一种桌面级小型仿生四足机器人的制作方法
1.本实用新型涉及一种桌面级小型仿生四足机器人,属于机械技术和机器人领域。
背景技术:
2.近年来,四足机器人正在方方面面开始融入人的生活,包括陪伴、生产、教育等方面。目前的四足机器人普遍体型较大,成本较高。
3.由于舵机的特定长方体形状,如何布置舵机和设计传动机构以提高传动效率和运动性能成为关键问题。
4.使用无刷减速电机的四足通常具有较大的体积和较高的造价。舵机更适用在低成本和小型化四足机器人场景,使用舵机的四足机器人,一般膝关节舵机传动机构设计的不合理,目前存在的基于舵机模组的小型四足机器人的膝关节驱动舵机布置方案主要为:一种是位于大腿中部,通过球头拉杆进行小腿的传动,舵机输出角度和实际膝关节角度呈非线性关系,增加控制器解析量。第二种是将电机直接布局在膝关节处,致使膝关节体积较大,结构上不协调和外观不美观。这两种均会由于舵机本身的重量还会造成腿部较大的转动惯量。
技术实现要素:
5.为了克服现有技术的不足,本实用新型提供一种桌面级小型仿生四足机器人。
6.一种桌面级小型仿生四足机器人,使用单轴舵机作为驱动电机,髋关节摆动电机和膝关节电机布置在髋关节处,布置在髋关节处的髋关节电机通过两个四连杆机构传动到膝关节,具有12个自由度,机身布置和固定 12个舵机,大腿和小腿装配结构通过第一螺丝及第二螺丝与髋关节处大腿舵机和小腿舵机安装结构连接,髋关节处大腿舵机和小腿舵机安装结构通过髋关节外摆舵机舵盘及第七螺丝与髋关节处外摆舵机安装结构连接,大腿外侧固定及装饰件的一端通过第二轴承及短轴与小腿和大腿连接,小腿的一端与膝关节轴连接,膝关节轴的另一端与小腿传动过渡摇杆连接,小腿传动过渡摇杆与第一轴承连接,第一轴承安装在大腿的轴承座上,小腿舵机舵臂通过第一转动副固定件与小腿传动第一连杆连接,小腿传动第一连杆通过第二转动副固定件与大腿连接,膝关节轴通过第三转动副固定件及第四转动副固定件分别与小腿和大腿连接,第三螺丝连接大腿及大腿外侧固定及装饰件,舵盘通过第一螺丝组与大腿连接,膝关节舵机(小腿舵机)与髋关节摆动舵机(大腿舵机)之间有隔离板,膝关节舵机(小腿舵机)通过第四螺丝与大腿舵机和小腿舵机的外侧安装机架连接,小腿舵机的外侧安装机架及腿舵机和小腿舵机的内侧安装机架通过第五螺丝与加固板连接,髋关节摆动舵机(大腿舵机)通过第四螺丝与腿舵机和小腿舵机的内侧安装机架及小腿舵机的外侧安装机架连接,第六螺丝将髋关节处外摆舵机、左右侧髋关节外摆舵机固定板及髋关节处外摆舵机固定件连接,加固件通过铜柱与髋关节处外摆舵机固定件连接,前侧外摆款关节轴承支架通过第三轴承与髋关节处大腿舵机和小腿舵机安装结构连接,第八螺丝将前侧外摆款关节轴承支架与内螺纹螺柱连接,内螺纹螺柱的另一端与髋关
节处外摆舵机安装结构连接,前侧外摆款关节轴承支架通过第三轴承与髋关节处大腿舵机和小腿舵机安装结构连接,第八螺丝将前侧外摆款关节轴承支架与内螺纹螺柱连接,内螺纹螺柱的另一端与髋关节处外摆舵机安装结构连接,上盖装饰件通过第十四螺丝与电池及机身加固板连接,机身加固板通过第二螺丝组与前侧外摆款关节轴承支架连接,主控板及主控板保护壳通过第十螺丝及第九螺丝与前侧外摆款关节轴承支架连接,扩展电路板与主控板保护壳连接,髋关节外摆舵机侧边外壳通过第十一螺丝与髋关节处外摆舵机安装结构连接,舵机驱动和稳压板通过第十二螺丝与髋关节处外摆舵机安装结构连接,前侧功能扩展电路板通过第十三螺丝与后侧外摆款关节轴承支架连接。
7.大腿和小腿装配结构的小腿与足端缓冲脚垫连接,小腿舵机舵臂通过第一转动副固定件与小腿传动第一连杆连接,第一转动副固定件包括第一大圆头螺丝、第四轴承及第一内螺纹短轴的一端插入小腿舵机舵臂的配合孔中,小腿的一端通过第四转动副固定件与膝关节轴连接,第四转动副固定件包括第二大圆头螺丝、第五轴承及第二内螺纹短轴,第二内螺纹短轴的一端插入小腿的配合孔中。
8.本实用新型的优点是使用单轴舵机作为驱动电机,巧妙的将髋关节摆动电机和膝关节电机布置在髋关节处,降低了腿部的转动惯量,并提升了腿部的结构灵活性和美观性。
附图说明
9.当结合附图考虑时,通过参照下面的详细描述,能够更完整更好地理解本实用新型以及容易得知其中许多伴随的优点,但此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定,如图其中:
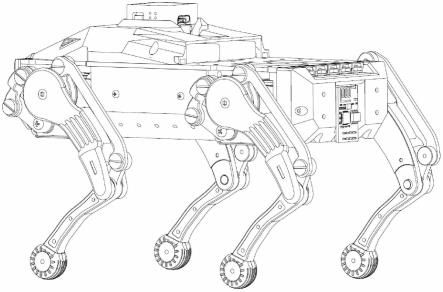
10.图1为本实用新型的结构图。
11.图2为本实用新型的局部结构之一示意图。
12.图3为本实用新型的局部结构之二示意图。
13.图4为本实用新型的局部结构之三示意图。
14.图5为本实用新型的局部结构之四示意图。
15.图6为本实用新型的大腿和小腿装配结构图。
16.图7为本实用新型的局部结构之五示意图。
17.图8为本实用新型的局部结构之六示意图。
18.图9为本实用新型的局部结构之七示意图。
19.图10为本实用新型的局部结构之八示意图。
20.图11为本实用新型的局部结构之九示意图。
21.图12为本实用新型的大腿示意图。
22.图13为本实用新型的总体框架图。
23.图中:大腿和小腿装配结构101,髋关节处大腿舵机和小腿舵机安装结构102,髋关节处外摆舵机安装结构103,大腿1,小腿2,小腿舵机舵臂3,小腿传动第一连杆4,小腿传动过渡摇杆5,膝关节轴6,大腿外侧固定及装饰件7,足端缓冲脚垫8,第一螺丝9,第一轴承10,第二轴承 11,短轴12,第二螺丝13,第三螺丝14,舵盘15,第一螺丝组16,第一转动副固定件17,第二转动副固定件18,第三转动副固定件19,第四转动副固定件20,膝关节舵机(小腿舵
机)21,髋关节摆动舵机(大腿舵机)22,隔离板23,第四螺丝24,大腿舵机和小腿舵机的外侧安装机架25,腿舵机和小腿舵机的内侧安装机架26,加固板27,第五螺丝28,髋关节处外摆舵机29,髋关节处外摆舵机固定件30,加固件31,铜柱32,左右侧髋关节外摆舵机固定板33,第六螺丝34,髋关节外摆舵机舵盘35,第七螺丝36,第三轴承37,前侧外摆款关节轴承支架38,内螺纹螺柱39,第八螺丝40,主控板41,第九螺丝42,主控板保护壳43,第十螺丝44,扩展电路板45,髋关节外摆舵机侧边外壳46,第十一螺丝47,舵机驱动和稳压板48,第十二螺丝49,前侧功能扩展电路板50,第十三螺丝51,机身加固板52,第二螺丝组53,电池54,上盖装饰件55,第十四螺丝 56。
具体实施方式
24.下面结合附图和实施例对本实用新型进一步说明。
25.显然,本领域技术人员基于本实用新型的宗旨所做的许多修改和变化属于本实用新型的保护范围。
26.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
27.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
28.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语包括技术术语和科学术语具有与所属领域中的普通技术人员的一般理解相同的意义。
29.实施例1:如图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12及图13所示,一种桌面级小型仿生四足机器人,大腿和小腿装配结构101通过第一螺丝9及第二螺丝13与髋关节处大腿舵机和小腿舵机安装结构102连接,髋关节处大腿舵机和小腿舵机安装结构102通过髋关节外摆舵机舵盘35及第七螺丝36与髋关节处外摆舵机安装结构103连接。
30.大腿和小腿装配结构101的小腿2与足端缓冲脚垫8连接,大腿外侧固定及装饰件7的一端通过第二轴承11及短轴12与小腿2和大腿1连接,小腿2的一端与膝关节轴6连接,膝关节轴6的另一端与小腿传动过渡摇杆5连接,小腿传动过渡摇杆5与第一轴承10连接,第一轴承10安装在大腿1的轴承座上,小腿舵机舵臂3通过第一转动副固定件17与小腿传动第一连杆4连接,小腿传动第一连杆4通过第二转动副固定件18与大腿1连接,膝关节轴6通过第三转动副固定件19及第四转动副固定件20 分别与小腿2和大腿1连接,第三螺丝14连接大腿1及大腿外侧固定及装饰件7,舵盘15通过第一螺丝组16与大腿1连接。
31.小腿舵机舵臂3通过第一转动副固定件17与小腿传动第一连杆4连接,第一转动副固定件17包括第一大圆头螺丝17-1、第四轴承17-2及第一内螺纹短轴17-3的一端插入小腿舵机舵臂3的配合孔中,小腿2的一端通过第四转动副固定件20与膝关节轴6连接,第四转动副固定件20 包括第二大圆头螺丝20-1、第五轴承20-2及第二内螺纹短轴20-3,第二内螺纹
短轴20-3的一端插入小腿2的配合孔中。
32.膝关节舵机(小腿舵机)21与髋关节摆动舵机(大腿舵机)22之间有隔离板23,膝关节舵机(小腿舵机)21通过第四螺丝24与大腿舵机和小腿舵机的外侧安装机架25连接,小腿舵机的外侧安装机架25及腿舵机和小腿舵机的内侧安装机架26通过第五螺丝28与加固板27连接,髋关节摆动舵机(大腿舵机)22通过第四螺丝24与腿舵机和小腿舵机的内侧安装机架26及小腿舵机的外侧安装机架25连接。
33.第六螺丝34将髋关节处外摆舵机29、左右侧髋关节外摆舵机固定板33及髋关节处外摆舵机固定件30连接,加固件31通过铜柱32与髋关节处外摆舵机固定件30连接。
34.前侧外摆款关节轴承支架38通过第三轴承37与髋关节处大腿舵机和小腿舵机安装结构102连接,第八螺丝40将前侧外摆款关节轴承支架38 与内螺纹螺柱39连接,内螺纹螺柱39的另一端与髋关节处外摆舵机安装结构103连接。
35.前侧外摆款关节轴承支架38通过第三轴承37与髋关节处大腿舵机和小腿舵机安装结构102连接,第八螺丝40将前侧外摆款关节轴承支架38 与内螺纹螺柱39连接,内螺纹螺柱39的另一端与髋关节处外摆舵机安装结构103连接,上盖装饰件55通过第十四螺丝56与电池54及机身加固板52连接,机身加固板52通过第二螺丝组53与前侧外摆款关节轴承支架38连接,主控板41及主控板保护壳43通过第十螺丝44及第九螺丝 42与前侧外摆款关节轴承支架38连接,扩展电路板45与主控板保护壳 43连接,髋关节外摆舵机侧边外壳46通过第十一螺丝47与髋关节处外摆舵机安装结构103连接,舵机驱动和稳压板48通过第十二螺丝49与髋关节处外摆舵机安装结构103连接,前侧功能扩展电路板50通过第十三螺丝51与后侧外摆款关节轴承支架连接。
36.实施例2:如图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12及图13所示,一种桌面级小型仿生四足机器人,针对膝关节的传动,用布置在髋关节处的髋关节电机通过两个四连杆机构传动到膝关节。
37.整个机器人具有12个自由度,提供了一种12个舵机的机身布置和固定方法,在不影响关节活动空间的前提下,保证了在此款舵机型号下四足机器人机身的最小体积。
38.机器人的机身结构件有很大一部分采用碳纤维板材料切割制成,保证固定效果的前提下降低了成本、减轻了重量,在一定程度上提升了轻量化水平。
39.该四足机器人采用全肘式的腿部设计方案,单侧腿部结构相同,对侧腿部结构呈镜像关系。
40.以下主要以左前侧腿部结构举例对结构进行说明。
41.大腿和小腿装配结构101,大腿和小腿装配结构如图6所示,其中小腿通过两个双摇杆机构进行传动。
42.髋关节处大腿舵机和小腿舵机安装结构102,髋关节处外摆舵机安装结构103呈前后镜像、左右镜像结构。
43.一个大腿和小腿装配结构101、四个髋关节处大腿舵机和小腿舵机安装结构102及四个髋关节处外摆舵机安装结构103构成了机器人的整体基础结构。
44.通过小腿2传动第二连杆拉动绕膝关节轴6旋转。
45.小腿舵机舵臂3通过花键连接在小腿舵机输出轴上周向固定用于输出。该机器人上的12个舵机形状型号相同,输出轴端面上有螺纹孔,便于将舵机或者舵盘轴向固定。
46.小腿传动第一连杆4通过第一转动副固定件17及第二转动副固定件18将此连杆分别与小腿舵机舵臂3和小腿传动过渡摇杆5相连接,组成第一个双摇杆(四连杆)机构。
47.一种桌面级小型仿生四足机器人,包括第一转动副固定件17、第二转动副固定件18、第三转动副固定件19及第四转动副固定件20。
48.小腿传动过渡摇杆5包含了第二个双摇杆机构的主动摇杆和第一个双摇杆机构的被动摇杆,其张角是可以改变的,非必须固定角度值。
49.小腿传动第二连杆6通过第三转动副固定件19及第四转动副固定件 20将此连杆分别与小腿传动过渡摇杆5和小腿2相连接,组成第二个双摇杆(四连杆)机构。
50.大腿外侧固定及装饰件7通过一对第三螺丝14固定在大腿1上,同时提供膝关节轴承座。
51.足端缓冲脚垫8根据不同的地面环境进行更换。
52.第一螺丝9将小腿舵机舵臂3固定在小腿舵机输出轴上,起到轴向固定的作用。
53.第一轴承10安装在大腿1的轴承座上,其轴承的轴线和大腿舵机输出轴的轴线共线,并与小腿传动过渡摇杆5紧配合安装,使小腿传动过渡摇杆5绕大腿舵机的输出轴轴线旋转。
54.第二轴承11用于承担小腿2和大腿1连接处的径向载荷,左右两个分别装配在大腿外侧固定及装饰件7和大腿1的轴承座里。
55.短轴12与小腿2连杆上的膝关节孔紧配合,通过第二轴承11径向固定。
56.第二螺丝13一方面将舵盘15在轴向固定在大腿舵机输出轴上,另一方面将大腿外侧固定及装饰件7顶紧第一轴承10内圈,将第一轴承10 进行轴向上的固定。
57.第三螺丝14将大腿外侧固定及装饰件7固定在大腿1上。
58.舵盘15通过花键周向固定在大腿电机输出轴上,连接在大腿舵机输出轴上用于输出。
59.第一螺丝组16有4-8个,将舵盘15固定在大腿1上。
60.第一转动副固定件17、第二转动副固定件18、第三转动副固定件19 及第四转动副固定件20用于转动副处的连接。
61.第一转动副固定件17包括第一大圆头螺丝17-1、第四轴承17-2及第一内螺纹短轴17-3的一端插入所安装零件的配合孔里,从而径向固定,通过大圆头螺丝将轴轴向固定,轴承安装在轴上。
62.第四转动副固定件20包括第二大圆头螺丝20-1、第五轴承20-2及第二内螺纹短轴20-3。
63.第一转动副固定件17、第二转动副固定件18、第三转动副固定件19 及第四转动副固定件20的结构相同。
64.隔离板23填充膝关节舵机(小腿舵机)21和髋关节摆动舵机(大腿舵机)22舵机之间的空间并将该两个舵机隔离。
65.第四螺丝24有左右各4个,将膝关节舵机(小腿舵机)21和髋关节摆动舵机(大腿舵机)22固定在大腿舵机和小腿舵机的外侧安装机架25 和大腿舵机和小腿舵机的内侧安装机架26上。
66.大腿舵机和小腿舵机的内侧安装机架26同时连接髋关节外摆舵机舵盘。
67.加固板27为碳纤维板材,通过螺丝固28定在大腿舵机和小腿舵机25 的外侧安装机架和大腿舵机和小腿舵机26的内侧安装机架上,进而使膝关节舵机(小腿舵机)21、髋关节摆动舵机(大腿舵机)22、大腿舵机和小腿舵机的外侧安装机架25、大腿舵机和小腿舵机的内侧安装机架26及加固板27等在一起形成一个更加稳定的结构,提高固定效果。
68.第五螺丝28有8个,第五螺丝28于将加固板27加固板固定在小腿舵机的外侧安装机架25的外侧安装机架和大腿舵机和小腿舵机26的外侧安装机架上。
69.髋关节处外摆舵机固定件30将单侧前后两个髋关节外摆舵机固定。
70.四个髋关节外摆舵机安装加固件31为碳纤维板材,通过铜柱32固定在髋关节处外摆舵机固定件30上,起到加强结构和保护髋关节外摆舵机的作用。
71.铜柱32的一端为外螺纹,铜柱32的另一端为内螺纹,将髋关节外摆舵机安装加固件31固定的同时提供螺纹孔用于机身加固板52的安装。
72.左右侧髋关节外摆舵机固定板33为碳纤维板材,通过第六螺丝34将前侧两只腿的髋关节外摆舵机固定。
73.第六螺丝34的左右侧的各两个螺丝直接拧在髋关节处外摆舵机固定件30上的螺纹孔里,中间的四个螺丝通过螺母进行紧固。
74.髋关节外摆舵机舵盘35通过花键周向固定在髋关节外摆舵机29的输出轴上,通过一个螺丝将舵盘轴向固定在输出轴上。
75.第七螺丝36将髋关节外摆舵机舵盘35固定在大腿舵机和小腿舵机的内侧安装机架26上。
76.第三轴承37安装在大腿舵机和小腿舵机25的外侧安装机架上,该轴承的旋转轴和髋关节外摆舵机的输出轴同轴,用于承受髋关节外摆关节处的径向载荷。
77.前侧外摆款关节轴承支架38为前侧后侧各一个,提供前侧左右腿的髋关节外摆处轴承的安装轴承座,同时提供很多阵列式的螺纹孔,便于安装其他拓展件。
78.内螺纹螺柱39为前后对称,通过螺丝将其一端固定在髋关节处外摆舵机安装结构103上。
79.第八螺丝40将前侧外摆款关节轴承支架38固定在内螺纹螺柱上。
80.第九螺丝42有4个,将主控板固定在后侧外摆款关节轴承支架上。
81.主控板保护壳43保护主控板并提高美观性。
82.第十螺丝44将主控板保护壳固定在后侧外摆款关节轴承支架上。
83.扩展电路板45在不拆卸主控板保护壳的状态下直接安装,通过排针进行电路连接。
84.髋关节外摆舵机侧边外壳46为左右两边各一个,镜像关系。
85.第十一螺丝47有左右各两个,将46髋关节外摆舵机侧边外壳固定在 30髋关节处外摆舵机固定件上。
86.舵机驱动和稳压板48提供5v稳压给主控板供电,并获取舵机控制信息,通过连接线相连。
87.第十二螺丝49有四个,第十二螺丝49将舵机驱动和稳压板48固定在髋关节外摆舵机46侧边外壳上。
88.第十三螺丝51有左右各两个,第十三螺丝51将前侧功能扩展电路板 50固定在前
侧外摆款关节轴承支架38上。
89.机身加固板52为碳纤维板材,通过第二螺丝组53将其固定在上和前后侧两个外摆款关节轴承支架103,加强整个机身的强度。
90.第二螺丝组53将机身加固板52和外摆款关节轴承支架103、前后侧两个外摆款关节轴承支架相固定。
91.上盖装饰件55安装其他扩展传感器等模块。
92.第十四螺丝56有4个,将上盖装饰件和机身55固定。
93.四足机器人控制系统电路硬件包括主控板41和舵机驱动和稳压板 48,总体框架如图13所示,stm32微控制器最小系统作为控制核心,通过各类外设实现对自身和环境信息的采集,控制指令的处理,进而完成机器人姿态解算、步态规划、运动控制等任务。整个系统采用7.4v锂电池作为供电单元,并具备多种电源输入接口,7.4v电源经由降压模块后产生5v和3.3v两种电源用于板载各类设备的供电。esp8266接收网页指令通过usart1向stm32发送控制数据包,实现机器人运动模式的切换,姿态的控制,mpu6050用于检测自身姿态,通过i2c总线向stm32反馈信息, stm32通过adc采集锂电池电压,驱动蜂鸣器完成电量报警,上位机通过 usb转串口实现对四足机器人的标定、调试等功能,stm32通过i2c驱动 oled显示系统信息,该硬件系统具备两类伺服器的接口,总线舵机由 stm32的usart2控制,锂电池直接供电,pwm舵机接收经过光耦隔离后的 stm32的pwm控制信号,由降压模块输出的5v电源供电。
94.此12自由度(单腿三个自由度)四足机器人的腿部结构同样适用于8 自由度(单腿两个自由度)四足机器人。使用舵机驱动的小型四足机器人腿部结构更加精巧和更加合理。在使用此款舵机的情况下保证了最小的机身体积。髋关节处大腿舵机和小腿舵机安装结构102中的舵机摆放位置可以变化,只要保证两个输出轴的相对位置满足要求就可以。
95.如上,对本实用新型的实施例进行了详细地说明,但是只要实质上没有脱离本实用新型的发明点及效果可以有很多的变形,这对本领域的技术人员来说是显而易见的。因此,这样的变形例也全部包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1