全向底盘结构及机器人的制作方法
本申请属于机器人底盘设计领域,更具体地说,是涉及一种全向底盘结构及机器人。
背景技术:
1、对于轮式机器人,底盘是整个系统的重要承载部件,用于安装电池、控制主板、传动系统等部件。
2、现有机器人对底盘的转弯比较重视,在机器人转动时,通常都是底盘与上部的机器人本体一体转动,而当遇到障碍物紧急转动时可能会使得机器人本体的突出部件与行人等发生碰撞。
技术实现思路
1、本申请实施例的目的在于提供一种全向底盘结构及机器人,以解决现有的轮式移动机器人在转动时通常都是底盘与上部的机器人本体一体转动,而当遇到障碍物紧急转动时可能会使得机器人本体的突出部件与行人等发生碰撞的问题。
2、为实现上述目的,本申请采用的技术方案是:提供一种全向底盘结构,包括:
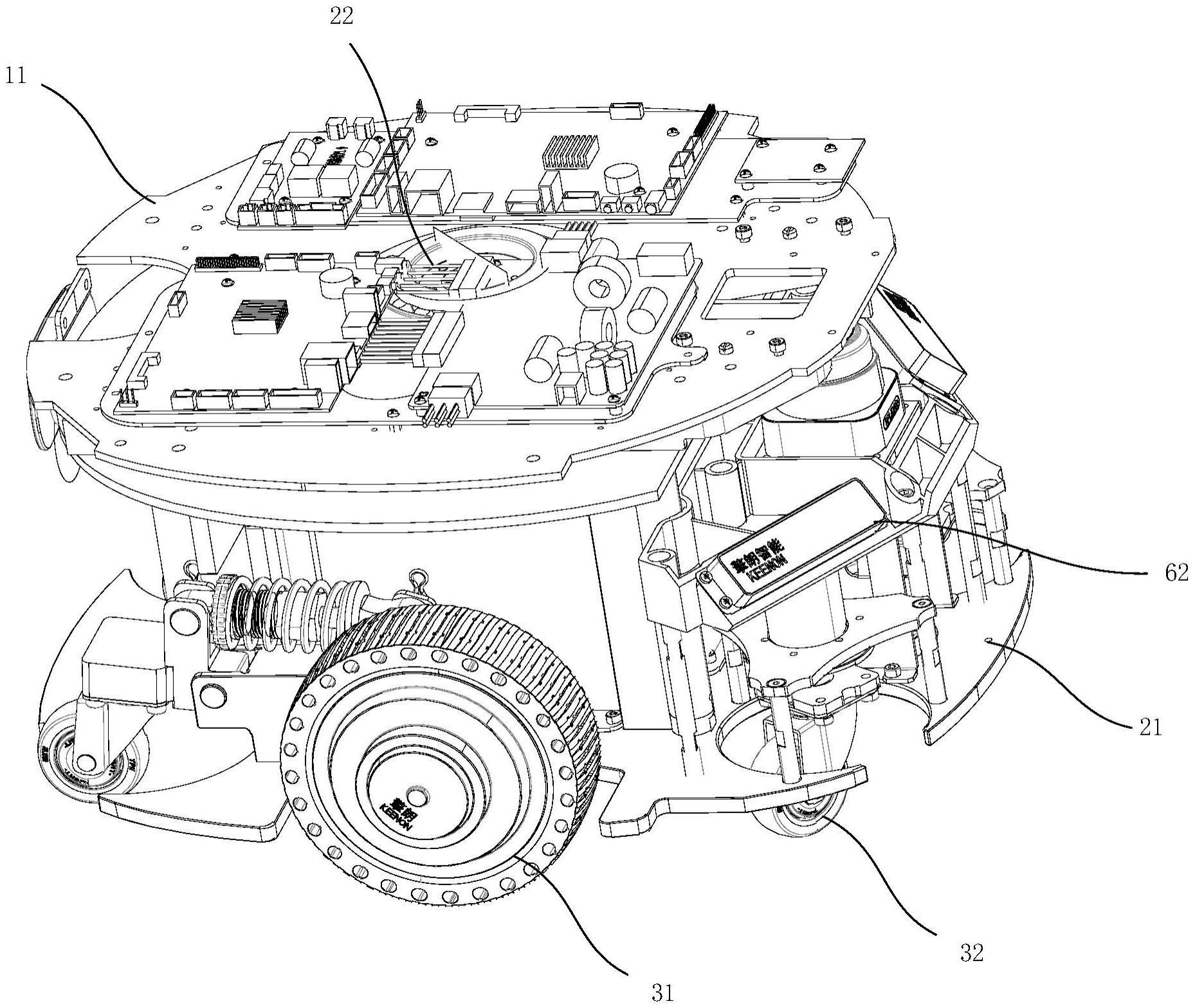
3、转动组件,包括承载件,所述承载件用于承载固定所述机器人主体;
4、底盘组件,包括底盘主体和驱动件,所述底盘主体设置在所述承载件背离所述机器人主体的一侧,所述驱动件设置在所述底盘主体上,用于驱动所述承载件相对所述底盘主体转动;
5、移动组件,设置在所述底盘主体上,所述移动组件带动所述底盘主体移动。
6、可选地,所述驱动件包括转动部和从动部,所述承载件设置在所述从动部上,所述转动部驱动所述从动部相对所述底盘主体转动。
7、可选地,所述底盘主体具有所述驱动件的一侧凸出设置有支撑平台,所述从动部和所述转动部转动设置在所述支撑平台上背离所述底盘主体的一侧。
8、可选地,所述转动部包括驱动马达和输出齿轮,所述驱动马达和所述输出齿轮在所述支撑平台两侧相对设置,且所述驱动马达带动所述输出齿轮转动;
9、所述从动部包括从动齿轮,所述输出齿轮与所述从动齿轮相互啮合;
10、所述支撑平台背离所述底盘主体的一侧设置有轴承件,所述从动齿轮套接安装在所述轴承件上,所述轴承件与所述底盘主体同轴设置。
11、可选地,还包括角度检测组件,所述角度检测组件对所述驱动件的转动角度进行检测。
12、可选地,还包括控制组件,所述控制组件分别与所述移动组件、所述驱动件和所述角度检测组件电连接;
13、所述控制组件根据所述角度检测组件所检测的角度控制所述移动组件调节所述底盘主体转动相应的角度。
14、可选地,所述移动组件包括设置在所述底盘主体行进方向两侧的驱动轮和设置在所述底盘主体周侧的多个万向轮,所述控制组件控制调节所述万向轮的朝向角度,且所述控制组件控制所述驱动轮的转动。
15、可选地,还包括识别组件,所述识别组件还包括第一识别件,所述第一识别件对所述机器人主体上侧的标号信息进行识别,以使所述控制组件控制所述移动组件调节所述底盘主体转动相应的角度。
16、可选地,所述识别组件还包括第二识别件,所述第二识别件设置在所述底盘主体行进方向的一侧,所述第二识别件对所述底盘主体行进方向一侧的障碍物进行识别探测。
17、一种机器人,包括机器人本体和上述的全向底盘结构,所述机器人主体设置在所述全向底盘结构中的承载件上,且所述机器人主体可与所述全向底盘结构中的底盘主体相对转动。
18、本申请提供的全向底盘结构的有益效果在于:与现有技术相比,本申请的全向底盘结构通过设置有通过驱动件驱动转动的承载件,承载件承载固定机器人主体,当需要进行转弯时,移动组件带动底盘主体朝向一侧转动,驱动件带动承载件以相同速度朝向另一侧转动,使得机器人主体的朝向始终保持一致,而仅有底盘主体的角度改变,从而使得机器人整体的底部转动而上部保持角度不变,避免在紧急转向时会碰撞到行人。
技术特征:
1.一种全向底盘结构,用于连接并支撑机器人主体,其特征在于,包括:
2.如权利要求1所述的全向底盘结构,其特征在于:所述驱动件包括转动部和从动部,所述承载件设置在所述从动部上,所述转动部驱动所述从动部相对所述底盘主体转动。
3.如权利要求2所述的全向底盘结构,其特征在于:所述底盘主体具有所述驱动件的一侧凸出设置有支撑平台,所述从动部和所述转动部转动设置在所述支撑平台上背离所述底盘主体的一侧。
4.如权利要求3所述的全向底盘结构,其特征在于:所述转动部包括驱动马达和输出齿轮,所述驱动马达和所述输出齿轮在所述支撑平台两侧相对设置,且所述驱动马达带动所述输出齿轮转动;
5.如权利要求1-4任一项所述的全向底盘结构,其特征在于:还包括角度检测组件,所述角度检测组件对所述驱动件的转动角度进行检测。
6.如权利要求5所述的全向底盘结构,其特征在于,还包括控制组件,所述控制组件分别与所述移动组件、所述驱动件和所述角度检测组件电连接;
7.如权利要求6所述的全向底盘结构,其特征在于:所述移动组件包括设置在所述底盘主体行进方向两侧的驱动轮和设置在所述底盘主体周侧的多个万向轮,所述控制组件控制调节所述万向轮的朝向角度,且所述控制组件控制所述驱动轮的转动。
8.如权利要求6所述的全向底盘结构,其特征在于:还包括识别组件,所述识别组件还包括第一识别件,所述第一识别件对所述机器人主体上侧的标号信息进行识别,以使所述控制组件控制所述移动组件调节所述底盘主体转动相应的角度。
9.如权利要求8所述的全向底盘结构,其特征在于:所述识别组件还包括第二识别件,所述第二识别件设置在所述底盘主体行进方向的一侧,所述第二识别件对所述底盘主体行进方向一侧的障碍物进行识别探测。
10.一种机器人,其特征在于:包括机器人主体和权利要求1-9任一项所述的全向底盘结构,所述机器人主体设置在所述全向底盘结构中的承载件上,且所述机器人主体可与所述全向底盘结构中的底盘主体相对转动。
技术总结
本申请提供了一种全向底盘结构及机器人,全向底盘结构包括转动组件,包括承载件,承载件用于承载固定机器人主体;底盘组件,包括底盘主体和驱动件,底盘主体设置在承载件背离机器人主体的一侧,驱动件设置在底盘主体上,用于驱动承载件相对底盘主体转动;移动组件,设置在底盘主体上,移动组件带动底盘主体移动。本申请提供的全向底盘结构,通过通过设置有通过驱动件驱动转动的承载件,承载件承载固定机器人主体,当需要进行转弯时,移动组件带动底盘主体朝向一侧转动,驱动件带动承载件以相同速度朝向另一侧转动,使得机器人主体的朝向始终保持一致,而仅有底盘主体的角度改变,避免在紧急转向时会碰撞到行人。
技术研发人员:马文成,李勋树,唐旋来,李通
受保护的技术使用者:上海擎朗智能科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!