一种轮腿结构及轮足机器人
本发明设计机器人制造,更具体地,涉及一种轮腿结构及轮足机器人。
背景技术:
1、目前足式机器人存在续航能力差、轮式机器人存在越障性能差等问题,将轮式、足式合并为一体的轮足机器人成为目前研究一个重点。
2、轮足机器人在其结构上可划分为非耦合型和耦合型。非耦合型轮足机器人采用轮式结构与足式结构在机器人上独立设计,耦合型轮足机器人将轮式结构集成到机器人腿部结构上。
3、中国专利公开号cnl14590337a公开了一种轮足复合式机器人轮式运动系统级机器人,该系统以足式机器人为基础,在其躯干结构上增加可用于收放的轮式结构。机器人将轮式结构收起,以足式机器人形态进行足式模态控制,或将轮式结构放下进行机器人的轮式模态控制。该类型机器人轮-足模态控制切换简单,但其复合型的独立结构使整个机器人的躯干结构过于庞大,运动过程中会由于结构过大,会产生部分偏心转矩,不利于机器人的运动控制。中国专利公开号cn114275072a公开了一种可以实现机器人轮足两种状态切换的装置,该装置在足端集成轮式和足式的切换设计,通过一组滑块机构实现足端结构中足式组件的收放,该装置简单有效,但该结构的滑块装置及其驱动组件较大,会使轮腿结构重量过大。中国专利公开号cn114919675a公开了一种轮足切换机构及其控制方法,该机构通过丝杠结构/蜗轮蜗杆带动足端脚掌上升下降,完成足端轮与地面分离或接触,实现轮式运动和足式运动的切换,但其切换机构依靠丝杠结构/蜗轮蜗杆结构,使得机器人的负载受到很大限制。
4、中国专利公开号cn114987642a公开了一种可自主切换的被动轮自锁防滑足,该专利介绍了一种基于齿盘咬合的足端轮自锁方法,利用两个结构件间的刚性连接,对足端从动轮进行制动,该装置缺少主动轮的驱动来源且齿盘咬合的两个结构件加工精度要求较高。中国专利公开号cn219570691u公开了一种轮毂电机制动器结构,该结构由制动卡钳提供夹紧力,对安装在轮子结构上的制动盘进行夹紧制动,该结构提供了一种简单有效的轮毂电机制动方案,但其制动卡钳及其驱动结构较大,不适用于移动机器人紧凑型设计。
5、已有的轮足机器人单腿结构电机多采用单支点悬臂梁电机模组结构,该方式因其结构特性会造成支点存在一个倾覆力矩,并且多以关节电机输出轴直连腿部结构,使电机输出转矩驱动时又要承担结构受力载荷,降低结构的可靠性和关节电机的寿命;又或者采用电机-连杆-电机-连杆的串联式结构,造成机器人腿部惯量过大,能源利用率不高。
6、综上所述,目前轮足机器人的轮腿结构还没有一套能够集成足端轮毂电机的轮式驱动及轮毂电机机械制动的足式驱动方案的轮腿结构。因此,需要提供一种对上述现有技术不足的改进技术方案。
技术实现思路
1、发明目的:提供一种轮腿结构及轮足机器人的新技术方案,至少能够解决现有技术中的轮足机器人的足端轮结构轮式模态和足式模态切换效率和不灵活等问题,并改善在足式控制下易受到瞬时冲击力矩而造成的足端窜动,提高机器人可靠性。
2、技术方案:为解决上述技术问题,本发明采用如下的技术方案:
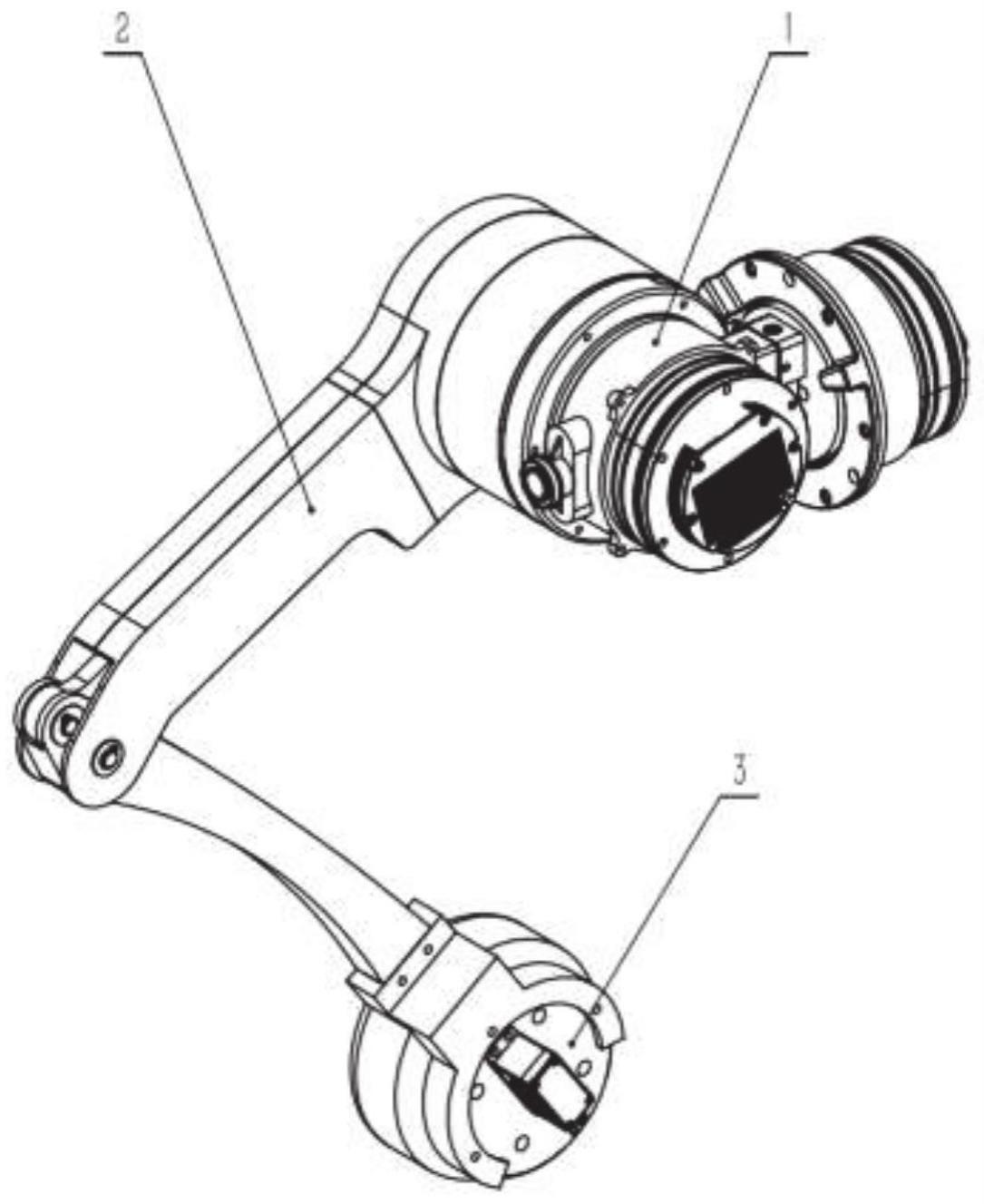
3、根据本发明的一个方面,提供了一种轮腿结构,其特征在于,所述结构包括:关节模组、运动连杆组件和轮足组件;所述关节模组与运动连杆组件连接,为机器人提供腿部结构空间运动的驱动力;所述运动连杆组件连接关节模组和轮足组件,用于带动所述轮足组件做空间运动及腿部的结构支撑;所述轮足组件安装在运动连杆组件上,用于实现机器人足式模态和轮式模态的切换;所述轮足组件包括轮毂电机组件、轮足切换组件和切换驱动组件;所述轮毂电机组件安装在轮足切换组件,用于实现轮式驱动及构成轮足的接触端面;所述轮足切换组件连接轮毂电机组件和切换驱动组件,用于执行轮式模态和足式模态的切换;所述切换驱动组件安装在轮足切换组件上,用于安装轮足切换组件的驱动舵机及连接运动连杆组件。
4、所述轮毂电机组件包括轮毂制动盘、轮毂电机、轮毂电机输出盘和轮毂转动轮;所述轮毂电机输出盘安装在轮毂电机上,所述轮毂制动盘连接轮毂电机输出盘;所述轮毂电机可使轮毂电机输出盘、轮毂制动盘和轮毂转动轮进行同轴转动,用于实现轮式运动;所述切换驱动组件包括转矩舵机、轮足组件转接件和舵机固定盘;所述转矩舵机安装在舵机固定盘上,用于轮足组切换组件的驱动元件;所述轮足组件转接件连接舵机固定盘,并用于连接到运动连杆组件。
5、所述轮足切换组件包括切换转盘轴、舵机输出码盘、滑块二力杆、滑块件、摩擦块固定件、摩擦块、转盘轴前轴承、滑块轨道盘和转盘轴后轴承;
6、所述轮足切换组件为曲柄滑块机构,具体结构连接方式如下:所述滑块轨道盘左端面连接轮毂电机组件中的轮毂电机,右端面连接切换组件中的舵机固定盘,通过滑块轨道盘将轮毂电机组件、轮足切换组件和切换驱动组件进行连接;
7、所述滑块件安装于轨道盘轨道槽上形成移动副,与轨道槽做直线运动;所述摩擦块固定件用于桥接滑块件和摩擦块,使摩擦块随滑块件作直线往复运动,其中摩擦块边沿位置到滑块件与滑块二力杆连接位置作为第一滑块长度,长度记为c;所述滑块二力杆通过转轴桥接滑块件和切换转盘轴形成两个转动副,在结构约束下做平行于轨道盘上轨道槽平面的运动,滑块二力杆与切换转盘轴和滑块件两个连接位置作为第二连杆长度,记为a;
8、所述的摩擦块为具有延展性能及弹性性能的材料;所述轮毂转动轮为合成橡胶材料,用于户外崎岖路面情况下的运动减震,或尼龙材料,用于室内坚硬平滑地面;
9、所述舵机输出码盘与切换驱动组件中的转矩舵机输出轴相连,并于切换转盘轴的端面连接,为切换转盘轴提供轴向约束;所述转盘轴前轴承和转盘轴后轴承通过过盈配合安装在滑块轨道盘的中心通孔上,并用于切换转盘轴构成双支点各单向固定,形成转动副,并为切换转盘轴提供周向约束和支撑力;切换转盘轴其轴心线到滑块二力杆连接位置作为第一连杆长度,长度记为b。
10、所述滑块轨道盘与舵机固定盘连接一侧有绕其盘的轴心周向对称分布的轨道槽;所述滑块轨道盘的盘中心具有通孔特征,用于紧配合安装切换转盘轴的轴承件,实现切换转盘轴双支点各单向固定。
11、所述的滑块轨道盘上的轨道为具有包容型截面的轨道;所述包容型截面宜采用t形、y形等具有包容型截面的凸形轨道或者倒t形、倒三角形等具有包容型截面的凹形槽道;所述的滑块轨道盘上的轨道按照盘的轴心线圆周对称分布n条轨道,其中n≥3。
12、所述切换转盘轴为一长轴法兰盘件;所述切换转盘轴其轴面上用于固定转盘轴前轴承和转盘轴后轴承,并安装在滑块轨道盘的中心通孔上,可相对于滑块轨道盘的轴心线做圆周运动;所述切换转盘轴其法兰盘面有n个孔位,与滑块轨道盘上的轨道数目一致,用于与滑块二力杆连接。
13、所述切换驱动组件中的转矩舵机做圆周转动,连接转矩舵机输出轴的舵机输出码盘带动连接其端面的切换转盘轴做圆周转动,即带动曲柄滑块模型的第一连杆转动并使第一滑块作直线运动;所述摩擦块在曲柄滑块机构模型第一滑块下,并在第一滑块、第一连杆、第二连杆间的转动副和移动副形成的约束下,在滑块轨道盘上的轨道做直线运动。
14、所述滑块二力杆在曲柄滑块机构模型约束下,与滑块轨道盘上的轨道平行时,为曲柄滑块机构的一个死点位形;记d为所述轮毂制动盘的内盘腔孔半径,e为所述摩擦块材料可变回弹范围,在该死点位形下,当第一连杆、第二连杆和第一滑块的长度参数a+b+c-d≥e时,摩擦块外边沿将紧紧贴合轮毂制动盘的内盘腔孔,形成过盈紧配合状态,e为0-1mm;此死点位形下,摩擦块所受的外力作为机构的主动力无法使连杆之间相互运动,使得机构无需额外控制的锁定即可保持轮毂制动盘无法运动状态,即与摩擦块贴合的轮毂制动盘及其连接各部件都处于制动状态,即轮毂转动轮作为足端处于制动状态,此时机器人处于足式状态;所述滑块二力杆与滑块轨道盘上的轨道非平行时,为曲柄滑块机构的非死点位形,在该位形下摩擦块与轮毂制动盘未贴合,处于非制动状态,机器人处于轮式状态,轮式驱动力由轮毂电机提供。
15、所述关节模组包括第一关节模组、第二关节模组和第三关节模组;所述第一关节模组包括第一关节输出盘、第一关节电机固定盘和第一关节电机;所述第一关节电机连接第一关节输出盘,并安装在第一关节电机固定盘上;所述第二关节模组包括第二关节电机、第二关节电机固定盘、第二关节轴承和第二关节输出盘;所述第二关节电机固定盘通过周面上的方形安装特征与第一关节输出盘进行连接并固定第二关节电机;所述第二关节轴承通过过盈配合安装在第二关节电机固定盘上,并连接第二关节输出盘;所述第三关节模组包括连轴转接盘、第三关节电机、第三关节电机固定盘和第三关机轴承;所述连轴转接盘为一个中间盘件,盘左右两面具有绕盘的轴心线呈90°交错的正六边形凸台特征,左面固定第二关节输出盘,右面固定第三关节电机的同时连接固定第三关节电机固定盘,所述第三关节轴承通过过盈配合安装在第三关节电机固定盘上;所述第二关节轴承和所述第三关节轴承为交叉滚子轴承,用于承担结构件所受横向和纵向的载荷及冲击。
16、所述的运动连杆组件为简易的四杆机构模型,机架与第三关节模组的固定盘固连,由第二关节模组提供其运动空间转动,连接第三关节模组的输出关节作为主动杆,利用中间二力连杆将力矩传递给第三关节输出连杆作为从动杆,轮足组件安装在从动杆末端,从而实现轮足组件的空间运动;
17、根据本发明的另一方面,提供了轮足机器人,所述轮足机器人包括如上述的轮腿结构;包括关节模组固定前面板、关节模组固定后面板、固定面板中间梁、前面板轴承、机身等;
18、本发明与现有技术相比,其显著优点是:
19、(1)本发明轮腿结构中的足端轮足组件将轮毂电机与滑块结构结合,实现机器人轮-足模式的快速切换,相对于轮毂电机驱动件的位置控制模式,使用机械结构切换轮-足模式可靠性更高,并且减少由位置控制模式带来的轮毂电机持续使能下的电量高损耗问题。
20、(2)本发明轮腿结构中的足端轮足组件通过曲柄滑块构件及其滑块死点特性,可实现轮式结构的快速制动,结构设置简单,其制动施加力矩最终作用于结构件上,能够有效保护轮式驱动电机。
21、(3)本发明轮腿结构中的足端轮足组件在足式模态下,轮毂部分作为主动力来源,其滑块结构的死点制动特性能够使轮毂转动结构在足式运动中不会产生窜动滑移现象,有助于提高轮足机器人轮-足模式切换控制的可靠性。
22、(4)本发明轮腿结构中的轮足组件运用曲柄滑块结构及平面特性,避免增加冗余的电磁衔铁制动设计,结构更为紧凑。同时,曲柄滑块的加工与其它齿盘类型的轮毂制动方式相比更为简单,精度要求更低。
23、(5)本发明轮腿结构中的关节模组将关节电机及其安装结构件利用联轴器形式进行组合,保证关节输出轴的对中性,并利用交叉滚子轴承将轮腿运动过程中的冲击传递到机身结构件上,有效提高轮腿的可靠性。
24、通过以下参考附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!