解耦双足机器人
本发明涉及机器人,尤其涉及一种解耦双足机器人。
背景技术:
1、双足机器人属于仿生机器人范畴,通过模仿两腿行走生物的结构特点来适应复杂环境从而提高移动效率。与传统的轮式移动机器人不同,双足机器人在非结构化路面行走时更有优势,能够在阶梯、沟壑等复杂路面行走。双足机器人能够适应人类的一般工作生活环境,在日常生活与工作环境中能够与人类更好地交互,甚至能够代替人类进行简单重复型劳动。
2、现有的双足机器人驱动元件众多,结构复杂。并且现有技术中的双足机器人在运动过程中,膝关节模块和踝关节模块除了x、y、z三轴方向的平动之外,还存在绕x、y、z三轴的转动,其运行工况复杂,控制难度较大。
3、因此,现有的双足机器人结构还有待改进。
技术实现思路
1、本发明提供一种解耦双足机器人,能够避免机器人关节的转动耦合,降低机器人的控制难度。
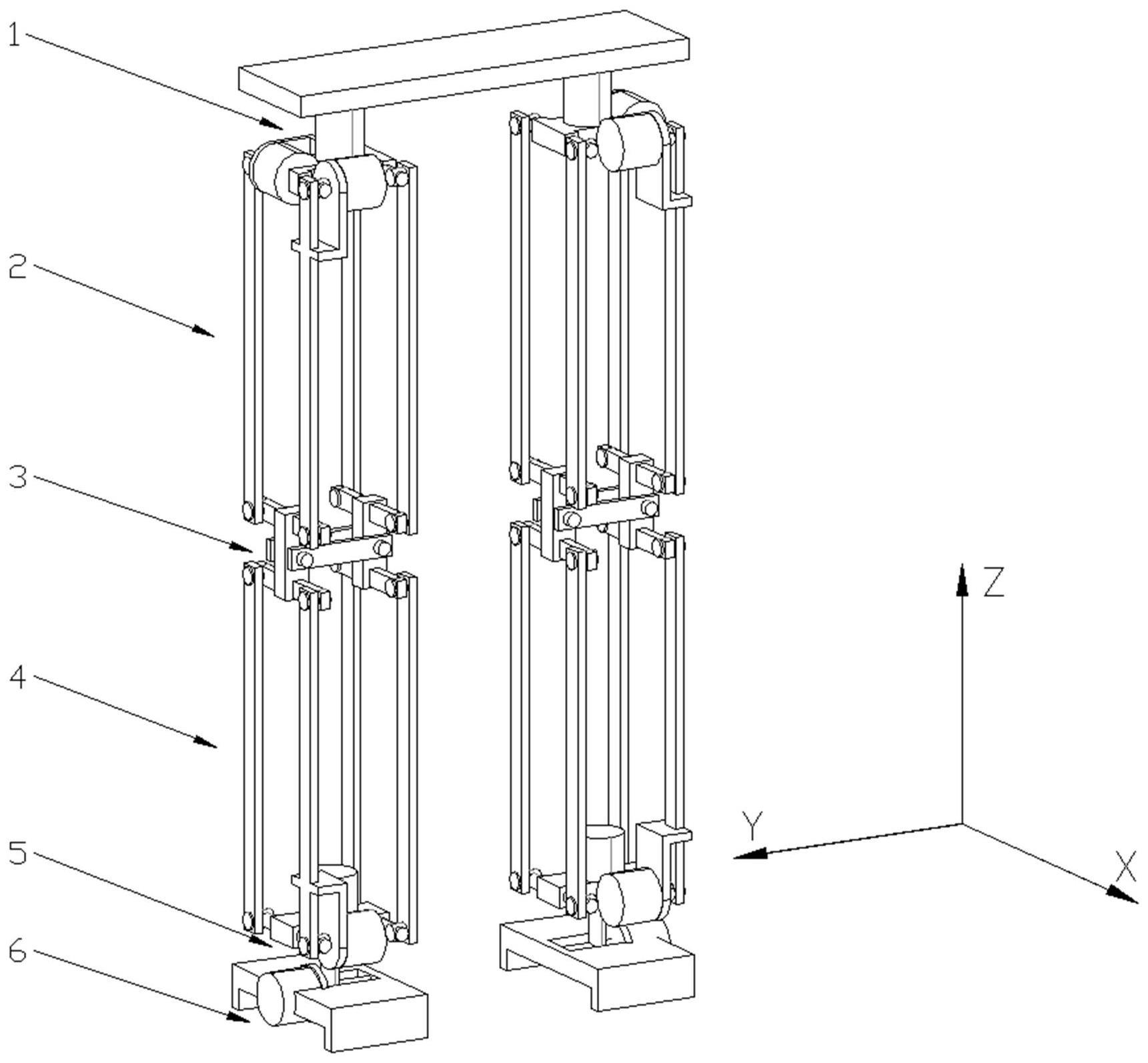
2、本发明提供一种解耦双足机器人,包括安装架,所述安装架的两侧分别设有腿结构,每个所述腿结构均包括依次连接的大腿模块、膝关节模块、小腿模块、踝关节模块和脚掌模块;
3、所述大腿模块包括第一驱动电机、第二驱动电机和大腿连杆机构,所述大腿连杆机构的第一端与所述安装架连接,所述第一驱动电机适用于驱动所述大腿连杆机构沿x方向摆动,所述第二驱动电机适用于驱动所述大腿连杆机构沿y方向摆动并带动所述小腿模块沿y方向摆动;
4、所述膝关节模块包括第一连接部、第二连接部和连接块,所述连接块的第一端与所述第一连接部铰接,所述连接块的第二端与所述第二连接部铰接,所述第一连接部和所述第二连接部分别与所述大腿连杆机构的第二端铰接;
5、所述小腿模块包括第三驱动电机和小腿连杆机构,所述第一连接部和所述第二连接部分别与所述小腿连杆机构的第一端铰接,所述小腿连杆机构的第二端与所述踝关节模块铰接,所述第三驱动电机适用于驱动所述小腿连杆机构沿x方向摆动。
6、根据本发明提供的解耦双足机器人,所述大腿连杆机构包括相互平行的第一大腿连杆、第二大腿连杆、第三大腿连杆和第四大腿连杆,所述第一大腿连杆、所述第二大腿连杆、所述第三大腿连杆和所述第四大腿连杆的第一端与所述安装架连接,所述第一大腿连杆和所述第四大腿连杆的第二端与所述第一连接部铰接,所述第二大腿连杆和所述第三大腿连杆的第二端与所述第二连接部铰接;
7、所述小腿连杆机构包括相互平行的第一小腿连杆、第二小腿连杆、第三小腿连杆和第四小腿连杆,所述第一小腿连杆和所述第四小腿连杆的第一端与所述第一连接部铰接,所述第二小腿连杆和所述第三小腿连杆的第一端与所述第二连接部铰接,所述第一小腿连杆、所述第二小腿连杆、所述第三小腿连杆和所述第四小腿连杆的第二端与所述踝关节模块铰接。
8、根据本发明提供的解耦双足机器人,所述安装架的两侧分别设有腿连接机构,所述腿连接机构包括连接板和与所述第一大腿连杆、所述第二大腿连杆、所述第三大腿连杆和所述第四大腿连杆一一对应的第一连接件,所述第一连接件包括垂直交叉设置的第一连接轴和第二连接轴,每个所述第一连接件的第二连接轴与所述连接板转动配合;
9、所述第一大腿连杆、所述第二大腿连杆、所述第三大腿连杆和所述第四大腿连杆的第一端分别与对应所述第一连接件的第一连接轴铰接;
10、所述第一驱动电机的输出轴与所述第一大腿连杆对应的所述第一连接件的第一连接轴固定连接,所述第一驱动电机的机身与所述第一大腿连杆固定连接,所述第二驱动电机的输出轴与所述第一大腿连杆对应的所述第一连接件的第二连接轴固定连接。
11、根据本发明提供的解耦双足机器人,所述第一连接部包括第一立柱,所述第一立柱的第一端设有第一铰接杆,所述第一大腿连杆的第二端与所述第一铰接杆的第一端铰接,所述第四大腿连杆的第二端与所述第一铰接杆的第二端铰接;
12、所述第二连接部包括第二立柱,所述第二立柱的第一端设有第二铰接杆,所述第二大腿连杆的第二端与所述第二铰接杆的第一端铰接,所述第三大腿连杆的第二端与所述第二铰接杆的第二端铰接。
13、根据本发明提供的解耦双足机器人,所述第一立柱的第二端设有第三铰接杆,所述第一小腿连杆的第一端与所述第三铰接杆的第一端铰接,所述第四小腿连杆的第一端与所述第三铰接杆的第二端铰接;
14、所述第二立柱的第二端设有第四铰接杆,所述第二小腿连杆的第一端与所述第四铰接杆的第一端铰接,所述第三小腿连杆的第一端与所述第四铰接杆的第二端铰接。
15、根据本发明提供的解耦双足机器人,所述踝关节模块包括固定板和与所述第一小腿连杆、所述第二小腿连杆、所述第三小腿连杆和所述第四小腿连杆一一对应的第二连接件,所述第二连接件包括垂直交叉设置的第三连接轴和第四连接轴,每个所述第二连接件的第四连接轴与所述固定板转动配合;
16、所述第一小腿连杆、所述第二小腿连杆、所述第三小腿连杆和所述第四小腿连杆的第二端端分别与对应所述第二连接件的第三连接轴铰接;
17、所述第三驱动电机的输出轴与所述第一小腿连杆对应的所述第二连接件的第三连接轴固定连接,所述第三驱动电机的机身与所述第一小腿连杆固定连接。
18、根据本发明提供的解耦双足机器人,还包括适用于驱动所述脚掌模块以z方向为转轴发生转动的偏航机构。
19、根据本发明提供的解耦双足机器人,所述偏航机构包括第四驱动电机,所述第四驱动电机设置于所述踝关节模块,所述第四驱动电机的输出轴与所述脚掌模块连接。
20、根据本发明提供的解耦双足机器人,所述脚掌模块包括支撑件和第五驱动电机,所述第五驱动电机适用于驱动所述支撑件沿x方向摆动。
21、根据本发明提供的解耦双足机器人,所述第五驱动电机的输出轴与所述第四驱动电机的输出轴固定连接,所述第五驱动电机的机身与所述支撑件固定连接。
22、本发明提供的解耦双足机器人,通过设置大腿连杆机构和小腿连杆机构,并通过第一驱动电机驱动大腿连杆机构沿x方向前后摆动,通过第二驱动电机驱动大腿连杆机构和小腿连杆机构沿y方向侧向摆动,通过第三驱动电机驱动小腿连杆机构沿沿x方向前后摆动,能够通过对第一驱动电机、第二驱动电机和第三驱动电机的控制增强机器人在前进或后退时的稳定性使其能够在复杂的路面环境上行进,并且能够避免机器人关节的转动耦合,降低机器人的控制难度。
技术特征:
1.一种解耦双足机器人,其特征在于,包括安装架,所述安装架的两侧分别设有腿结构,每个所述腿结构均包括依次连接的大腿模块、膝关节模块、小腿模块、踝关节模块和脚掌模块;
2.根据权利要求1所述的解耦双足机器人,其特征在于,所述大腿连杆机构包括相互平行的第一大腿连杆、第二大腿连杆、第三大腿连杆和第四大腿连杆,所述第一大腿连杆、所述第二大腿连杆、所述第三大腿连杆和所述第四大腿连杆的第一端与所述安装架连接,所述第一大腿连杆和所述第四大腿连杆的第二端与所述第一连接部铰接,所述第二大腿连杆和所述第三大腿连杆的第二端与所述第二连接部铰接;
3.根据权利要求2所述的解耦双足机器人,其特征在于,所述安装架的两侧分别设有腿连接机构,所述腿连接机构包括连接板和与所述第一大腿连杆、所述第二大腿连杆、所述第三大腿连杆和所述第四大腿连杆一一对应的第一连接件,所述第一连接件包括垂直交叉设置的第一连接轴和第二连接轴,每个所述第一连接件的第二连接轴与所述连接板转动配合;
4.根据权利要求2所述的解耦双足机器人,其特征在于,所述第一连接部包括第一立柱,所述第一立柱的第一端设有第一铰接杆,所述第一大腿连杆的第二端与所述第一铰接杆的第一端铰接,所述第四大腿连杆的第二端与所述第一铰接杆的第二端铰接;
5.根据权利要求4所述的解耦双足机器人,其特征在于,所述第一立柱的第二端设有第三铰接杆,所述第一小腿连杆的第一端与所述第三铰接杆的第一端铰接,所述第四小腿连杆的第一端与所述第三铰接杆的第二端铰接;
6.根据权利要求5所述的解耦双足机器人,其特征在于,所述踝关节模块包括固定板和与所述第一小腿连杆、所述第二小腿连杆、所述第三小腿连杆和所述第四小腿连杆一一对应的第二连接件,所述第二连接件包括垂直交叉设置的第三连接轴和第四连接轴,每个所述第二连接件的第四连接轴与所述固定板转动配合;
7.根据权利要求1-6任一项所述的解耦双足机器人,其特征在于,还包括适用于驱动所述脚掌模块以z方向为转轴发生转动的偏航机构。
8.根据权利要求7所述的解耦双足机器人,其特征在于,所述偏航机构包括第四驱动电机,所述第四驱动电机设置于所述踝关节模块,所述第四驱动电机的输出轴与所述脚掌模块连接。
9.根据权利要求8所述的解耦双足机器人,其特征在于,所述脚掌模块包括支撑件和第五驱动电机,所述第五驱动电机适用于驱动所述支撑件沿x方向摆动。
10.根据权利要求9所述的解耦双足机器人,其特征在于,所述第五驱动电机的输出轴与所述第四驱动电机的输出轴固定连接,所述第五驱动电机的机身与所述支撑件固定连接。
技术总结
本发明提供一种解耦双足机器人,包括安装架,安装架的两侧设有腿结构,每个腿结构均包括大腿模块、膝关节模块、小腿模块、踝关节模块和脚掌模块;大腿模块包括第一驱动电机、第二驱动电机和大腿连杆机构,大腿连杆机构的第一端与安装架连接;膝关节模块包括第一连接部、第二连接部和连接板,连接块的第一端与第一连接部铰接,连接块的第二端与第二连接部铰接,第一连接部和第二连接部分别与大腿连杆机构的第二端铰接;小腿模块包括第三驱动电机和小腿连杆机构,第一连接部和第二连接部分别与小腿连杆机构的第一端铰接,小腿连杆机构的第二端与踝关节模块铰接。本发明提供的解耦双足机器人,能够避免机器人关节的转动耦合,降低机器人的控制难度。
技术研发人员:杨东超,曾泽璀,叶强,陈晨,黄赓
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!