轮足机器人及轮足移动终端的制作方法
本技术属于机器人,特别是涉及一种轮足机器人及轮足移动终端。
背景技术:
1、轮足机器人是将一个或多个轮子安装在足式关节上的移动机器人,轮足机器人可同时兼顾轮式的快速移动和足式的强越障性能。轮足机器人可分为跪式(轮子安装在膝关节和踝关节)和立式(轮子安装在膝关节)两大类,跪式机器人轮子移动时膝关节和踝关节都接触地面,立式机器人轮子移动时只有踝关节接触地面;轮足机器人根据腿的数量一般可分为:两轮足、四轮足、六轮足和八轮足等。一般情况下,腿的数量越多平衡稳定性越好、载重越大和越障能力强,但是机器人的体积会较大,不利于通过狭小的空间。
2、目前,两轮足机器人主要存在载重小、越障能力差和无法稳定的上下楼梯等不足之处,无法作为一种常规的载人出行工具,从而极大的限制了两轮足机器人的应用场景。
3、申请号为cn201910677901.7的中国专利申请公开了一种双轮足混合自平衡机器人,包括躯干支架,在躯干支架的两侧对称地设置有支腿组件;支腿组件包括大腿支架、小腿支架、辅助腿连杆、轮毂电机、髋关节电机以及膝关节储能弹簧;轮毂电机安装在小腿支架的底部,大腿支架的一端与小腿支架通过铰链连接,膝关节储能弹簧与铰链同轴,膝关节储能弹簧一端卡在小腿支架上,另一端卡在大腿支架上;大腿支架的另一端固定在髋关节电机的输出端,髋关节电机安装在躯干支架中;该辅助腿连杆的一端与小腿支架通过铰链连接,另一端与躯干支架通过铰链连接。
4、但是,该双轮足混合自平衡机器人膝关节只设置了储能弹簧,上下楼梯只能以弹跳的方式进行,越障能力较差。
技术实现思路
1、本实用新型所要解决的技术问题是:针对现有的双轮足混合自平衡机器人膝关节只设置了储能弹簧,上下楼梯只能以弹跳的方式进行,越障能力较差的问题,提供一种轮足机器人及轮足移动终端。
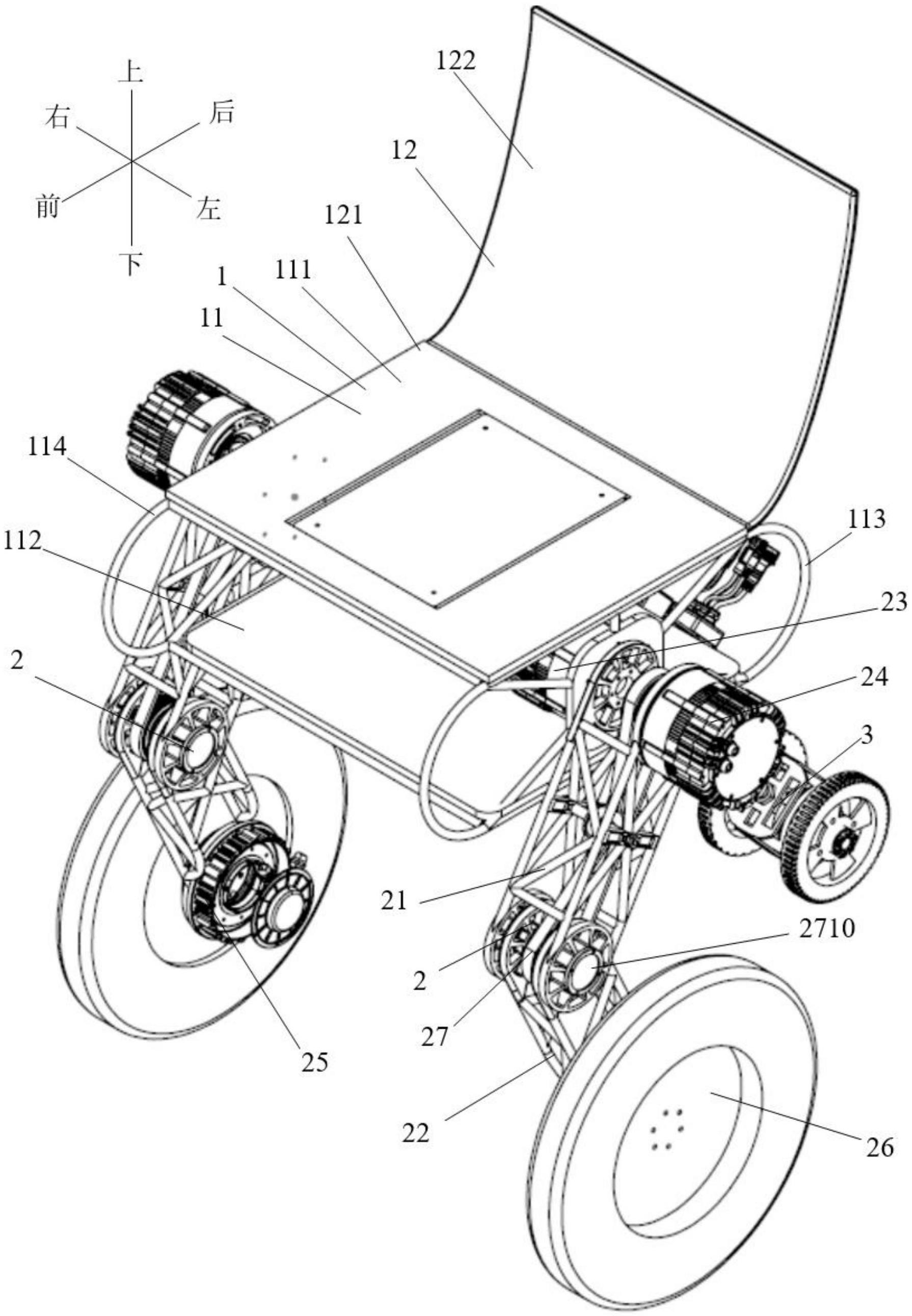
2、为解决上述技术问题,一方面,本实用新型实施例提供一种轮足机器人,包括框架及连接在所述框架的左右两侧的机器腿组件,每一所述机器腿组件包括大腿支架、小腿支架、髋关节电机、膝关节电机、主驱动轮电机及主驱动轮轮胎;所述大腿支架的上端与所述框架转动连接,所述大腿支架的下端与所述小腿支架的上端转动连接,所述主驱动轮轮胎与所述小腿支架的下端转动连接;
3、所述髋关节电机安装在所述框架上,用于驱动所述大腿支架相对于所述框架旋转;
4、所述膝关节电机安装在所述大腿支架上,用于驱动所述小腿支架相对于所述大腿支架旋转;
5、所述主驱动轮电机安装在所述小腿支架上,用于驱动所述主驱动轮轮胎相对于所述小腿支架旋转。
6、可选地,所述髋关节电机设置在所述框架内并位于所述大腿支架的内侧,所述髋关节电机的输出轴连接在所述大腿支架的上端内侧。
7、可选地,所述膝关节电机设置在所述大腿支架的上端外侧并与所述髋关节电机相对;
8、所述轮足机器人还包括连接在所述膝关节电机的输出轴与所述小腿支架之间的传动装置,所述膝关节电机通过所述传动装置驱动所述小腿支架相对于所述大腿支架旋转。
9、可选地,所述传动装置包括主动带轮、主动带轮轴、从动带轮、从动带轮轴及同步带,所述主动带轮轴的一端连接所述膝关节电机的输出轴,所述主动带轮轴的另一端伸入所述大腿支架内,所述主动带轮固定在所述主动带轮轴上并位于所述大腿支架内,所述从动带轮轴转动连接在所述大腿支架的下端,所述从动带轮固定在所述从动带轮轴上并与所述小腿支架固定连接,所述同步带绕设在所述主动带轮及从动带轮上。
10、可选地,所述传动装置还包括在所述大腿支架的长度方向上位于所述主动带轮与从动带轮之间的同步带张紧装置;
11、所述同步带张紧装置包括张紧轮、张紧轮轴及两个张紧轮套筒,所述张紧轮轴的两端固定在所述大腿支架上,所述张紧轮套筒通过轴承转动连接在所述张紧轮轴上,两个所述张紧轮套筒从轴向两侧夹紧所述张紧轮,以限制所述张紧轮的轴向位移;所述张紧轮与所述同步带接触以张紧所述同步带。
12、可选地,所述传动装置还包括膝关节轴承,所述大腿支架的下端左右两侧分别设置有轮辋结构,每一所述轮辋结构的内孔中安装有一所述膝关节轴承,所述从动带轮轴的两端安装在所述膝关节轴承的内圈中;
13、所述膝关节轴承的远离所述从动带轮轴的一侧设置有膝关节轴承盖。
14、可选地,所述框架包括框架主体及座椅结构;
15、所述座椅结构设置在所述框架主体的上方。
16、可选地,所述框架主体包括上支撑板、下支撑板、左支架及右支架,所述上支撑板及下支撑板上下间隔,所述左支架连接所述上支撑板及下支撑板的左侧,所述右支架连接所述上支撑板及下支撑板的右侧;
17、所述座椅结构包括座板及连接在所述座板的后侧并向上延伸的靠背,所述上支撑板构成所述座板;
18、所述髋关节电机位于所述上支撑板与下支撑板之间。
19、可选地,所述大腿支架及小腿支架均为镂空的桁架结构。
20、可选地,左右两侧的所述机器腿组件左右对称设置。
21、可选地,所述轮足机器人还包括第三足,所述第三足在左右方向上位于左右两侧的所述机器腿组件之间;
22、所述第三足包括第三足转动关节电机、电动推杆、第三足驱动轮电机及第三足驱动轮轮胎;所述电动推杆的上端与所述第三足转动关节电机连接,所述电动推杆的下端与所述第三足驱动轮电机连接;
23、所述第三足转动关节电机安装在所述框架的后侧,用于驱动所述第三足相对所述框架旋转;
24、所述电动推杆,用于通过自身的上下伸缩运动调节所述第三足的长度;
25、所述第三足驱动轮电机,用于驱动所述第三足驱动轮轮胎旋转。
26、可选地,所述第三足还包括第三足安装支架、第三足转动关节轴承及第三足转动关节轴,所述第三足安装支架安装在所述框架上,所述第三足转动关节轴的两端固定在所述第三足安装支架上,所述第三足转动关节轴承安装在内圈压装在所述第三足转动关节轴上,所述第三足转动关节轴承安装在外圈压装在所述电动推杆的上端。
27、可选地,所述第三足还包括第三足驱动轮电机壳、连接件及第三足驱动轮轴,所述第三足驱动轮电机设置在所述第三足驱动轮电机壳内,所述电动推杆的下端通过所述连接件与所述第三足驱动轮电机壳连接,所述第三足驱动轮轴的一端与所述第三足驱动轮电机的输出轴连接,所述第三足驱动轮轴的另一端与所述第三足驱动轮轮胎连接。
28、可选地,所述第三足驱动轮电机双端输出,所述第三足驱动轮轮胎设置有两个,所述第三足驱动轮电机的每个输出轴均通过所述第三足驱动轮轴连接有一所述第三足驱动轮轮胎;
29、所述第三足还包括胀套,所述胀套安装在所述第三足驱动轮轴的穿出所述第三足驱动轮轮胎的端部,以限制所述第三足驱动轮轮胎的轴向位移。
30、可选地,所述轮足机器人还包括控制器及电源,所述控制器及电源固定在所述框架上,所述控制器分别连接所述髋关节电机、膝关节电机及主驱动轮电机,所述电源分别连接所述控制器、髋关节电机、膝关节电机及主驱动轮电机,以用于向所述控制器、髋关节电机、膝关节电机及主驱动轮电机供电。
31、本实用新型实施例的轮足机器人,髋关节电机安装在框架上,膝关节电机安装在大腿支架上,主驱动轮电机安装在小腿支架上。髋关节电机正转或反转,从而带动大腿支架、膝关节电机相对框架旋转,实现轮足机器人的下蹲和直立动作。主驱动轮电机正转或反转,从而带动主驱动轮轮胎相对小腿支架旋转,从而实现轮足机器人的前进和后退。膝关节电机正转或反转,从而带动小腿支架相对于大腿支架旋转,从而实现小腿支架的踢腿和收腿动作。相对于现有的双轮足混合自平衡机器人膝关节只设置了储能弹簧,上下楼梯只能以弹跳的方式进行,本实用新型实施例的轮足机器人,通过设置膝关节电机实现小腿支架的踢腿和收腿动作,模拟人类的小腿动作,实现很好的越障能力,轮足机器人上下楼梯更为轻松。
32、另外,本实用新型实施例的轮足机器人,通过两轮足的结构,结合轮式和足式的优势,实现轮式机器人越障能力、行驶速度和续航能力的提升。
33、髋关节电机固定在框架上,膝关节电机固定在大腿支架上,这样,膝关节电机的安装位置更为灵活,可以合理布置膝关节电机的安装位置,以简化安装结构,不占用框架内的安装空间。
34、另一方面,本实用新型实施例提供一种轮足移动终端,其包括上述的轮足机器人。
- 还没有人留言评论。精彩留言会获得点赞!