马达辅助自行车的自动控制以实现骑乘者的期望骑乘目标的制作方法
本公开涉及马达辅助车辆,并且更具体地涉及马达辅助自行车的自动控制以实现骑乘者的期望骑乘目标。
背景技术:
1、马达辅助车辆是一种带有集成的马达或引擎以辅助车辆推进的机动车辆。电动自行车(“e-bike”)是一种类型的马达辅助自行车,其中推进辅助由集成的电动马达提供。电动自行车一般可以分为两类:1)辅助骑乘者的踏板动力的电动自行车,以及2)添加油门并因此集成了轻便摩托车风格的功能性的电动自行车。这两类电动自行车都保留了骑乘者人工踩踏的能力。
2、电动自行车的电动马达可以是轮毂马达,其位于电动自行车车轮的轮毂中以通过向车轮施加附加扭矩来提供推进。前轮毂马达连接到前轮并产生“拉”的感觉,而后轮毂马达连接到后轮并产生“推”的感觉。轮毂马达的替代品是中置驱动马达。中置驱动马达通常将动力驱动到位于曲柄组处的电动自行车的传动系,而不是位于其中一个车轮的轮毂中。通过直接为电动自行车的曲柄提供动力,中置驱动马达能够与电动自行车的现有齿轮组紧密协调工作,从而放大其提供的机械优势。
3、电动自行车的电动马达与电源(例如,可再充电电池)和传动系一起操作,以提供推进辅助。传动系是提供转动车辆车轮所必需的功率和扭矩的系统。在标准的非机动自行车上,传动系由曲柄组、链条和通常附接到后轮的某种齿轮系统组成。在一些情况下,传动系包括不同尺寸的齿轮和拨链器的集合,其被配置为机械地移动自行车链条穿过齿轮。在其它情况下,可以提供容纳齿轮装置的内部齿轮轮毂/变速器。
4、特定类型的内部齿轮轮毂是无级变速器(cvt),其没有固定的齿数比,而是在一系列传动/齿数比上提供几乎无限的换档。在示例配置中,行星cvt包括由惰轮支撑并围绕惰轮的中心轴线定位的旋转球的集合。球接触表示由踏板驱动的链轮的输入环和与待驱动的车轮对应的输出环。通过操纵移位器(shifter)(其可以在车把上提供)来调整球的倾斜角度,以使控制杆移动,从而使惰轮沿着其中心轴线移动。通过以这种方式调整球的倾斜轴线,调整cvt的传动比。在低速传动中,球具有使输入环比输出环旋转得更快的倾斜轴线,而在超速传动中,球的倾斜轴使输出环比输入环旋转得更快。而且,在一些配置中,球与输入环和输出环的滚动接触的高压使得在旋转球与输入环和输出环之间的微观空间之间通过的流体瞬间凝固,从而使得能够发生扭矩传递。
5、电动自行车的电动马达的传动比和扭矩输出可以通过骑乘者对电动自行车的直接输入来控制,例如使用开关、控制杆、旋钮、操纵杆等。骑乘者可能需要在整个骑乘过程中重复操作这些直接输入以获得期望的骑乘体验,这会变得很麻烦。
技术实现思路
1、公开了马达辅助车辆以及用于在骑乘期间自动且动态地确定马达辅助车辆的受控变量设置以支持骑乘者的期望骑乘目标的系统、方法和计算机可读介质。根据本文公开的技术的示例实施例,可以根据骑乘者指定的输入参数的集合来确定骑乘者的骑乘目标。输入参数可以指示例如骑乘者期望基于骑乘体验的骑乘目标、基于健身的骑乘目标或基于骑乘属性的骑乘目标。传感器信息可以从一个或多个板载传感器接收,并且可选地从远离马达辅助车辆的一个或多个传感器接收。传感器信息可以与输入变量的集合对应,其可以与车辆的操作特点和/或环境特点相关联。
2、然后可以使用基于目标的骑乘控制算法、传感器信息和输入参数的集合来动态地确定用于控制车辆的一个或多个操作组件的受控变量设置的集合。车辆的操作组件可以包括变速器、电动马达、制动系统、悬架系统等。受控变量设置可以包括传动比、对传动比的调整、马达辅助水平/马达扭矩输出、对马达辅助水平/马达扭矩输出的调整、制动力/制动调制、对制动力/制动调制的调整、悬架压力、对悬架压力的调整等。受控变量设置可以在骑乘期间自动且动态地确定,以尝试满足骑乘者指定的骑乘目标。以这种方式,骑乘者无需向马达辅助车辆提供直接输入来控制受控变量设置即可获得她的期望骑乘目标。
3、在示例实施例中,公开了一种马达辅助自行车的基于目标的骑乘控制的方法。该方法包括经由用户界面接收指示用户的期望骑乘体验的用户输入,该期望的骑乘体验与输入参数的集合相关联;接收指示马达辅助自行车的操作特点或环境特点中的至少一个的传感器信息;使用基于目标的骑乘控制算法、输入参数的集合和传感器信息来确定用于马达辅助自行车的一个或多个操作组件的受控变量设置的集合;以及基于受控设置的集合来控制马达辅助自行车的一个或多个操作组件,以支持用户的期望骑乘体验。
4、在示例实施例中,输入参数的集合包括骑乘体验参数、健身参数或骑乘属性参数中的至少一个。
5、在示例实施例中,骑乘体验参数指示用户期望为在起始位置和目的地位置之间的骑乘而花费的努力的水平。
6、在示例实施例中,健身参数包括用户在起始位置和目的地位置之间的骑乘的目标卡路里燃烧或针对骑乘的至少一部分的心率区之一。
7、在示例实施例中,骑乘属性参数包括马达辅助自行车的电池在到达目的地位置时的目标剩余电量。
8、在示例实施例中,受控变量设置的集合包括马达辅助自行车的传动比、对传动比的调整、马达辅助自行车的电动马达输出的扭矩或对扭矩输出的调整中的至少一个。
9、在示例实施例中,受控变量设置的集合包括马达辅助自行车的制动机构所施加的制动力、对制动力的调整、马达辅助自行车的悬架系统的悬架压力或对悬架压力的调整中的至少一个。
10、在示例实施例中,传感器信息包括指示马达辅助自行车的位置的位置信息、马达辅助自行车的位置处的海拔、马达辅助自行车的踏频速度、马达辅助自行车的速度、马达辅助自行车的电动马达的输出功率、电动马达的输入电流、施加到马达辅助自行车的制动机构的制动力或马达辅助自行车的悬架系统的悬架压力中的至少一个。
11、在示例实施例中,接收传感器信息包括从马达辅助自行车上的一个或多个传感器接收传感器信息。
12、在示例实施例中,使用基于目标的骑乘控制算法包括随时间监视传感器信息,基于监视到的传感器信息确定马达辅助自行车的操作模式,以及基于确定的马达辅助自行车的操作模式确定受控变量设置的集合。
13、在示例实施例中,确定马达辅助自行车的操作模式包括检测指示地形倾斜增加的特定传感器信息,该特定传感器信息包括马达辅助自行车在至少阈值时间段内的速度减小率、马达辅助自行车的位置和马达辅助自行车的行进方向的组合或马达辅助自行车后部的悬架行程的减小和马达辅助自行车前部的悬架行程的增加的组合中的至少一个。
14、在示例实施例中,基于确定的马达辅助自行车的操作模式来确定受控变量设置的集合包括将马达辅助自行车的传动比朝着完全低速驱动移位、增加马达辅助自行车的电动马达的扭矩输出、增加马达辅助自行车后部的马达辅助自行车的悬架系统的悬架压力或减小马达辅助自行车前部的马达辅助自行车的悬架系统的悬架压力中的一个或多个。
15、在示例实施例中,输入参数的集合包括骑乘体验参数,其指示用户期望为第一次骑乘花费的第一努力水平和用户期望为第二次骑乘花费的第二努力水平,第二努力水平大于第一努力水平,并且其中传动比朝着完全低速驱动的移位或电动马达的扭矩输出的增加中的至少一个对于第一次骑乘比对于第二次骑乘更大。
16、在示例实施例中,确定马达辅助自行车的操作模式包括检测指示紧急制动操作的特定传感器信息,该特定传感器信息包括制动压力在小于第一阈值时间段内增加超过阈值量、踏频速度在小于第二阈值时间段内降低超过阈值量或者马达辅助自行车后部的悬架行程的增加和马达辅助自行车前部的悬架行程的减小的组合中的至少一个。
17、在示例实施例中,基于确定的马达辅助自行车的操作模式来确定受控变量设置的集合包括停止对马达辅助自行车的变速器的供电、停止对马达辅助自行车的电动马达的供电、降低马达辅助自行车后部的马达辅助自行车的悬架系统的悬架压力、增加马达辅助自行车前部的马达辅助自行车的悬架系统的悬架压力或发起马达辅助自行车的自动制动操作中的一个或多个。
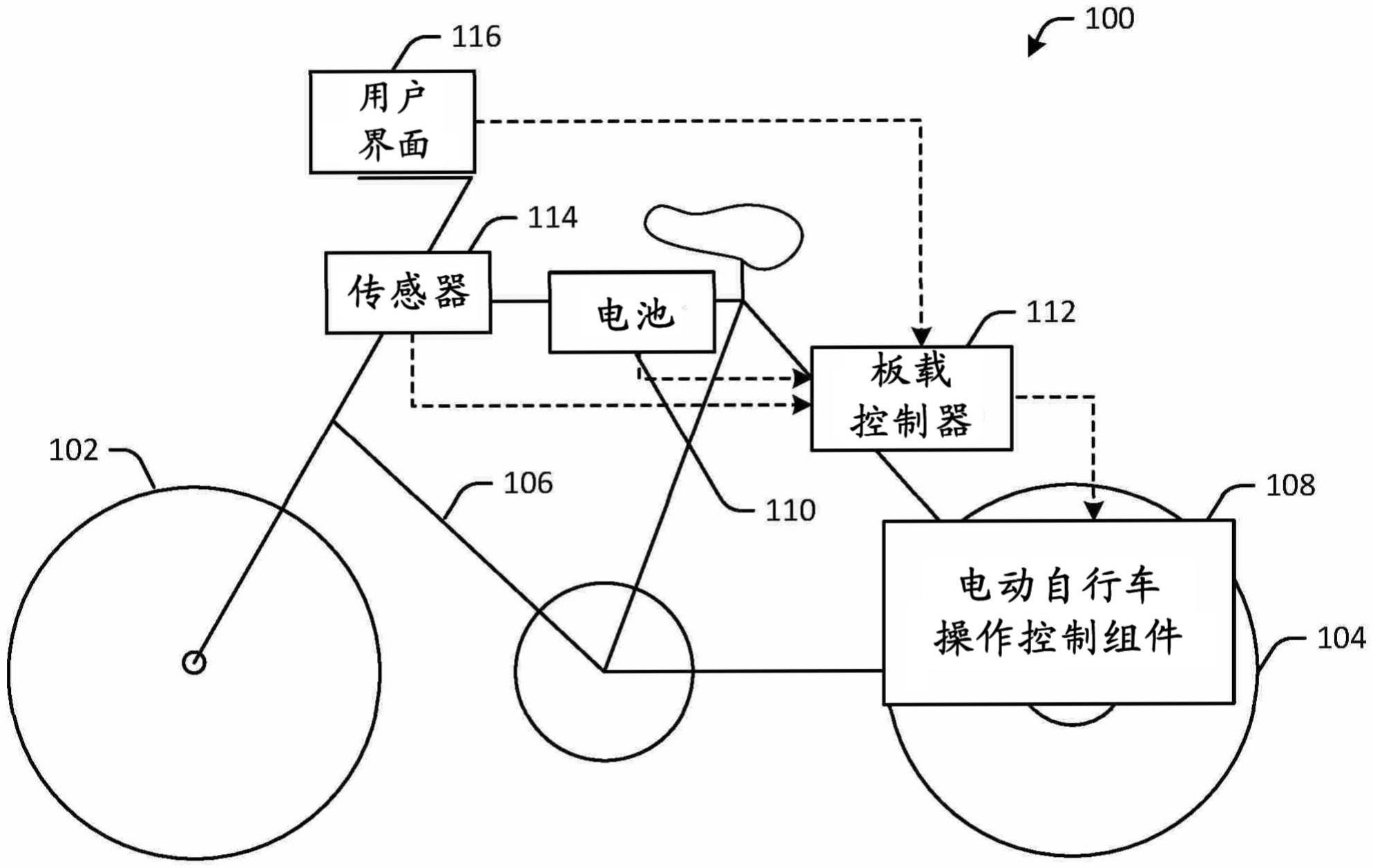
18、在示例实施例中,公开了一种马达辅助自行车。该马达辅助自行车包括框架、变速器、耦合到变速器的电动马达、用于向电动马达供电的电源、曲柄组、一个或多个传感器,以及通信地耦合到一个或多个传感器、变速器和电动马达的控制器。控制器包括存储可执行指令的存储器和被配置为访问该存储器并执行指令以执行操作集的处理器。操作集包括经由用户界面接收指示用户的期望骑乘体验的用户输入,该期望的骑乘体验与输入参数的集合相关联;从一个或多个传感器接收传感器信息,该传感器信息指示马达辅助自行车的操作特点或环境特点中的至少一个;使用基于目标的骑乘控制算法、输入参数的集合和传感器信息来确定用于马达辅助自行车的一个或多个操作组件的受控变量设置的集合;以及基于受控设置的集合来控制马达辅助自行车的一个或多个操作组件以支持用户的期望骑乘体验。
19、在示例实施例中,电源是电池,并且输入参数的集合包括到达目的地位置时电池的目标剩余电量,并且处理器被配置为执行控制电池的指令以减少供给电动马达的电力的量以便保存电池电量以满足目标剩余电量。
20、在示例实施例中,处理器被配置为通过执行指令来使用基于目标的骑乘控制算法,以随时间监视传感器信息、基于监视到的传感器信息确定马达辅助自行车的操作模式,并基于确定的马达辅助自行车的操作模式确定受控变量设置的集合。
21、在示例实施例中,受控变量设置的集合包括马达辅助自行车的传动比、对传动比的调整、电动马达输出的扭矩或对扭矩输出的调整中的至少一个。
22、在示例实施例中,马达辅助自行车还包括制动机构和悬架系统,并且受控变量设置的集合包括由制动机构施加的制动力、对制动力的调整、悬架系统的悬架压力或对悬架压力的调整中的至少一个。
23、在示例实施例中,公开了一种用于马达辅助自行车的基于目标的骑乘控制的非暂态计算机可读介质。非暂态计算机可读介质可由处理电路读取并且存储可由处理电路执行以使得方法被执行的指令。该方法包括经由用户界面接收指示用户的期望骑乘体验的用户输入,该期望的骑乘体验与输入参数的集合相关联;接收指示马达辅助自行车的操作特点或环境特点中的至少一个的传感器信息;使用基于目标的骑乘控制算法、输入参数的集合和传感器信息来确定用于马达辅助自行车的一个或多个操作组件的受控变量设置的集合;以及基于受控设置的集合来控制马达辅助自行车的一个或多个操作组件,以支持用户的期望骑乘体验。
24、任何上述方法、系统和/或非暂态计算机可读介质实施例都可以以任何方式组合以获得所公开技术的附加实施例。特别地,任何给定实施例的任何特征、组件、方面等可以与任何其它实施例的任何其它特征、组件、方面等组合以获得所公开技术的另一个实施例。
25、本文公开的系统、方法和非暂态计算机可读介质的这些和其它特征,以及结构的相关元件和零件的组合的操作方法和功能以及制造的经济性,将在参考附图考虑以下描述和所附权利要求后变得更加明显,所有附图构成本说明书的一部分,其中相同的附图标记表示各个附图中的对应部分。但是,应当明确地理解,附图仅用于说明和描述的目的并且不旨在作为本发明的限制的定义。
- 还没有人留言评论。精彩留言会获得点赞!