一种四足机器人及脊椎-腿足耦合驱动方法
本发明涉及仿生机器人,特别是涉及一种四足机器人及脊椎-腿足耦合驱动方法。
背景技术:
1、四足机器人由于自身可以灵活规划落脚支撑点,相较于轮式或履带式机器人它们能提供更好的环境适应性,因而被广泛应用于野外探测、复杂场景巡检等领域。
2、自然界中的四足动物拥有卓越的跑跳运动能力,这归功于他们在运动时全身肌肉与骨骼关节的协调匹配,尤其是脊柱和腿部的动态协调匹配。然而现有的四足机器人的脊柱通常为刚性脊柱或被动脊柱,并不同时具备俯仰与收缩伸展两种动物脊柱的基础运动,这使得四足机器人在实际运行过程中由于欠缺主动脊柱运动产生运动僵硬,灵活性下降等问题,进而掣肘了四足机器人的运动速度、能量效率等关键指标的提升。
3、现有的主动脊柱有哈尔滨工业大学发明的一种多关节脊柱及脊柱型四足机器人(cn109940586a),该发明公开了一种多关节脊柱,包括依次铰接的第一脊骨、第二脊骨与第三脊骨,所述第一脊骨与所述第三脊骨分别用于安装机器人下肢,所述第一脊骨连接有用于驱动其绕铰接轴旋转的第一驱动单元,所述第三脊骨连接有用于驱动其绕铰接轴旋转的第二驱动单元,所述第一驱动单元与所述第二驱动单元分别安装于所述第二脊骨上;
4、然而其仅仅具备俯仰功能,四足动物在跳跃时会伴随着脊柱的伸缩,这个问题并没有被现有技术公开,基于此,急需一种新型的方案来解决上述问题。
技术实现思路
1、本发明的目的是提供一种四足机器人及脊椎-腿足耦合驱动方法,以解决上述现有技术存在的问题,更加真实地模拟四足动物的奔跑姿态,以提高移动速度以及能量效率。
2、为实现上述目的,本发明提供了如下方案:
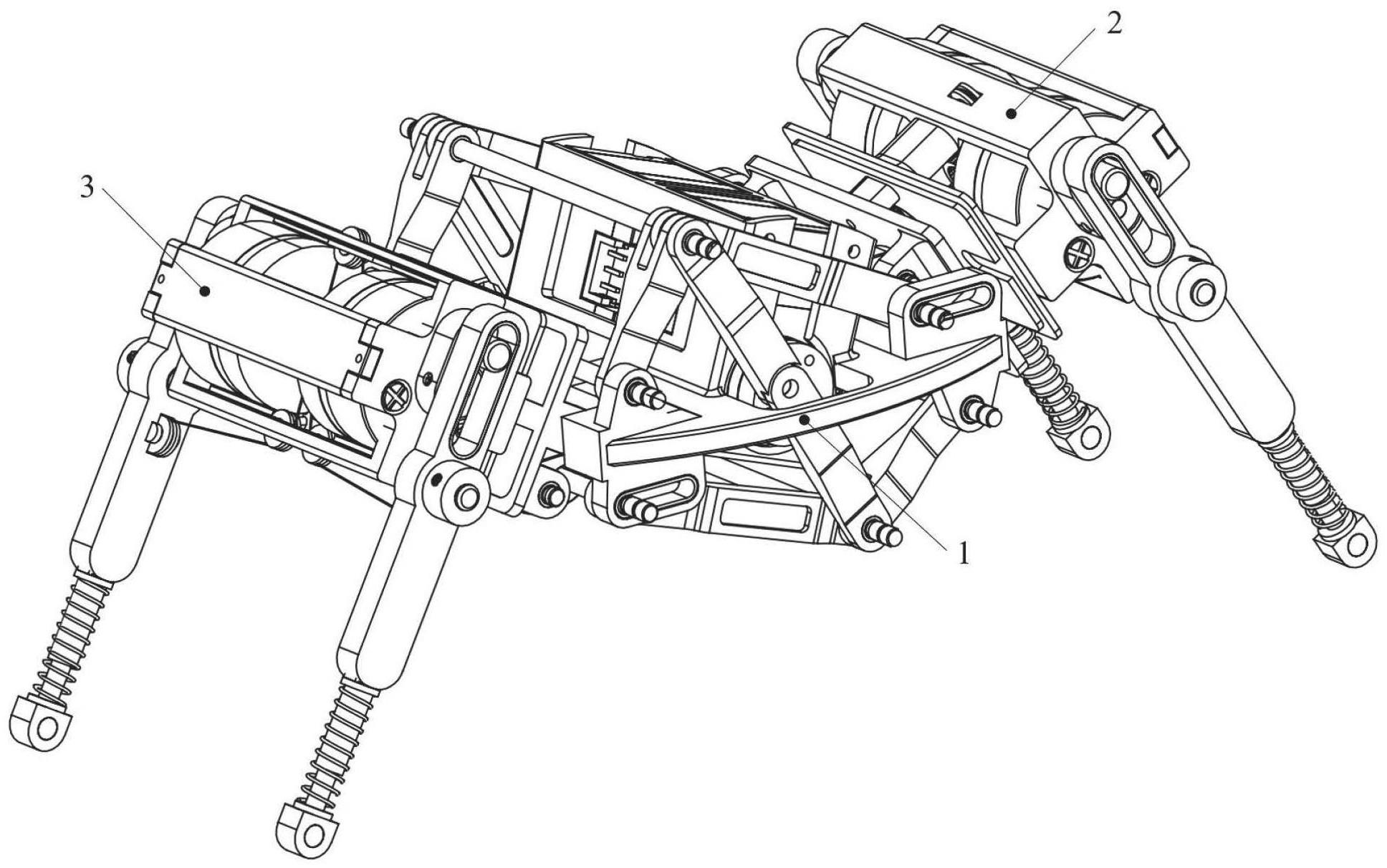
3、本发明提供一种四足机器人,包括主动脊柱和两个肢体,两个所述肢体分别为前肢和后肢,两个所述肢体分别能够俯仰且沿着前后方向能够伸缩地设置于所述主动脊柱的两端,所述主动脊柱能够驱动所述肢体俯仰以及伸缩。
4、优选的,所述主动脊柱包括脊柱安装架、两个所述摆动输出件和俯仰驱动电机,两个摆动输出件能够俯仰地安装于所述脊柱安装架的前后两端,所述肢体沿远离和靠近所述摆动输出件的方向能够移动地设置于所述摆动输出件上,所述俯仰驱动电机固定设置于所述脊柱安装架内并能够驱动所述摆动输出件俯仰,所述摆动输出件能够带动所述肢体俯仰。
5、优选的,所述摆动输出件的中部铰接于所述脊柱安装架上并形成一个固定转动副,所述脊柱安装架上设置有滑槽,所述摆动输出件通过滑动轴与所述滑槽形成一个活动转动副,所述滑动轴移动至所述滑槽的端部时即为所述摆动输出件俯仰的极限角度,所述俯仰驱动电机能够驱动所述滑动轴在所述滑槽中移动以实现所述摆动输出件俯仰。
6、优选的,所述俯仰驱动电机的输出轴上固定设置有脊柱驱动轮,所述脊柱驱动轮上偏心设置有安装部,所述俯仰驱动电机分别通过第一多连杆机构和第二多连杆机构驱动两个所述摆动输出件做俯仰运动,所述第一多连杆机构和所述第二多连杆机构的一端均固定连接于所述安装部上,另一端分别铰接于两个所述滑动轴上,所述第一多连杆机构和所述第二多连杆机构关于一点中心对称,所述俯仰驱动电机驱动所述脊柱驱动轮单向转动即实现所述摆动输出件往复摆动,所述第一多连杆机构和所述第二多连杆机构为二连杆机构,所述二连杆机构中两个连杆通过三杆连接轴连接,所述三杆连接轴上还铰接有一个曲柄杆,所述曲柄杆远离所述三杆连接轴的一端与所述脊柱安装架铰接。
7、优选的,所述脊柱安装架的结构关于第一平面平面对称,所述第一平面为所述脊柱安装架宽度方向上的中心平面,所述俯仰驱动电机为双轴驱动电机,所述俯仰驱动电机安装于所述脊柱安装架的中部且两个输出轴分别与所述脊柱安装架两侧的所述脊柱驱动轮固定连接。
8、优选的,所述主动脊柱还包括两个伸缩驱动电机,两个所述伸缩驱动电机分别对应于两个肢体,所述伸缩驱动电机固定设置于所述摆动输出件上或所述脊柱安装架的端部,所述肢体上设置有螺纹孔,所述伸缩驱动电机的输出轴上连接有丝杆,所述丝杆螺纹连接于所述螺纹孔中,所述伸缩驱动电机通过驱动所述丝杆向不同的方向旋转进而实现所述肢体的伸缩;
9、所述伸缩驱动电机固定设置于所述脊柱安装架的端部时,所述伸缩驱动电机的输出轴通过一个万向节与所述丝杆进行传动连接。
10、优选的,每个所述肢体的下方设置有多个弹性腿,所述主动脊柱包括弹性腿收缩驱动装置,所述弹性腿收缩驱动装置能够驱动所述弹性腿压缩蓄能,并能够结束压缩状态使所述弹性腿放能实现弹跳。
11、优选的,所述弹性腿收缩驱动装置包括拉绳、卷线筒和所述丝杆,所述卷线筒上绕设有两股拉绳,两股所述拉绳对应于两个所述弹性腿,所述拉绳的自由端固定连接于所述弹性腿的末端,所述卷线筒同轴安装于所述丝杆的末端,所述伸缩驱动电机驱动所述丝杆转动时带动所述卷线筒正反转,所述肢体上设置有导向滑轮来对所述拉绳进行导向。
12、优选的,所述肢体包括肢体安装架、两个弹性腿摆动驱动电机、两个驱动曲柄和两个弹性腿旋转轴,所述肢体安装架上设置有两个滑道,所述摆动输出件上设置有两个柱状的滑柱,所述滑柱与所述滑道形成移动副,两个所述弹性腿摆动驱动电机布置在肢体安装架内部两侧,两个所述弹性腿摆动驱动电机之间留有卷线筒的工作空间,所述弹性腿旋转轴固定安装于肢体安装架下侧,所述弹性腿转动连接于所述弹性腿旋转轴上,弹性腿摆动驱动电机输出轴固定连接到驱动曲柄第一端,驱动曲柄第二端凸起的圆柱体与弹性腿上侧的滑槽形成移动转动副,驱动曲柄单向转动能够使得弹性腿绕弹性腿旋转轴进行周期性往复转动。
13、本发明还提供了一种如上所述的四足机器人的脊椎-腿足耦合驱动方法,包括:
14、所述四足机器人中在每个所述肢体的下方设置有多个弹性腿,所述主动脊柱包括弹性腿收缩驱动装置,所述弹性腿收缩驱动装置能够驱动所述弹性腿压缩蓄能,并能够结束收缩状态使所述弹性腿放能实现弹跳;
15、通过耦合控制所述摆动输出件的摆动状态、所述肢体的伸缩状态和所述弹性腿的蓄放能状态来模拟四足动物奔跑时脊柱俯仰、收缩和腿部的蓄放能状态。
16、本发明相对于现有技术取得了以下技术效果:
17、本发明提供的四足机器人的脊柱能够俯仰、伸缩,以更加真实地模拟四足动物的奔跑姿态,进而提高移动速度以及能量效率。
技术特征:
1.一种四足机器人,其特征在于:包括主动脊柱和两个肢体,两个所述肢体分别为前肢和后肢,两个所述肢体分别能够俯仰且沿着前后方向能够伸缩地设置于所述主动脊柱的两端,所述主动脊柱能够驱动所述肢体俯仰以及伸缩。
2.根据权利要求1所述的四足机器人,其特征在于:所述主动脊柱包括脊柱安装架、两个摆动输出件和俯仰驱动电机,两个所述摆动输出件能够俯仰地安装于所述脊柱安装架的前后两端,所述肢体沿远离和靠近所述摆动输出件的方向能够移动地设置于所述摆动输出件上,所述俯仰驱动电机固定设置于所述脊柱安装架内并能够驱动所述摆动输出件俯仰,所述摆动输出件能够带动所述肢体俯仰。
3.根据权利要求2所述的四足机器人,其特征在于:所述摆动输出件的中部铰接于所述脊柱安装架上并形成一个固定转动副,所述脊柱安装架上设置有滑槽,所述摆动输出件通过滑动轴与所述滑槽形成一个活动转动副,所述滑动轴移动至所述滑槽的端部时即为所述摆动输出件俯仰的极限角度,所述俯仰驱动电机能够驱动所述滑动轴在所述滑槽中移动以实现所述摆动输出件俯仰。
4.根据权利要求3所述的四足机器人,其特征在于:所述俯仰驱动电机的输出轴上固定设置有脊柱驱动轮,所述脊柱驱动轮上偏心设置有安装部,所述俯仰驱动电机分别通过第一多连杆机构和第二多连杆机构驱动两个所述摆动输出件做俯仰运动,所述第一多连杆机构和所述第二多连杆机构的一端均固定连接于所述安装部上,另一端分别铰接于两个所述滑动轴上,所述第一多连杆机构和所述第二多连杆机构关于一点中心对称,所述俯仰驱动电机驱动所述脊柱驱动轮单向转动即实现所述摆动输出件往复摆动,所述第一多连杆机构和所述第二多连杆机构为二连杆机构,所述二连杆机构中两个连杆通过三杆连接轴连接,所述三杆连接轴上还铰接有一个曲柄杆,所述曲柄杆远离所述三杆连接轴的一端与所述脊柱安装架铰接。
5.根据权利要求4所述的四足机器人,其特征在于:所述脊柱安装架的结构关于第一平面平面对称,所述第一平面为所述脊柱安装架宽度方向上的中心平面,所述俯仰驱动电机为双轴驱动电机,所述俯仰驱动电机安装于所述脊柱安装架的中部且两个输出轴分别与所述脊柱安装架两侧的所述脊柱驱动轮固定连接。
6.根据权利要求3所述的四足机器人,其特征在于:所述主动脊柱还包括两个伸缩驱动电机,两个所述伸缩驱动电机分别对应于两个肢体,所述伸缩驱动电机固定设置于所述摆动输出件上或所述脊柱安装架的端部,所述肢体上设置有螺纹孔,所述伸缩驱动电机的输出轴上连接有丝杆,所述丝杆螺纹连接于所述螺纹孔中,所述伸缩驱动电机通过驱动所述丝杆向不同的方向旋转进而实现所述肢体的伸缩;
7.根据权利要求6所述的四足机器人,其特征在于:每个所述肢体的下方设置有多个弹性腿,所述主动脊柱包括弹性腿收缩驱动装置,所述弹性腿收缩驱动装置能够驱动所述弹性腿压缩蓄能,并能够结束压缩状态使所述弹性腿放能实现弹跳。
8.根据权利要求7所述的四足机器人,其特征在于:所述弹性腿收缩驱动装置包括拉绳、卷线筒和所述丝杆,所述卷线筒上绕设有两股拉绳,两股所述拉绳对应于两个所述弹性腿,所述拉绳的自由端固定连接于所述弹性腿的末端,所述卷线筒同轴安装于所述丝杆的末端,所述伸缩驱动电机驱动所述丝杆转动时带动所述卷线筒正反转,所述肢体上设置有导向滑轮来对所述拉绳进行导向。
9.根据权利要求7所述的四足机器人,其特征在于:所述肢体包括肢体安装架、两个弹性腿摆动驱动电机、两个驱动曲柄和两个弹性腿旋转轴,所述肢体安装架上设置有两个滑道,所述摆动输出件上设置有两个柱状的滑柱,所述滑柱与所述滑道形成移动副,两个所述弹性腿摆动驱动电机布置在肢体安装架内部两侧,两个所述弹性腿摆动驱动电机之间留有卷线筒的工作空间,所述弹性腿旋转轴固定安装于肢体安装架下侧,所述弹性腿转动连接于所述弹性腿旋转轴上,弹性腿摆动驱动电机输出轴固定连接到驱动曲柄第一端,驱动曲柄第二端凸起的圆柱体与弹性腿上侧的滑槽形成移动转动副,驱动曲柄单向转动能够使得弹性腿绕弹性腿旋转轴进行周期性往复转动。
10.一种权利要求1~9任意一项所述的四足机器人的脊椎-腿足耦合驱动方法,其特征在于:包括:
技术总结
本发明提供一种四足机器人及脊椎‑腿足耦合驱动方法,涉及仿生机器人技术领域,包括主动脊柱和两个肢体,两个肢体分别为前肢和后肢,两个肢体分别能够俯仰且沿着前后方向能够伸缩地设置于主动脊柱的两端,主动脊柱能够驱动肢体俯仰以及伸缩。脊椎‑腿足耦合驱动方法通过耦合控制摆动输出件的摆动状态、肢体的伸缩状态和弹性腿的蓄放能状态来模拟四足动物奔跑时脊柱俯仰、收缩和腿部的蓄放能状态。本发明提供的方案能够更加真实地模拟四足动物的奔跑姿态,以提高移动速度以及能量效率。
技术研发人员:石青,王若超,肖航,权小龙,杜鎔杰,高俊辉
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!