腿收起,所述第二支腿用于缓冲弹跳冲击。
12.本发明陆地机器人的控制方法,其中所述第一支腿包括第一支腿第一节、第一支腿第二节、第一支腿第三节,所述第一支腿第二节一端与所述第一支腿第一节的一端相铰接、另一端与所述第一支腿第三节的一端相铰接,所述第一支腿第一节的另一端与所述机体相连接,所述第一支腿第三节的另一端用于接触地面,在所述步骤(二)中,所述第一支腿第三节垂直于地面,所述第一支腿第三节进行弹跳。
13.本发明陆地机器人的控制方法,其中所述第一支腿第三节包括支腿壳体、第一支腿电机、弹簧、第一弹簧压块、第二弹簧压块,所述第一支腿电机、所述弹簧、所述第一弹簧压块均设置于所述支腿壳体内,所述第二弹簧压块设置于所述支腿壳体外,所述第一弹簧
压块、所述第二弹簧压块分别连接于所述弹簧的两端,所述弹簧沿所述支腿壳体的长度方向设置,所述第一支腿电机与所述第一弹簧压块相连接,在所述步骤(二)中,所述第一支腿电机压缩所述弹簧存储弹性能,使所述第一支腿进行弹跳动作。
14.本发明陆地机器人的控制方法,其中在所述步骤(二)中,所述环境信息传感器采集周围环境中障碍物的图像信息传输至所述上位机,所述上位机将所述图像信息中所述障碍物尺寸与所述第一支腿跳跃的最大高度和最远距离进行对比,若所述第一支腿跳跃的最大高度和最远距离大于所述障碍物的尺寸,则判断能够跳跃跨过所述障碍物。
15.本发明陆地机器人的控制方法,其中在所述步骤(一)中,在所述正常行走过程中,所述第一支腿与所述第二支腿的行走方式相同,其中所述第一支腿第一节相对所述机体在平行于地面的方向内旋转,以带动所述机体移动,所述第一支腿第二节在垂直于地面的方向内旋转,所述第一支腿第三节在垂直于地面的方向内旋转。
16.本发明陆地机器人的控制方法,其中在所述步骤(三)中,所述环境信息传感器采集周围环境中障碍物的图像信息传输至所述上位机,所述上位机将所述图像信息中所述障碍物的坡度大小进行判断,如果所述障碍物的坡度大于60
°
,则判断无法攀爬,如果所述障碍物的坡度小于60
°
,则可以攀爬。
17.本发明陆地机器人的控制方法,其中在所述步骤(三)中,在所述攀爬过程中,所述第一支腿第二节与所述机体顶面平行,所述第一支腿第三节与所述机体的侧壁平行,所述第一支腿第一节相对所述机体旋转以带动所述机体攀爬。
18.与现有技术相比,本发明陆地机器人的控制方法至少具有以下有益效果:
19.本发明陆地机器人的控制方法,由于能够检测障碍物的尺寸大小,以进行跳跃跨过障碍物或攀爬越过障碍物,因此提高了陆地机器人跨越障碍的能力,扩大了陆地机器人的适用范围。
20.下面结合附图对本发明陆地机器人的控制方法作进一步说明。
附图说明
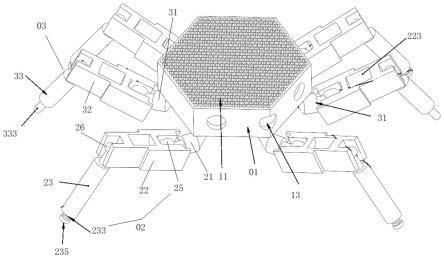
21.图1为本发明中陆地机器人的结构示意图;
22.图2为本发明中陆地机器人机体的结构示意图;
23.图3为本发明中陆地机器人蜂巢形凹槽的结构示意图;
24.图4为本发明中陆地机器人蜂巢形凹槽侧边的结构示意图;
25.图5为本发明中陆地机器人第一支腿第一节的结构示意图;
26.图6为本发明中陆地机器人第二转动副的结构示意图;
27.图7为本发明中陆地机器人第一支腿第二节的结构示意图;
28.图8为本发明中陆地机器人第一支腿第三节的结构示意图;
29.图9为本发明中陆地机器人第二支腿第三节的结构示意图。
具体实施方式
30.如图1所示,一种陆地机器人,包括机体01、两条或多条第一支腿02、两条或多条第二支腿03及控制单元,第一支腿02、第二支腿03均与机体01相连接,第一支腿02、第二支腿03适于带动机体01移动,第一支腿02与第二支腿03相互交叉设置,控制单元与第一支腿02、
第二支腿03均相互连接,控制单元适于控制第一支腿02转动及跳跃,控制单元适于控制第二支腿03转动及触地时缓冲。由于控制单元能够控制第一支腿02转动及跳跃,并控制第二支腿03转动及触地时缓冲,因此能够在有限的空间内进行较大的转体运动,并且可以通过跳跃加快运动速度、越过普通机器人行走时无法越过的障碍,同时缓冲跳跃带来的冲击,延长使用寿命。
31.可选地,如图2所示,机体01为板状体,机体01的顶面及底面上分别设置有多个蜂巢形凹槽11,减轻机体01的重量。
32.可选地,如图3、图4所示,蜂巢形凹槽11的横截面形成六边形结构,六边形结构由三个全等的菱形拼接形成,菱形的两锐角为70
°
32
′
,两钝角为109
°
28
′
,蜂巢形凹槽11孔口的横截面积大于孔底的横截面积,蜂巢形凹槽11的孔壁倾斜度为13
°
。由于机体01上设置有蜂巢形凹槽11,使机体01深度仿生自然界中的蜂巢,更省料、结构更坚固,延长本发明陆地机器人的使用寿命。
33.可选地,如图1、图5、图7、图8所示,第一支腿02包括第一支腿第一节21、第一支腿第二节22、第一支腿第三节23、第一节驱动单元、第二节驱动单元、第三节驱动单元,第一支腿第一节21呈l形,第一支腿第三节23适于弹跳,第一支腿第二节22一端与第一支腿第一节21的一端相铰接、另一端与第一支腿第三节23的一端相铰接,第一支腿第一节21的另一端与机体01相连接,第一支腿第三节23的另一端用于接触地面,第一节驱动单元适于带动第一支腿第一节21相对机体01在360
°
范围内旋转,第二节驱动单元适于带动第一支腿第二节22相对第一支腿第一节21旋转,第三节驱动单元适于带动第一支腿第三节23相对第一支腿第二节22旋转,第一节驱动单元、第二节驱动单元、第三节驱动单元及第一支腿第三节23均与控制单元连接,控制单元控制第一节驱动单元、第二节驱动单元、第三节驱动单元分别带动第一支腿第一节21、第一支腿第二节22、第一支腿第三节23转动,控制单元控制第一支腿第三节23弹跳。
34.可选地,还包括第一转动副24,第一支腿第一节21通过第一转动副24连接于机体01上,第一节驱动单元为第一舵机,第一舵机设置于第一转动副24内,第一舵机的两端分别连接机体01及第一支腿第一节21。第一舵机根据控制单元的指令带动第一支腿第一节21相对机体01转动设定的角度。
35.可选地,如图6、图7所示,还包括第二转动副25、第三转动副26,第二转动副25、第三转动副26均为销轴,第二节驱动单元为第二舵机、第三节驱动单元为第三舵机,第一支腿第二节22的两端分别设置有一组转动副连接槽221、222,第二转动副25、第三转动副26的中部均设置有连接孔,其中第二转动副25上开设有连接孔251,第一支腿第一节21的端部固定连接于第二转动副25的连接孔251内,第二转动副25两端分别连接于第一支腿第二节22一端的一组转动副连接槽221内,第二舵机设置于第二转动副25内,第一支腿第三节23的端部固定连接于第三转动副26中部的连接孔内,第三转动副26两端分别连接于第一支腿第二节22另一端的一组转动副连接槽222内,第三舵机设置于第三转动副26内,第一支腿第二节22上还开设有减重槽223,减轻第一支腿第二节22的重量。第二舵机、第三舵机根据控制单元的指令带动第一支腿第二节22、第一支腿第三节23转动设定的角度。
36.可选地,如图8所示,第一支腿第三节23包括支腿壳体231、第一支腿电机、弹簧233、第一弹簧压块234、第二弹簧压块235,第一支腿电机、弹簧233、第一弹簧压块234均设
置于支腿壳体231内,第二弹簧压块235设置于支腿壳体231外,第一弹簧压块234、第二弹簧压块235分别连接于弹簧233的两端,弹簧233沿支腿壳体231的长度方向设置,第一支腿电机与第一弹簧压块234相连接,第一支腿电机与控制单元相连接,控制单元控制第一支腿电机带动第一弹簧压块234压缩弹簧233。弹簧233采用高弹性系数弹簧,弹簧压缩后储存弹性势能以进行弹跳运动,为第一支腿起跳提供弹性能。
37.可选地,如图1、图9所示,第二支腿03包括第二支腿第一节31、第二支腿第二节32、第二支腿第三节33、第一节驱动单元、第二节驱动单元、第三节驱动单元,第二支腿03与第一支腿02不同之处仅在于,第二支腿第三节33包括第二壳体331、第二支腿电机332、第二滑块333,第二壳体331内设置有滑块腔体334,第二滑块333设置于滑块腔体334内,第二滑块333的长度大于滑块腔体334的长度,第二滑块333与滑块腔体334相匹配,滑块腔体334与第二滑块333之间设置有润滑油,减小第二滑块333的滑动摩擦力,第二支腿电机332与第二滑块333相连接,第二支腿电机332与控制单元相连接,控制单元控制第二支腿电机332带动第二滑块333沿滑块腔体334的长度方向移动,当第二支腿电机332带动第二滑块333向下移动,第二支腿03落地时,第二滑块333被第二支腿03的反作用力推动向上移动,起到缓冲作用,减少落地冲击对机体01所造成的伤害。
38.可选地,机体01中部设置有中空腔体12,控制单元包括上位机、主控制单元、环境信息传感器、传感器控制单元、第一支腿电机控制单元、第二支腿电机控制单元、多个舵机控制单元,主控制单元、传感器控制单元、第一支腿电机控制单元、第二支腿电机控制单元、舵机控制单元均设置于中空腔体12内,环境信息传感器将环境信息传输至上位机,第一支腿电机控制单元连接第一支腿电机,第二支腿电机控制单元连接第二支腿电机332,各舵机控制单元分别连接一个舵机,上位机根据环境信息传感器传输的信息控制主控制单元,主控制单元控制第一支腿电机控制单元、第二支腿电机控制单元及舵机控制单元。具体地,上位机与主控制单元通过蓝牙模块传输信息。由于机体01上设置有中空腔体12,不仅减轻机体01的重量,还为控制单元的设置提供便利,防止控制单元受损。
39.可选地,环境信息传感器包括摄像机、雷达、红外探测仪,机体01外侧壁上设置有多个凹槽13,摄像机、雷达、红外探测仪设置于凹槽13内。摄像机、雷达、红外探测仪用于采集机体01外的环境信息,并将信息传输至上位机。
40.可选地,第一支腿02设置有四条,第二支腿03设置有两条,机体01为六棱柱形板状体,第一支腿02、第二支腿03分别设置于机体01的一个顶点处,两条第二支腿03相互对称设置,四条第一支腿02相互对称设置。
41.本发明陆地机器人的控制方法,包括下述步骤:
42.(一)检测周围环境中是否有障碍物,若无障碍物则进行正常行走,若有障碍物则进行步骤(二);
43.(二)检测障碍物的尺寸大小,以判断是否可以跳跃跨过障碍物,若能跳跃跨过,则第一支腿02进行弹跳,若不能跳跃跨过,则进行步骤(三);
44.(三)检测障碍物的表面坡度,以判断是否可以对障碍物进行攀爬,若能攀爬,则陆地机器人进行攀爬。
45.本发明陆地机器人的控制方法,由于能够检测障碍物的尺寸大小,以进行跳跃跨过障碍物或攀爬越过障碍物,因此提高了陆地机器人跨越障碍的能力,扩大了陆地机器人
的适用范围。
46.可选地,在步骤(一)中,环境信息传感器采集周围环境的图像信息,并将所采集的图像信息传输至上位机,上位机根据图像信息判断周围环境中是否有障碍物。
47.可选地,在步骤(一)中,环境信息传感器包括摄像机、雷达、红外探测仪,摄像机、雷达、红外探测仪采集陆地机器人外的环境图像信息,并将环境图像信息传输至上位机。
48.可选地,在步骤(二)中,使第一支腿02的第一支腿第一节21、第一支腿第二节22、第一支腿第三节23相对旋转以进行相应的角度调整,调整后,第一支腿第三节23垂直于地面,第一支腿02进行弹跳动作,在弹跳运动过程中,第二支腿03不触地仅第一支腿02触地,直至要结束弹跳运动时,在机体01落地时,仅第二支腿03触地,第一支腿02收起,第二支腿03用于缓冲弹跳冲击。本发明陆地机器人的控制方法,由于在弹跳过程中仅第一支腿触地弹跳,减小弹跳过程中的摩擦力,弹跳结束时仅具有缓冲能力的第二支腿触地,能够缓冲跳跃带来的冲击,这种模式更适合短暂的通过正常行走无法越过的障碍或者通过较为坚硬的地面。
49.可选地,在步骤(二)中,压缩第一支腿第三节23的弹簧233存储弹性能,使第一支腿02进行弹跳动作,同时,使第二支腿03的第二滑块333下移,在弹跳运动过程中,第二支腿03进行相应的角度调整后收起,仅第一支腿02进行弹跳运动,直到要结束弹跳运动时,在机体01落地时,仅第二支腿03触地,第一支腿02收起。
50.可选地,在步骤(二)中,环境信息传感器采集周围环境中障碍物的图像信息传输至上位机,上位机将图像信息中障碍物尺寸与第一支腿02跳跃的最大高度和最远距离进行对比,若第一支腿02跳跃的最大高度和最远距离大于障碍物的尺寸,则判断能够跳跃跨过障碍物,否则则不能。
51.可选地,在步骤(一)中,在正常行走过程中,第一支腿02与第二支腿03的行走方式相同,其中第一支腿第一节21相对机体01在平行于地面的方向内旋转,以带动机体01移动,第一支腿第二节22在垂直于地面的方向内旋转,第一支腿第三节23在垂直于地面的方向内旋转,第一支腿电机、第二支腿电机332均不工作。
52.可选地,在步骤(三)中,环境信息传感器采集周围环境中障碍物的图像信息传输至上位机,上位机将图像信息中障碍物的坡度大小进行判断,如果障碍物的坡度大于60
°
,则判断无法攀爬,如果障碍物的坡度小于60
°
,则可以攀爬。
53.可选地,在步骤(三)中,在攀爬过程中,第一支腿第二节22与机体01顶面平行,第一支腿第三节23与机体01的侧壁平行,第一支腿第一节21相对机体01旋转以带动机体01攀爬。
54.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1