球形滚跳机器人及其应用
:本发明涉及微型机器人制造,具体的说是一种能够实现滚动、转弯、跳跃等多种运动状态,并适于多个体间组织分布式架构,对复杂环境数据进行采集、决策、执行的球形滚跳机器人及其应用。
背景技术
0、
背景技术:
1、随着经济社会和物质条件的进一步发展,人口预期寿命不断延长,对社会医疗需求不断增加。医院环境具备服务目标多、医疗辅助任务量大、高卫生需求等条件,传统以医护人员为主的医疗辅助任务占用大量医护资源,并且医护人员面临着被传染的医疗风险,难以保证自身安全性,所以研究开发一种任务适应性强、工作可靠的医疗辅助智能机器人迫在眉睫,以应对环境动态化、长时限、序列化、多任务类型的复杂医疗辅助任务,如医疗导诊、卫生消毒、医疗护理等任务。
技术实现思路
0、
技术实现要素:
1、本发明针对现有技术的需求,提出了一种能够实现滚动、转弯、跳跃等多种运动状态,并适于多个体间组织分布式架构,对复杂环境数据进行采集、决策、执行的球形滚跳机器人及其应用。
2、本发明通过以下措施达到:
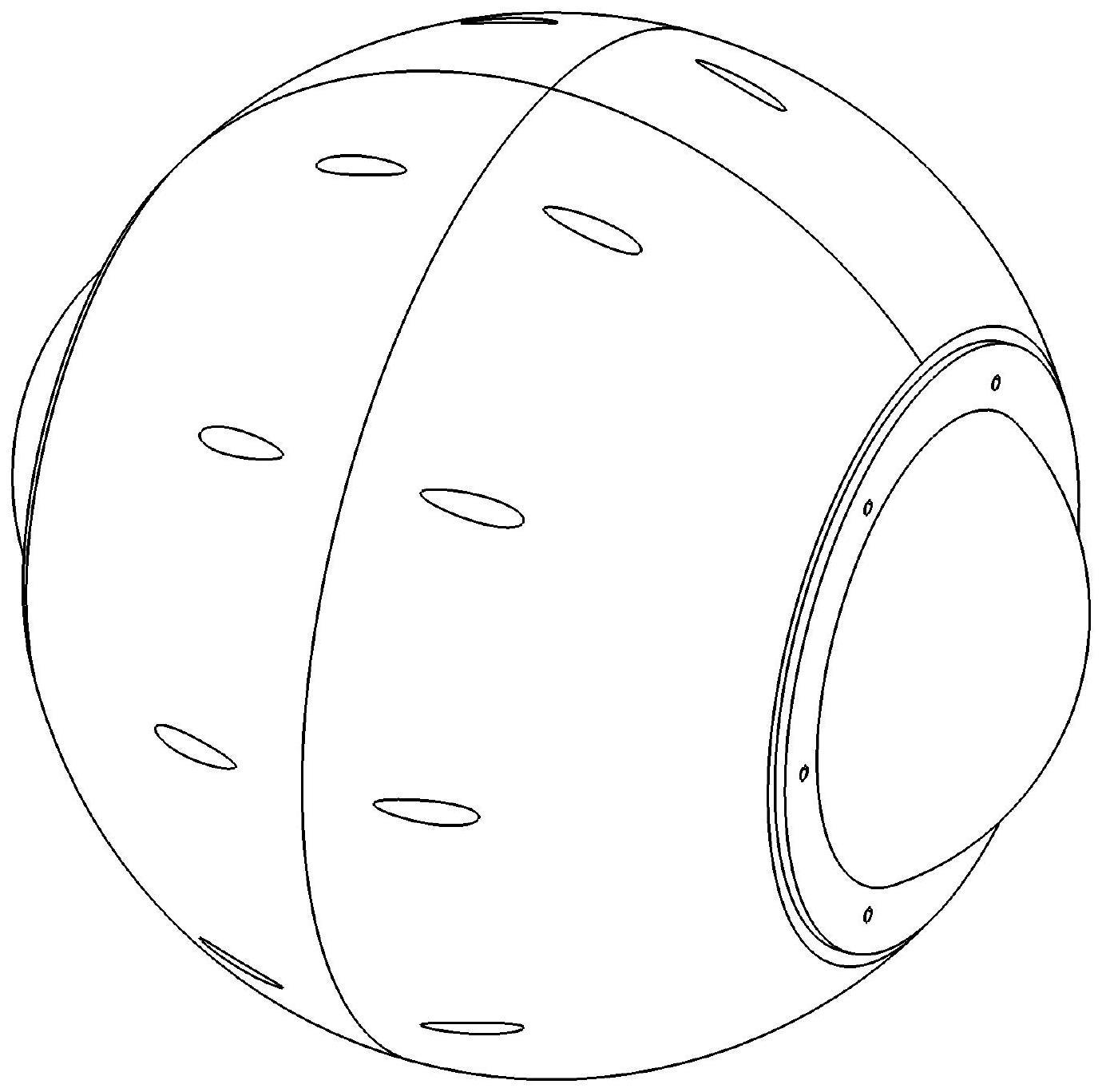
3、一种球形滚跳机器人,设有球形壳体,球形壳体内设有运动组件,其特征在于,所述球形壳体由对称设置的左半球形外壳和右半球形外壳组成,球形壳体内沿壳体中轴线设置中轴,中轴的两端分别设有用于支撑固定中轴的支撑部件,中轴的中央处经黄铜轴套连接电气控制组件,黄铜轴套经顶丝固定在中轴的中央处,电气控制组件与黄铜轴套可绕中轴的轴线转动,但不能与中轴发生轴向或径向相对移动;中轴上对应电气控制组件两侧对称设置左侧重摆机构和右侧重摆机构,所述左侧重摆机构和右侧重摆机构分别设有固定限位环、重摆、减速组件、电动机、蓄电池,其中重摆经固定限位环固定在中轴上,重摆的内侧设有减速组件,电动机与减速组件相连,电动机固定在重摆下侧,蓄电池为电动机提供能量并固定在电动机的上侧,电动机的控制信号输入端与电气控制组件相连,电动机的输出经减速组件进行减速;中轴的两端还对称设有左侧摄像组件和右侧摄像组件,所述左侧摄像组件与右侧摄像组件分别与蓄电池和电气控制组件电连接;所述球形壳体对应左侧摄像组件和右侧摄像组件的安装区域分别设有摄像头罩。
4、本发明所述减速组件采用同步带机构实现,所述同步带机构包括大同步带轮、小同步带轮以及同步带,大同步带轮的外侧经平面止推轴承与重摆紧贴,大同步带轮的内侧经法兰轴座与中轴固定连接,以保证大同步带轮在轴向与径向相对中轴无相对位移。
5、本发明所述中轴的中央处设有导电滑环,用于连接中轴两侧的摄像头以及电气控制组件,所述电气控制组件包括设置在控制电路板上的嵌入式处理器、降压电路、语音输入/输出电路、惯性测量电路以及微控制器,其中嵌入式处理器分别与语音输入/输出电路以及摄像头相连,微控制器分别与嵌入式处理器、惯性测量电路、降压电路以及电动机相连,电动机在微控制器的控制下,通过同步带驱动重摆的偏心质量块绕主轴做旋转运动。
6、本发明中将电动机、电池作为重摆的一部分,减少重摆配重块的数量,有效降低了机器人自身重量。
7、本发明还提出了一种如上所述球形滚跳机器人的应用,其特征在于,所述球形滚跳机器人具有滚动、跳跃、转弯三种运动模式,在电气控制组件的控制下,电动机通过同步带驱动偏心质量块绕主轴一维旋转运动,当电动机带动左右两个重摆以相同的方向运动时,机器人因重摆质心向前偏移带动整个机器人向前滚动;当两个重摆以相反的方向运动时,其同时的向上运动会对其产生一个围绕轴线的扭矩,驱动球绕自身轴线发生转动,实现球的转向运动;当两个重摆以相反的方向快速运动到某一角度并瞬间停止,由于重摆快速运动产生的惯性力带动机器人向上运动,完成跳跃运动。
8、本发明所述球形滚跳机器人的应用还包括通过两侧的摄像组件采集工作场景的环境信息,电气控制组件通过对传回的实时信息处理转换,构建出工作场景的环境地图,判断障碍物所处的位置,同时通过自身惯性传感器模块的信息对机器人自身进行实时运动状态解算,进而规划出机器人运动的最佳路线。
9、本发明所述球形滚跳机器人的应用还包括将任意两个或两个以上的球形滚跳机器人联合使用,通过个体之间相互传达任务进度以及所采集环境数据,以便周围的机器人快速做出反应,以应对环境中复杂多变、动态性强的辅助任务。
10、本发明所述球形滚跳机器人的应用为作为辅助医疗球形滚跳机器人来完成导诊、远程医疗、巡检、消毒、体征检测等任务,通过机器人两侧安装的摄像头扫描患者的身份码可以快速获取患者既往病史并发送给主治医生,对于住院患者,机器人可以通过摄像头实时监测病人体征数据,需要时联系主治医生对患者远程诊断。
11、本发明所述辅助医疗球形滚跳机器人主体由一组对称半球体外壳与中心支撑件组成,其外形呈圆球形外包络状态,其内部具备运动传动系统、电力管理系统、视听感知系统、中央决策系统等组件。其中运动传动系统为整个球形辅助医疗智能装备提供运动基础,其功能包括滚动、转向、跳跃等多种运动模式;电力管理系统为整个球形辅助医疗智能装备提供运动、检测所需的能量;视听感知系统包括视频采集及传输系统以及语音交互系统,视频采集及传输系统可接受外部视频信息,实现视频信息传输分析,语音交互系统具备语音输入输出能力,可实现与用户的音频信息交互;中央决策系统用于实现不同环境下的运动决策及视觉信息处理。
12、本发明中辅助医疗球形滚跳机器人具有滚动、转弯、跳跃三种运动模式,在内部中央控制器指令下,电机通过同步带驱动偏心质量块绕主轴做旋转运动,当电机带动左右两个重摆以相同的方向运动时,机器人因重摆向前偏移使得整体质心向前偏移,从而带动整个机器人向前滚动,如图1所示;当两个重摆以相反的方向运动时,其同时的向上运动会对其产生一个围绕轴线的扭矩,驱动球绕自身轴线发生转动实现球的转向运动,如图2所示;当两个重摆以相反的方向快速运动到某一角度并瞬间停止,由于重摆快速运动产生的惯性力带动机器人向上运动,完成跳跃运动,如图3所示。在工作过程中,机器人通过视觉采集及传输系统将环境信息实时发送给嵌入式计算机,结合自身携带的惯性传感器模块的信息对球形辅助医疗智能装备进行实时运动状态解算,然后规划当前机器人最佳行动路线并发送给中央控制器,实现对机器人的精确稳定控制。
13、本发明中的辅助医疗球形滚跳机器人在医疗环境中可以完成导诊、远程诊疗、体征监测、消毒、巡检等任务。初入门诊,患者可以由该机器人引导完成挂号工作,并领取自己的身份码,机器人通过扫描身份码获取患者的医疗信息,然后引导患者前往主治医生科室,同时机器人检索医疗系统中患者的就诊记录获取患者病历并发送给主治医生,治疗完成后引导患者前往缴费、取药或者进一步检查的窗口。该机器人因具有球形包络外壳,不存在消毒死角,所以可作为消毒工具穿梭于传染病房、重症监护室等特殊病房,完成病房内的消毒杀菌工作。对于住院的患者,机器人可以监护患者生命体征,患者有需求时可以远程联系主治医生,对患者病情远程诊疗,实时把控患者恢复状态。
14、针对于复杂的医疗辅助任务,单个机器人功能无法满足时,机器人之间相互合作,呈现自适应分布式控制架构,根据复杂任务需求,自适应的决定群体大小、群体构型,弥补单个机器人在应对复杂医疗辅助任务时的缺陷,应对服务目标多、任务复杂、环境动态性强、目标多变的医疗辅助任务。该机器人通过对复杂任务进行决策规划,拆分成单个机器人可执行的简单任务,由多个机器人自适应分工合作一起完成复杂的医疗辅助任务。
15、辅助医疗球形滚跳机器人还具有记忆涌现机制。机器人可通过改变系统内球形辅助医疗智能装备间的连接实现群体组织广义拓扑结构的改变,但这对于多任务操作下的群体功能构型演化是复杂耗时的,每一种复杂的任务都要重构一次任务构型,大大降低了机器人执行任务的效率。该机器人具有的记忆涌现机制就可以解决这一难题,针对于重复的、相似的医疗辅助任务,机器人根据之前的记忆快速分析任务构型,提取出与当前任务相关的群体状态存入机器人群体构型决策因素中,快速决策规划出任务所需的最优构型。
16、对于医疗环境中复杂多变的任务场景,该机器人可以针对不同的任务需求改变拓扑构型。接收到任务的第一时间,机器人快速检索任务库,寻找与其相似或者相同的任务,将任务的执行构型提取出来放入构型决策池中,大大缩短任务构型决策时间,然后对不相同的任务内容进行拆解,将其分解成简单的非耦合任务,最后整理整个任务的执行构型方案,实现任务间的快速切换。
- 还没有人留言评论。精彩留言会获得点赞!