滚动机器人的制作方法
本发明涉及机器人,具体涉及一种滚动机器人。
背景技术:
1、滚动机器人是移动式机器人的一种,是自身为回转体结构,通过驱动源带动自身回转体滚动前进的机器人。在一些特殊的比较恶劣的环境下,一些传统轮式或足式机器人无法胜任工作。而滚动机器人由于本身结构上的特性,具有极大的灵活性、抗干扰性和抗倾倒性等特殊的优势,使之无论在沙地还是草地等不平整恶劣的路况下,都能够快速地运动。同时滚动机器人将内部机构和大部分传感器密封于球壳内部,对于外部的潮湿、灰尘等不利环境因素进行了很好的隔绝。密闭的结构也使得机器人具有一定的两栖能力。相较于足式机器人消耗能量在维持自身的姿态平衡上,滚动机器人只需通过驱动重摆改变机器人重心即可进行运动,滚动机器人能够节省许多能量,有很强的续航能力。滚动机器人两侧的挂载平台可以根据实际需要装载不同的传感器或人机交互设备,以此拓展其应用范围和应用领域。随着研究的深入,其在生活娱乐、工业农业、国防安全等领域将发挥越来越大的作用。但是,由于滚动机器人的动力学模型及运动学模型较为复杂,其具有非线性,耦合性和非链式等特点,使得滚动机器人的稳定运动控制成为难题。
2、传统基于重摆的滚动机器人设计思路是分别采用两个电机在两个正交的方向上(前后和左右)拉动重摆,让滚动机器人产生前后运动和转弯。但是由于重摆只有一个,前后运动和左右运动无法分开,这就导致在据此建立的运动学和动力学模型具有强耦合性,控制难度极高。同时,由于滚动机器人单点接触地面、容易晃动的运动特性,整个机体在前进的过程中翻滚角容易受到崎岖地面扰动,其变化将呈现周期性变化,且周期和前进速度呈正相关。这就导致低速下建立的模型在高速情况下并不适用,使模型愈发复杂,控制难度随速度的增大而直线上升。复杂的模型导致现有的滚动机器人都难以在高速运动中保持稳定。
3、重摆控制设计是一种常见的滚动机器人运动模式,具有执行机构简单的优势,但是在翻滚角稳定控制时,由于重摆的左右摆动和重摆在左右方向上稳定抬起一定角度都会对机体产生扭矩,而两种效应相互耦合,且重摆在左右方向上抬起一定角度会造成机体的倾斜,因此在控制时,通常只能无视重摆摆动造成的瞬间扭矩的影响,以及速度带来的机体翻滚角周期变化,降低前进速度和重摆摆动速度以获得可控制的简化模型。但是该模型由于经过了简化,因此不适用于高速情况,并且转向能力受到了限制。
4、进而,现有的滚动机器人存在以下问题:
5、1)回转体的壳体,如:球形、椭球形、横置的鼓型等,与地面形成点接触,是一种非稳态的结构。它既可以通过主动的改变翻滚角来转弯,也容易受到地面扰动或者转弯的离心力而产生晃动。在机器人速度越快时该晃动越难以控制。
6、2)滚动机器人通过拉动重摆来前后运动和转弯,但由于只有一个重摆,所以会形成耦合,在滚动机器人开始晃动后增加了控制难度。
技术实现思路
1、本发明的目的在于提供一种基于角动量守恒的复合控制驱动模式的滚动机器人,以解决滚动机器人稳定高速运动与灵活转向的控制问题。
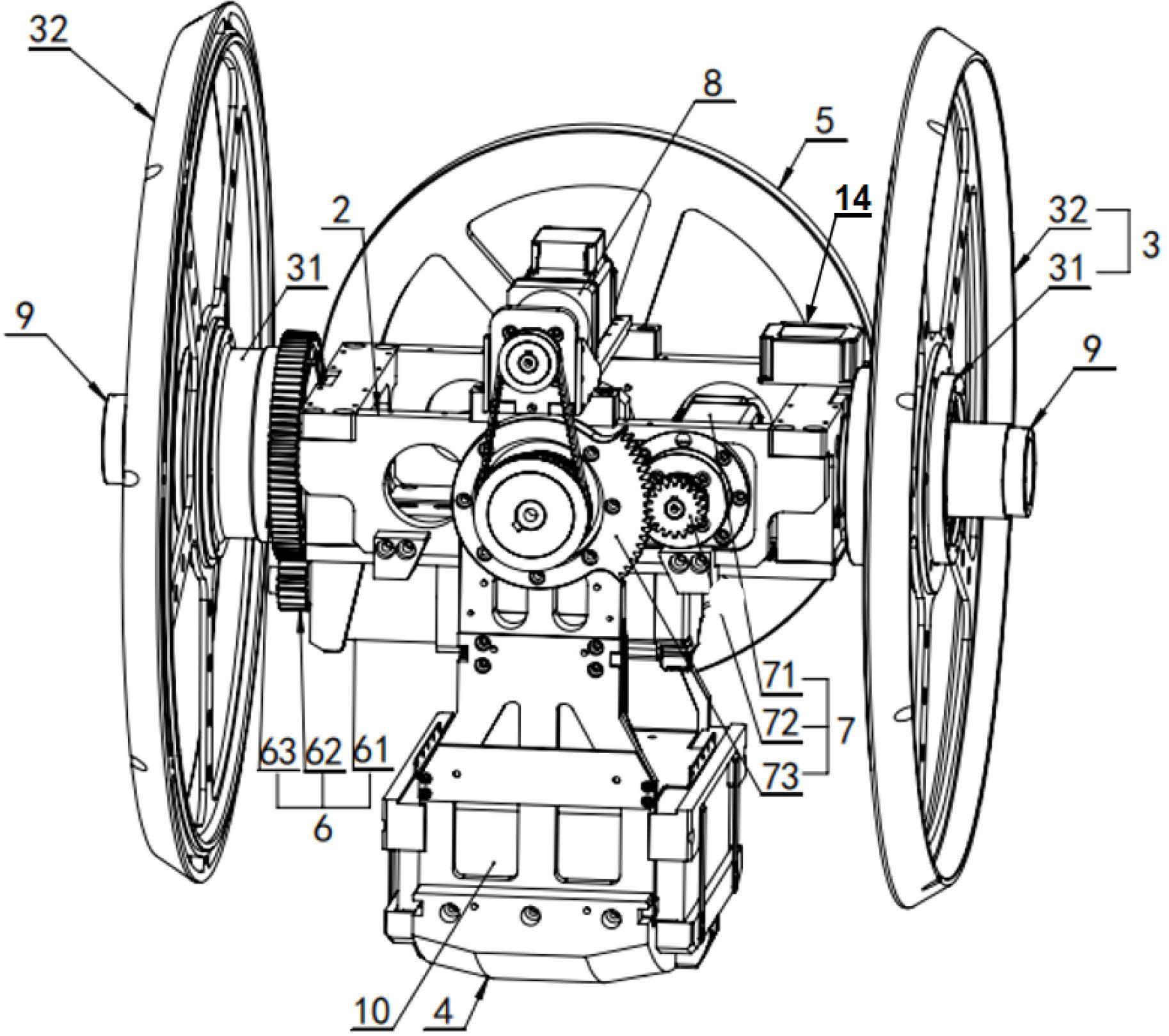
2、针对以上问题,根据本发明,提出了一种滚动机器人,包括:壳体,形成为回转体的形状,并且壳体的滚动面的外表面与旋转轴线的距离形成为从中间向两侧逐渐减小;两个支撑轮毂,固定到所述壳体两侧,所述支撑轮毂和所述壳体的外表面构成所述滚动机器人的滚动外形的一部分;主支撑结构件,在所述壳体内在左右方向上水平地延伸并在其两端通过轴承连接到所述两个支撑轮毂,使得所述壳体和所述两个支撑轮毂能够相对于所述主支撑结构件旋转;重摆,所述重摆通过在所述滚动机器人静止时在竖直方向上延伸的重摆支架连接到所述主支撑结构件,并相对于所述主支撑结构件在左右方向上可摆动;转动质量块,以在所述滚动机器人静止时在前后方向上水平地延伸的转动轴线可旋转地连接到所述主支撑结构件,所述前后方向垂直于所述左右方向和所述竖直方向;主驱动电机,配置为驱动所述主支撑结构件、所述重摆、所述转动质量块在前后方向上转动;重摆驱动电机,配置为驱动所述重摆相对于所述主支撑结构件在左右方向上摆动;以及转动质量块驱动电机,配置为驱动所述转动质量块相对于所述主支撑结构件在左右方向上转动。
3、根据本发明的滚动机器人可以具有以下中的一个或多个特征。
4、根据一个实施例,所述主驱动电机配置为通过改变所述主支撑结构件、所述重摆、所述转动质量块相对于壳体的角度,从而改变所述滚动机器人的质心的前后位置,使所述壳体获得前后滚动的力矩,实现所述滚动机器人的前后运动;所述重摆驱动电机配置为通过改变所述重摆相对于主支撑结构件和壳体的角度,从而改变所述滚动机器人的质心的左右位置,并且所述转动质量块驱动电机配置为通过使所述转动质量块正反加减速转动,对所述滚动机器人施加翻滚角方向的力矩,机器人的质心左右位置的改变和转动质量块正反加减速转动两者共同作用,改变机器人的翻滚角,实现对机器人的翻滚角姿态控制,实现所述滚动机器人的弧线转弯和直线运动的姿态稳定控制。
5、根据一个实施例,所述转动质量块的形状关于所述转动轴线旋转对称,并且其中,与所述转动质量块更靠近所述转动轴线的部分相比,更多的质量分布在更远离所述转动轴线的部分。
6、根据一个实施例,所述转动质量块形成为刚性轮的形式,具有布置在外周的圆环和将圆环连接到所述转动轴线的多个辐条。
7、根据一个实施例,所述转动质量块的外切球半径是所述壳体的外切球半径的30%-80%。
8、根据一个实施例,所述转动质量块的安装轴在所述壳体的中轴面上,安装高度在所述滚动机器人的总高度的30%-70%,所述安装轴限定所述转动轴线。
9、根据一个实施例,所述转动质量块由模具钢制成。
10、根据一个实施例,所述重摆下端邻近所述壳体内壁的底面设置。
11、根据一个实施例,所述重摆的质量为所述滚动机器人的总质量的30%以上,所述转动质量块的质量为所述滚动机器人的总质量的5%以上。
12、根据一个实施例,滚动机器人还包括为所述主驱动电机、所述重摆驱动电机、所述转动质量块驱动电机供电的电源模块,所述电源模块嵌于所述重摆上,作为所述重摆的一部分。
13、根据一个实施例,滚动机器人还包括外挂仓,所述外挂仓在所述支撑轮毂的外侧固定到所述主支撑结构件,所述外挂仓包括外挂板和固定到外挂板的护罩,所述护罩与所述支撑轮毂和所述壳体的外表面构成所述滚动机器人的滚动外形,所述外挂仓设置有外挂传感器,所述外挂传感器选自以下中的一个或多个:gps定位模块、六轴陀螺姿态传感器模块、轮速计、相机、激光雷达、毫米波雷达,所述壳体内设置有内置传感器,所述内置传感器选自以下中的一个或多个:gps定位模块、六轴陀螺姿态传感器模块、轮速计。
14、根据一个实施例,所述壳体为左右对称结构,并且,所述壳体形成为以下形状或以下形状的一部分:球形、椭球形、横置的鼓型。
15、与现有技术相比,本发明的有益效果包括但不限于:
16、1、本发明通过转动质量块驱动电机驱动的转动质量块作为力矩的输入,利用角动量守恒对滚动机器人施加翻滚角方向的力矩,使滚动机器人获得相对于惯性系的向心加速度。在原有机器人通过改变所述重摆相对于主支撑结构件和壳体的角度,从而改变所述滚动机器人的质心的左右位置进而改变翻滚角的控制方法上,增加了一个控制手段,两者共同影响翻滚角。且转动质量块对滚动机器人施加的影响十分单一且迅速,可以实现在动力学模型及运动学模型上的解耦化和线性化控制,大大降低了这类机器人的控制难度。同时由于转动质量块对抑制高频噪声的优越性,使得滚动机器人可以突破原本的速度限制,速度上限提高4倍以上,达到接近30公里每小时的速度,并且几乎不出现翻滚角的抖动。
17、2、本发明利用六轴陀螺姿态传感器获取的原始数据对滚动机器人姿态进行更新,将转动质量块的驱动和重摆利用前后、左右摆动来改变整体的质心位置的驱动的方式相结合,通过控制算法以控制滚动机器人的姿态,使得滚动机器人实现不抖动的高速直线运动。
18、3、本发明同时还通过各驱动电机相互协调工作驱动壳体以不同的方式进行运动,通过同时调节转动质量块的转速和重摆抬起的高度可以实现滚动机器人短暂原地旋转或实现滚动机器人的稳定弧线转弯。
- 还没有人留言评论。精彩留言会获得点赞!