一种自动驾驶前轮转角传感器及自动驾驶汽车的制作方法
1.本实用新型属于底盘控制技术领域,更具体地,涉及一种自动驾驶前轮转角传感器及自动驾驶汽车。
背景技术:
2.常用乘用车方向盘转角传感器一般安装在方向盘与多功能开关之间的管柱上,把方向盘位置、转向方向、转向速度通过光电信号反馈控制器,是车辆实时状态和驾驶员转向需求的一种重要装置,方向盘转角信号同时还是车身稳定系统esp/esc、主动悬架系统的车身侧倾控制,自适应前照灯系统(afs)、导航及辅助驾驶系统adas、智能泊车系统(apa)、eps转向系统重要的控制参数,是车辆行驶控制系统中一个组成部分。
3.未来汽车自动驾驶将采用线控转向,方向盘或被取消,这样方向盘转角信号就无法获取,这时,前轮转角信号可作为驾驶员的转向需求和车辆行驶状态最佳的控制参数。与方向盘转角信号相同,还是车身稳定系统esp/esc、主动悬架系统ecs,自适应前照灯系统(afs)、导航及辅助驾驶系统adas、智能泊车系统(apa)、eps等系统的重要控制参数。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的不足,提供一种自动驾驶前轮转角传感器,该自动驾驶前轮转角传感器用于替代方向盘转角传感器,有效监控前轮定位参数状态,减少行驶跑偏和轮胎偏磨现象发生,实现车辆转向控制和行驶稳定性控制,适应自动驾驶使用。
5.为了实现上述目的,本实用新型提供一种自动驾驶前轮转角传感器,包括:
6.轴承,所述轴承套设在麦弗逊悬架的转动轴上;
7.上支撑,所述上支撑的一侧与车身连接,所述上支撑的另一端设置有与所述转动轴相配合的限制槽,所述转动轴的一端转动连接在所述限制槽内;
8.磁钢,所述磁钢设置在所述上支撑上且位于所述转动轴的外周;
9.霍尔传感器,所述霍尔传感器设置在所述轴承上,所述霍尔传感器用于与所述磁钢配合生成脉冲信号;
10.处理模块,所述处理模块用于根据所述脉冲信号生成旋转角度信号,并将所述旋转角度信号传输给车辆控制系统。
11.可选的,所述磁钢包括多个磁粒,多个所述磁粒等距间隙排布形成环状结构。
12.可选的,所述霍尔传感器包括互相垂直的第一通道和第二通道,正转时所述第一通道超前所述第二通道90
°
,反转时所述第二通道超前所述第一通道90
°
。
13.可选的,所述转动轴包括:
14.减震器总成,所述减震器总成的一端侧壁与车轮铰接,所述减震器总成的另一端依次套设有弹簧下垫、螺旋弹簧、弹簧上垫、所述轴承、缓冲块、所述上支撑。
15.可选的,所述减震器总成上套设有防尘罩,所述防尘罩穿设在所述螺旋弹簧的内
部。
16.可选的,所述上支撑的外周设置有护罩,所述轴承、所述磁钢和所述霍尔传感器位于所述护罩内部。
17.一种自动驾驶汽车,包括:根据上述的自动驾驶前轮转角传感器。
18.可选的,所述自动驾驶前轮转角传感器至少与所述自动驾驶汽车的车身稳定系统esp/esc、主动悬架系统ecs、自适应前照灯系统、导航及辅助驾驶系统adas、智能泊车系统和eps中任一连接。
19.可选的,还包括:
20.方向盘转角传感器,所述方向盘转角传感器与所述自动驾驶汽车的控制系统连接,所述方向盘转角传感器与所述自动驾驶前轮转角传感器互为冗余备用。
21.本实用新型提供一种自动驾驶前轮转角传感器,其有益效果在于:
22.1、该自动驾驶前轮转角传感器用于替代方向盘转角传感器,有效监控前轮定位参数状态,减少行驶跑偏和轮胎偏磨现象发生,实现车辆转向控制和行驶稳定性控制,适应自动驾驶使用。
23.2、该自动驾驶前轮转角传感器能够与方向盘转角传感去互为冗余备用,提高车辆监控的准确性和安全性。
24.3、该自动驾驶前轮转角传感器结构合理,实现简单,制造修改费用成本低。
25.4、能有效提升车辆行驶稳定性和安全性,还能为后续l3/l4级自动驾驶提供支持,更好提供产品竞争力。
26.本实用新型的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
27.通过结合附图对本实用新型示例性实施方式进行更详细的描述,本实用新型的上述以及其它目的、特征和优势将变得更加明显,其中,在本实用新型示例性实施方式中,相同的参考标号通常代表相同部件。
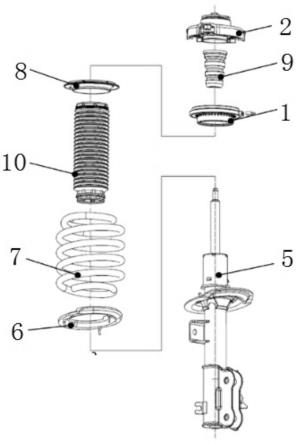
28.图1示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的结构示意图。
29.图2示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的磁粒的结构示意图。
30.图3示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的位置示意图。
31.图4示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的脉冲信号的示意图。
32.附图标记说明:
33.1、轴承;2、上支撑;3、磁钢;4、霍尔传感器;5、减震器总成;6、弹簧下垫;7、螺旋弹簧;8、弹簧上垫;9、缓冲块;10、防尘罩。
具体实施方式
34.下面将更详细地描述本实用新型的优选实施方式。虽然以下描述了本实用新型的
优选实施方式,然而应该理解,可以以各种形式实现本实用新型而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本实用新型更加透彻和完整,并且能够将本实用新型的范围完整地传达给本领域的技术人员。
35.图1示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的结构示意图;图2示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的磁粒的结构示意图;图3示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的位置示意图;图4示出了根据本实用新型的一个实施例的一种自动驾驶前轮转角传感器的脉冲信号的示意图。
36.如图1-4所示,一种自动驾驶前轮转角传感器,包括:
37.轴承1,轴承1套设在麦弗逊悬架的转动轴上;
38.上支撑2,上支撑2的一侧与车身连接,上支撑2的另一端设置有与转动轴相配合的限制槽,转动轴的一端转动连接在限制槽内;
39.磁钢3,磁钢3设置在上支撑2上且位于转动轴的外周;
40.霍尔传感器4,霍尔传感器4设置在轴承1上,霍尔传感器4用于与磁钢3配合生成脉冲信号;
41.处理模块,处理模块用于根据脉冲信号生成旋转角度信号,并将旋转角度信号传输给车辆控制系统。
42.具体的,汽车车身通过麦弗逊悬架连接车轮,通过自动驾驶前轮转角传感器替代方形盘角度传感器进行旋转角度监测,适应无方向盘的自动驾驶使用,磁钢3设置在上支撑2上呈环状分布,霍尔传感器4通过轴承1设置在转动轴上,随转动轴一同旋转,通过霍尔传感器4与磁钢3相对运动产生方向不同的脉冲信号,处理模块根据脉冲信号确认车轮的转动角度,进而方便操作控制车辆的转向。
43.在本实施例中,磁钢3包括多个磁粒,多个磁粒等距间隙排布形成环状结构。
44.具体的,磁粒的数量和间隙能欧根据控制精度调整。
45.进一步,多个磁粒等距间隙形成c状结构。
46.在本实施例中,霍尔传感器4包括互相垂直的第一通道和第二通道,正转时第一通道超前第二通道90
°
,反转时第二通道超前第一通道90
°
。
47.在本实施例中,转动轴包括:
48.减震器总成5,减震器总成5的一端侧壁与车轮铰接,减震器总成5的另一端依次套设有弹簧下垫6、螺旋弹簧7、弹簧上垫8、轴承1、缓冲块9、上支撑2。
49.在本实施例中,减震器总成5上套设有防尘罩10,防尘罩10穿设在螺旋弹簧7的内部。
50.具体的,通过螺旋弹簧7支撑车身重量且减振,减振器总成衰减振动,方便转动轴承1实现车轮和车身的相对转动。
51.在本实施例中,上支撑2的外周设置有护罩,轴承1、磁钢3和霍尔传感器4位于护罩内部。
52.具体的,通过护罩保护磁钢3和霍尔传感器4。
53.一种自动驾驶汽车,包括:根据上述的自动驾驶前轮转角传感器。
54.在本实施中例中,自动驾驶前轮转角传感器至少与自动驾驶汽车的车身稳定系统
esp/esc、主动悬架系统ecs、自适应前照灯系统、导航及辅助驾驶系统adas、智能泊车系统和eps中任一连接。
55.在本实施例中,还包括:
56.方向盘转角传感器,方向盘转角传感器与自动驾驶汽车的控制系统连接,方向盘转角传感器与自动驾驶前轮转角传感器互为冗余备用。
57.本实施例自动驾驶前轮转角传感器使用时,以自动驾驶汽车使用为例,磁钢3设置在上支撑2上呈环状分布,霍尔传感器4通过轴承1设置在转动轴上,随转动轴一同旋转,通过霍尔传感器4与磁钢3相对运动产生方向不同的脉冲信号,处理模块根据脉冲信号确认车轮的转动角度,进而方便操作控制车辆的转向。
58.以上已经描述了本实用新型的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1