一种基于ROS的搬运机器人的制作方法
一种基于ros的搬运机器人
技术领域
1.本实用新型属于机器人技术领域,具体涉及一种基于ros的搬运机器人。
背景技术:
2.智能仓储是物流过程的一个环节,智能仓储的应用,保证了货物仓库管理各个环节数据输入的速度和准确性,确保企业及时准确地掌握库存的真实数据,合理保持和控制企业库存。
3.目前的智能仓储,多采用基于ros系统的搬运机器人来实现对于货物的搬运,搬运时上下货物也多采用机械手来进行。
4.可现有技术中的搬运机器人,其在对货物进行运输时,由于运输时的速度较快,而机械手在上货时,无法确保货物在机器人上完全集中,故而在运输时易于出现偏移的情况,影响后续下货时机械手的抓取,实用性较低。
技术实现要素:
5.本实用新型的目的在于提供一种基于ros的搬运机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种基于ros的搬运机器人,包括搬运机构;
7.所述搬运机构包括机器人主体,所述机器人主体的两侧均对称构造有两个用于摆正并限制货物移动的定位机构;
8.所述定位机构包括构造于机器人主体一侧的铰接座一,所述铰接座一的一侧固定安装有延伸入铰接座一内的驱动件一,且驱动件一上固定安装有活动设置于铰接座一内的支撑臂,所述支撑臂的顶端构造有铰接座二,且铰接座二的一侧固定安装有延伸入铰接座二内的驱动件二,所述驱动件二上固定安装有活动设置于铰接座二内的限位爪。
9.优选的,所述机器人主体顶端的一侧对称构造有两根支架,且两根支架的顶端之间转动安装有控制面板。
10.优选的,所述机器人主体两侧的底端远离支架的一侧均转动安装有驱动轮,且机器人主体的底端远离驱动轮的一侧居中安装有支撑轮。
11.优选的,所述驱动件一包括转动安装于铰接座一内的轴杆,所述轴杆的一端连接有固定于铰接座一一侧的舵机一,且支撑臂的一端居中固定安装于轴杆上。
12.优选的,所述驱动件二包括转动安装于铰接座二内的传动轴,所述传动轴延伸出铰接座二的一端连接有固定于铰接座二一侧的舵机二,且传动轴居中固定安装于传动轴上。
13.本实用新型的技术效果和优点:该基于ros的搬运机器人,得益于搬运机构上定位机构的设置,通过启动驱动件一,即可驱动支撑臂以驱动件一为轴心转动,通过多个同步摆动的支撑臂可推挤机器人主体上摆放的货物进行摆正,摆正完成后,即可通过多个支撑臂
由两侧对货物进行夹持定位,从而防止其在运输的过程中出现偏移,便于后续下货时机械手的抓取,实用性较强;
14.得益于定位机构的设置,通过驱动件二驱动限位爪于铰接座二内转动,即可对超出支撑臂摆动范围的货物进行摆正,或是对处于支撑臂摆动范围的货物进行进一步的夹持固定,有效避免了尺寸超高货物或过多的小件堆叠而因晃动掉落情况出现,实用性较强。
附图说明
15.图1为本实用新型的结构示意图;
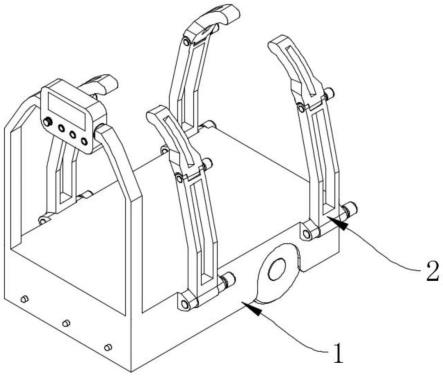
16.图2为本实用新型搬运机构的结构示意图;
17.图3为本实用新型定位机构的结构示意图。
18.图中:1、搬运机构;101、机器人主体;102、驱动轮;103、支架;104、控制面板;2、定位机构;201、铰接座一;202、支撑臂;203、铰接座二;204、限位爪;205、轴杆;206、舵机一;207、传动轴;208、舵机二。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.为防止货物在运输的过程中出现偏移,便于后续下货时机械手的抓取,如图1、图2、图3所示,该基于ros的搬运机器人,包括搬运机构1,所述搬运机构1包括机器人主体101,所述机器人主体101的两侧均对称构造有两个用于摆正并限制货物移动的定位机构2,所述定位机构2包括构造于机器人主体101一侧的铰接座一201,所述铰接座一201的一侧固定安装有延伸入铰接座一201内的驱动件一,且驱动件一上固定安装有活动设置于铰接座一201内的支撑臂202,所述驱动件一包括转动安装于铰接座一201内的轴杆205,所述轴杆205的一端连接有固定于铰接座一201一侧的舵机一206,且支撑臂202的一端居中固定安装于轴杆205上,通过启动舵机一206,即可驱动支撑臂202以轴杆205为轴心转动,通过多个同步摆动的支撑臂202可推挤机器人主体101上摆放的货物进行摆正,摆正完成后,即可通过多个支撑臂202由两侧对货物进行夹持定位,从而防止其在运输的过程中出现偏移,便于后续下货时机械手的抓取,实用性较强。
21.为避免大尺寸货物或过多的小尺寸货物堆叠而因晃动掉落情况出现,如图3所示,所述支撑臂202的顶端构造有铰接座二203,且铰接座二203的一侧固定安装有延伸入铰接座二203内的驱动件二,所述驱动件二上固定安装有活动设置于铰接座二203内的限位爪204,所述驱动件二包括转动安装于铰接座二203内的传动轴207,所述传动轴207延伸出铰接座二203的一端连接有固定于铰接座二203一侧的舵机二208,且传动轴207居中固定安装于传动轴207上,通过启动舵机二208驱动限位爪204于铰接座二203内转动,从而对超出支撑臂202摆动范围的大尺寸货物进行摆正,或是对处于支撑臂202摆动范围的多件小尺寸货物进行进一步的夹持固定,有效避免了大尺寸货物或过多的小尺寸货物堆叠而因晃动掉落情况出现,实用性较强。
22.为实现对于货物摆正和运输的自动化控制,如图2、图3所示,具体的,所述机器人主体101顶端的一侧对称构造有两根支架103,且两根支架103的顶端之间转动安装有控制面板104,所述机器人主体101两侧的底端远离支架103的一侧均转动安装有驱动轮102,且机器人主体101的底端远离驱动轮102的一侧居中安装有支撑轮,通过控制面板104,配合机器人主体101连接库房内的ros控制系统,以启动两个驱动轮102转动,并规划该机器人主体101与库房内的动线,实现对于货物的运输,并通过控制面板104实时检测多个舵机一206和多个舵机二208的力反馈,结合当前搬运货物的重量,确定是否完成摆正,提高运输效率,可自动化程度。
23.工作原理:该基于ros的搬运机器人,使用时,当机械手将货物搬运时机器人主体101上时,即可启动多台舵机一206,通过该舵机一206带动安装有支撑臂202的传动轴207转动,对摆放于机器人主体101上未摆正的货物进行调正,再配合多个同步摆动的支撑臂202即可完成对于货物的初步夹持定位,再启动多台舵机二208,通过舵机二208带动安装有限位爪204的传动轴207转动,即可通过传动轴207对处于支撑臂202摆动范围内的货物进行进一步的夹持固定,有效降低了过多小件堆叠而易于掉落的风险,而若货物因尺寸超高而超出支撑臂202的摆动范围,则可通过多个限位爪204对其进行摆正和夹持定位,使用方便,操作简单。
24.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1