一种四足负压吸附式可地壁过渡的爬壁机器人
本发明属于机器人,具体涉及一种四足负压吸附式可地壁过渡的爬壁机器人。
背景技术:
1、爬壁机器人是移动机器人的一个重要分支,又称壁面移动机器人,是指能够在垂直墙壁上攀爬并完成工作的机器人。爬壁机器人具有自动化程度高、能够代替人完成特殊场合下作业的特点,因此近些年成为国内外学者的研究热点。典型应用场景为代替人的高空作业,如高楼的清洁作业、大型油罐的喷漆及检测探伤、大型船舶除锈和桥梁检测等,爬壁机器人有望将人类从这些重复、危险的劳动作业中解放出来。
2、为拥有较强的越障能力、适应各种地形,经常采用四足式负压吸附设计爬壁机器人。然而该方式下设计的爬壁机器人由于控制难度大,以此往往难以灵活行动。中国专利cn202310004997,公开日2023年5月12日,发明创造的名称为一种类壁虎智能仿生机器人,该申请案公开了一种智能的、可以在墙壁上吸附并攀爬的仿生类壁虎机器人,其不足之处在于难以实现从地面到壁面的过渡爬行,总体行动灵活性较低。
3、因此,如何提供一种运动灵活的四足负压吸附式可地壁过渡的爬壁机器人是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种四足负压吸附式可地壁过渡的爬壁机器人,利用两个躯干模块实现机器人的俯仰变化,灵活性强,可以完成机器人的地壁过渡。
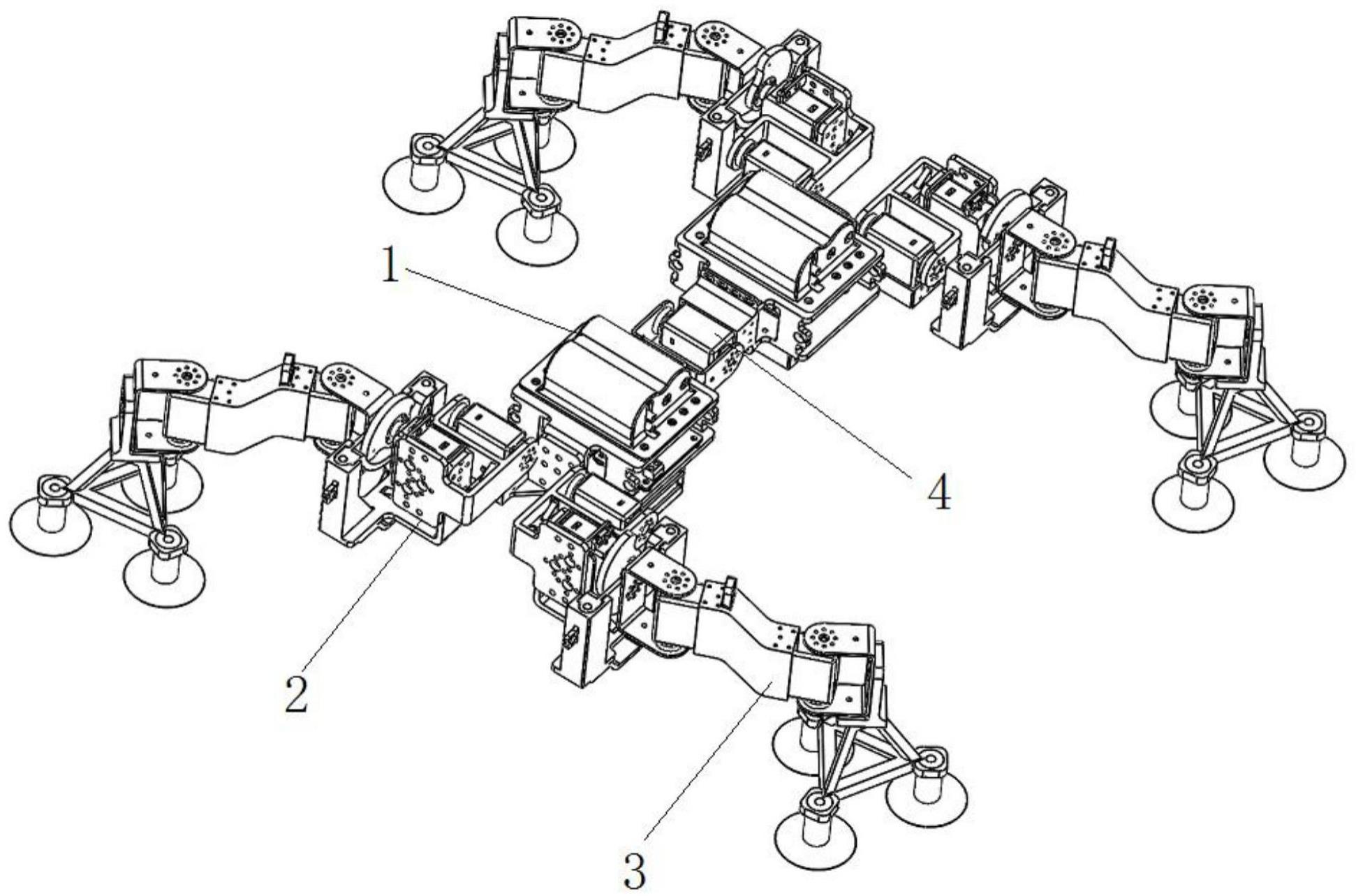
2、为了达到上述目的,本发明采用如下技术方案:一种四足负压吸附式可地壁过渡的爬壁机器人,其包括:
3、躯干模块,所述躯干模块有两组且相对布置,所述躯干模块相远离的端部分别固定连接有关节座,每一个关节座上均设有两个安装位;
4、腰部调节机构,所述腰部调节机构连接在两组躯干模块之间并调节两组躯干模块的张合夹角;
5、过渡关节机构,所述过渡关节机构两两成组且分别一一对应安装在所述安装位上,所述过渡关节机构上连接有摆动端和执行端,所述执行端上下滑动连接在摆动端上;
6、腿足机构,所述腿足机构有多组且分别一一对应固定连接在执行端,每一个所述腿足机构上均设有足部吸盘组,所述足部吸盘组与壁面接触,所述躯干模块分别与腰部调节机构、过渡关节机构、腿足机构电信号连接并完成指令动作。
7、本发明的有益效果是:两个躯干模块通过腰部调节机构连接起来,腰部调节机构可以改变两个躯干模块的张合角度,适应复杂的环境,便于地壁过渡,利用过渡关节机构来实现腿足机构的位置灵活调节,完成机器人的前进和吸壁过程,本发明独特的地壁过渡方式可以在各类环境中灵活运动。
8、优选的,所述躯干模块包括安装壳体、单片机、电磁继电器、舵机控制板、真空泵、移动电源及避障传感器,所述单片机、电磁继电器、舵机控制板固定连接在所述安装壳体内,所述关节座螺栓连接在所述安装壳体的一端,所述电磁继电器和舵机控制板分别与单片机电信号连接,所述舵机控制板分别与腰部调节机构、过渡关节机构、腿足机构电信号连接,所述真空泵和移动电源分别固定在安装壳体的外侧壁上,所述真空泵与电磁继电器电信号连接并与足部吸盘组连通提供负压吸附力,所述移动电源与单片机电连接提供能源,所述避障传感器固定在关节座的两个安装位之间并与单片机电信号连接。
9、由此产生的技术效果是:单片机是整个机器人的控制中枢,真空泵用来提供足部吸盘的吸附力,完成机器人的负压吸附,避障传感器是超声波传感器,可以探知前方障碍,使得机器人自适应前行。
10、优选的,所述安装壳体的顶部螺栓连接有泵盖,所述真空泵位于所述泵盖内,所述安装壳体的底部固定有电池盒,所述移动电源可拆卸连接在所述电池盒内。
11、由此产生的技术效果是:利用泵盖和电池盒来保护真空泵和移动电源,构件安装隐蔽性好,有一定的掉摔防护作用。
12、优选的,所述腰部调节机构包括腰部调节舵机及连接板,所述腰部调节舵机固定在其中一个躯干模块的安装壳体另一端,所述连接板固定在另一个躯干模块安装壳体的另一端,所述连接板为u型板,所述腰部调节舵机的输出轴连接有舵盘,所述舵盘固定在u型板的内侧壁上,所述腰部调节舵机与舵机控制板电信号连接并控制连接板的转动角度。
13、由此产生的技术效果是:腰部调节电机利用舵盘实现与连接板的安装,在舵机输出轴的转动下,舵盘及连接板与舵机之间的角度变化,进而实现两个躯干模块的张合角度调节,提高机器人的通过性。
14、优选的,所述过渡关节机构包括第一调节舵机、舵机支架、第二调节舵机、关节支架、凸轮座及凸轮,所述第一调节舵机固定连接在安装位上并与舵机控制板电信号连接,所述舵机支架转动连接在第一调节舵机的两端并由舵机的输出轴控制舵机支架的转动角度,所述舵机支架为摆动端,所述关节支架固定在所述舵机支架上,所述第二调节舵机固定在所述关节支架上并与舵机控制板电信号连接,所述凸轮固定连接在所述第二调节舵机的输出轴上,所述关节支架上设有滑槽,所述凸轮座滑动连接在所述滑槽内,所述凸轮座为执行端,所述凸轮与凸轮座相对滑动,所述凸轮的转动促使所述凸轮座在滑槽内滑动。
15、由此产生的技术效果是:第一调节舵机实现舵机支架的摆动,实现腿足机构上下摇摆,凸轮的转动会下压凸轮座,凸轮座直接影响腿足机构的位置,也就是说第二调节舵机用来调节腿足机构的上下移动,此时,凸轮座与凸轮始终是高副接触的,凸轮的转动下压凸轮座,以此带动腿足机构上下移动。
16、优选的,所述腿足机构包括腿部组件和足部组件,所述腿部组件包括腿杆、腿部调节舵机、踝部调节舵机及过渡板,所述腿部调节舵机与踝部调节舵机分别固定在腿杆的两端并与舵机控制板电信号连接,所述腿部调节舵机及踝部调节舵机上均转动连接有过渡板,所述腿部调节舵机上的过渡板与凸轮座固连,所述踝部调节舵机上的过渡板与足部组件固连。
17、由此产生的技术效果是:利用腿部调节舵机调节腿杆的位置,利用踝部调节机构调节足部组件的位置,机器人可以仿壁虎姿态前行。
18、优选的,所述足部组件包括三角架及足部吸盘组,所述三角架与踝部调节舵机上的过渡板固连,所述足部吸盘组中的多个吸盘分别一一对应固定在三角架的边角上,所述吸盘与真空泵管路连通。
19、由此产生的技术效果是:三角架安装足部吸盘组,利用每一个腿足机构上的足部吸盘组实现地、壁吸附,实现地、壁爬行。
20、优选的,所述吸盘的中部固定连接并连通有空心螺杆,所述空心螺杆与三角架固连,所述空心螺杆与真空泵管路连通,所述空心螺杆的外侧套设有胶管。
技术特征:
1.一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,包括:
2.根据权利要求1所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述躯干模块(1)包括安装壳体(11)、单片机(12)、电磁继电器(13)、舵机控制板(14)、真空泵(15)、移动电源(16)及避障传感器,所述单片机(12)、电磁继电器(13)、舵机控制板(14)固定连接在所述安装壳体(11)内,所述关节座(19)螺栓连接在所述安装壳体(11)的一端,所述电磁继电器(13)和舵机控制板(14)分别与单片机(12)电信号连接,所述舵机控制板(14)分别与腰部调节机构(4)、过渡关节机构(2)、腿足机构(3)电信号连接,所述真空泵(15)和移动电源(16)分别固定在安装壳体(11)的外侧壁上,所述真空泵(15)与电磁继电器(13)电信号连接并与足部吸盘组(36)连通提供负压吸附力,所述移动电源(16)与单片机(12)电连接提供能源,所述避障传感器固定在关节座(19)的两个安装位之间并与单片机(12)电信号连接。
3.根据权利要求2所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述安装壳体(11)的顶部螺栓连接有泵盖(17),所述真空泵(15)位于所述泵盖(17)的内侧,所述安装壳体(11)的底部固定有电池盒(18),所述移动电源(16)可拆卸连接在所述电池盒(18)内。
4.根据权利要求3所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述腰部调节机构(4)包括腰部调节舵机(41)及连接板(42),所述腰部调节舵机(41)固定在其中一个躯干模块安装壳体的另一端,所述连接板(42)固定在另一个躯干模块安装壳体的另一端,所述连接板(42)为u型板,所述腰部调节舵机(41)的输出轴连接有舵盘(43),所述舵盘(43)固定在u型板的内侧壁上,所述腰部调节舵机(41)与舵机控制板(14)电信号连接并控制连接板的转动角度。
5.根据权利要求4所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述过渡关节机构(2)包括第一调节舵机(21)、舵机支架(22)、第二调节舵机(23)、关节支架(24)、凸轮座(25)及凸轮(26),所述第一调节舵机(21)固定连接在安装位(191)上并与舵机控制板(14)电信号连接,所述舵机支架(22)转动连接在第一调节舵机(21)的两端并由舵机的输出轴控制舵机支架的转动角度,所述舵机支架(22)为摆动端,所述关节支架(24)固定在所述舵机支架(22)上,所述第二调节舵机(23)固定在所述关节支架(24)上并与舵机控制板(14)电信号连接,所述凸轮(26)固定连接在所述第二调节舵机(23)的输出轴上,所述关节支架(24)上设有滑槽(27),所述凸轮座(25)滑动连接在所述滑槽(27)内,所述凸轮座(25)为执行端,所述凸轮(26)与凸轮座(25)相对滑动,所述凸轮(26)的转动促使所述凸轮座(25)在滑槽(27)内滑动。
6.根据权利要求5所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述腿足机构(3)包括腿部组件和足部组件,所述腿部组件包括腿杆(31)、腿部调节舵机(32)、踝部调节舵机(33)及过渡板(34),所述腿部调节舵机(32)与踝部调节舵机(33)分别固定在腿杆(31)的两端并与舵机控制板(14)电信号连接,所述腿部调节舵机(32)及踝部调节舵机(33)上均转动连接有过渡板(34),所述腿部调节舵机(32)上的过渡板(34)与凸轮座(25)固连,所述踝部调节舵机(33)上的过渡板(34)与足部组件固连。
7.根据权利要求6所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述足部组件包括三角架(35)及足部吸盘组(36),所述三角架(35)与踝部调节舵机(33)上的过渡板(34)固连,所述足部吸盘组(36)中的多个吸盘分别一一对应固定在三角架(35)的边角上,所述吸盘与真空泵(15)管路连通。
8.根据权利要求7所述的一种四足负压吸附式可地壁过渡的爬壁机器人,其特征在于,所述吸盘的中部固定连接并连通有空心螺杆(37),所述空心螺杆(37)与三角架(35)固连,所述空心螺杆(37)与真空泵(15)管路连通,所述空心螺杆(37)的外侧套设有胶管。
技术总结
本发明公开了一种四足负压吸附式可地壁过渡的爬壁机器人,其包括:躯干模块,躯干模块有两组且相对布置,躯干模块相远离的端部分别固定连接有关节座,每一个关节座上均设有两个安装位;腰部调节机构连接在两组躯干模块之间并调节两组躯干模块的张合夹角;过渡关节机构,过渡关节机构两两成组且分别一一对应安装在安装位上,过渡关节机构上连接有摆动端和执行端,执行端上下滑动连接在摆动端上;腿足机构,腿足机构有多组且分别一一对应固定连接在执行端,每一个腿足机构上均设有足部吸盘组,足部吸盘组与壁面接触,躯干模块分别与腰部调节机构、过渡关节机构、腿足机构电信号连接并完成指令动作,本发明灵活性强,可适应不同的环境。
技术研发人员:刘雅静,刘润利,王卫林,张严
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!