一种人形机器人大腿及人形机器人、制造方法与流程
本发明属于仿人机器人精密制造领域,尤其涉及一种人形机器人大腿及人形机器人、制造方法。
背景技术:
1、人形机器人是仿生机构学的标志性成果,它的外貌特征和关节布局都模仿人体,因此具有与人相似的关节灵活度,理论上能够完成人的各种肢体动作,在替代人进行各种繁重、单调劳动以及灾场救援等应用场景有较大的潜力。目前人形机器人在人工智能技术的推动下具备了群核计算、机器视觉等功能,能够与人类有良好的互动,因此在未来陪伴老人和小孩方面有长足的发展可能,是各国争相发展的机器人类型。
2、为了实现机器人在上述应用场景中的功能需求,机器人的结构件尤其是下肢的主承力件,例如大腿、小腿、脚板等应具备轻质、高强的特征,这样的特征使得结构件运动时转动惯性较小,从而提高人形机器人执行复杂手势等动作的位置准确性。同时,机器人外观要符合人类的审美,因为漂亮的外观能够增进人类对它的好感,为人机互动奠定感情基础。另外,机器人部件需要高度一体化,目前机器人大腿部部件零件数量较多,零件之间采用机械连接,而连接部位相比基体更容易失效,因此减少连接点位的数量能够提高零件使用寿命,增加机器人续航时间。
3、本发明围绕上述功能需求,基于选择性激光熔化技术,设计一种“结构-外观”一体化的人形机器人大腿,将大腿分为承力部分和外观部分,承力部分设计为“局部增厚壳体+等密度点阵”的构型,外观部分设置为等厚度的薄壳体,在承力部分和外观部分之间的空腔内设置等密度点阵,并将承力部分与外观部分复合成一体,大腿各组件通过选择性激光熔化工艺整体成型,无机械连接接头。该大腿具备轻质、高强的特征,一体化的外观符合接近人类的审美需求,并且能够减少连接点位,增加机器人下肢部件的使用寿命。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种人形机器人大腿及人形机器人、制造方法。
2、本发明的目的是通过以下技术方案来实现的:本发明实施例第一方面提供了一种人形机器人大腿,所述大腿为一体成型结构,所述大腿各组件通过选择性激光熔化工艺一体成型,所述大腿包括:
3、骨架,包括壳体、第一加强板、第二加强板和第二等密度点阵,所述壳体的上端对称设置有两个第一加强板,所述第二加强板设置在所述壳体的下端,所述第二等密度点阵填充在所述骨架去除壳体、第一加强板和第二加强板后的剩余空间;
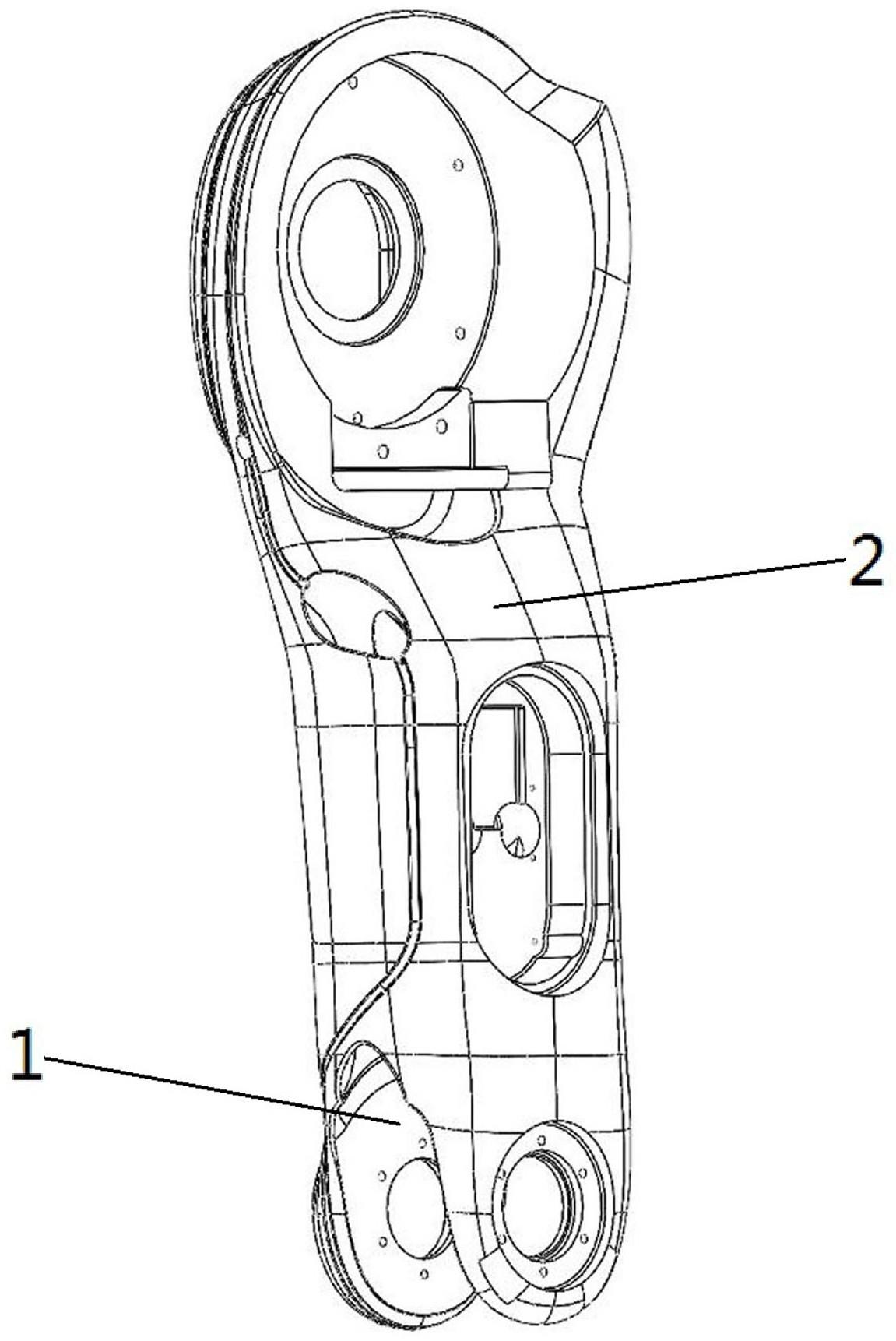
4、皮肤,其上端设置有第二电机安装部、髋电机罩壳和第二电机安装卡槽,所述髋电机罩壳包围所述第二电机安装部,所述第二电机安装卡槽设置在所述第二电机安装部的下方;所述皮肤的中间部位一侧设置有pcb板安装槽和pcb盖板安装部,另一侧设置有装饰板安装槽和装饰板安装部,所述皮肤的中间部位设置有第二通讯线槽;所述皮肤的下端设置有第二轴承安装槽和第二轴承端盖贴合部;和
5、第一等密度点阵,填充在所述骨架和所述皮肤之间。
6、进一步地,所述大腿采用的材料为铝镁钪锆,所述大腿采用的工艺为激光金属3d打印。
7、进一步地,所述壳体的上端设置有一电机安装部和第一电机安装卡槽,所述第一电机安装卡槽设置在所述第一电机安装部的下方;
8、所述壳体的中间部位设置有减重槽、第一通讯线槽、电机电源线槽和斜坡部,所述减重槽位于所述斜坡部的上方;
9、所述壳体的下端设置有第一轴承安装槽和第一轴承端盖贴合部。
10、进一步地,所述壳体的厚度为2.1mm-2.5mm;
11、所述皮肤的厚度为壳体的厚度的1/3~1/2。
12、进一步地,所述第一加强板的上端连接在第一电机安装卡槽的底部槽面,所述第一加强板的下端连接在壳体的纵向壁面上。
13、进一步地,所述第一加强板和所述第二加强板上均设置有漏粉孔;
14、所述漏粉孔为椭圆状,其长轴与对应的第一加强板或第二加强板的长度方向平行,其短轴的长度小于等于对应的第一加强板或第二加强板的宽度的1/2;
15、所述漏粉孔的直径为3-4mm。
16、进一步地,所述第一等密度点阵和所述第二等密度点阵的胞元结构参数相同,其中,所述胞元结构参数包括胞元边长、杆径和倾角;
17、所述第一等密度点阵和所述第二等密度点阵的杆径与胞元边长之比均为1/7~1/9,且杆径大于等于0.5mm。
18、进一步地,所述壳体和所述第二等密度点阵之间的界面区域通过第二等密度点阵的过接触实现可靠连接,所述壳体、所述皮肤和所述第一等密度点阵之间的界面区域通过第一等密度点阵的过接触实现可靠连接。
19、本发明实施例第二方面提供了一种人形机器人,包括:
20、机器人主体;和
21、上述的人形机器人大腿。
22、本发明实施例第三方面提供了一种上述的人形机器人大腿的制造方法,包括以下步骤:
23、s1、提取人形机器人运动落地、起步、双脚站立这三个步态,并分析这三个步态下人形机器人大腿的边界条件特征及载荷值;
24、s2、为人形机器人大腿设计包含工业设计外观元素的初始模型;
25、s3、在初始模型上设置边界条件特征及载荷值,进行拓扑计算,并分析材料的分布特征;
26、s4、在初始模型上辨识拓扑计算后需要去除材料的区域,并完成该区域材料的消除,形成骨架;
27、s5、对骨架进行抽壳处理,形成骨架壳体,对壳体进行局部增厚;
28、s6、采用第二等密度点阵填充骨架抽壳后的内部空间,壳体和第二等密度点阵之间通过过接触方式复合;
29、s7、对初始模型进行抽壳,形成皮肤;
30、s8、采用第一等密度点阵填充皮肤与骨架壳体之间的空间,第一等密度点阵和壳体之间通过过接触方式复合;
31、s9、将骨架、皮肤及第一等密度点阵在统一的坐标系下进行复合,形成轻量化一体化的人形机器人大腿。
32、本发明的有益效果是,本发明中的大腿采用比普通铝强度更高的材料制造,设计时使用了拓扑设计的方法,因此具备轻质、高强的效果,重量比实体件轻50%,强度经过模拟满足使用要求;本发明的大腿为一体化成型结构,一体化的外观最大程度的保持了工业设计形成的外观轮廓,更加接近人类的审美需求;与传统的机加工结构件+塑料外壳相比,能够减少连接点位,有助于增加大腿部件的使用寿命;本发明有效避免了机器人运动时塑料外观件因为机械连接产生的振动问题,节约了腿部件的装配时间,同时构型设计相对简单,在刚度满足使用要求的前提下有效降低腿部件的总重量。
技术特征:
1.一种人形机器人大腿,其特征在于,所述大腿为一体成型结构,所述大腿各组件通过选择性激光熔化工艺一体成型,所述大腿包括:
2.根据权利要求1所述的人形机器人大腿,其特征在于,所述大腿采用的材料为铝镁钪锆,所述大腿采用的工艺为激光金属3d打印。
3.根据权利要求1所述的人形机器人大腿,其特征在于,所述壳体(11)的上端设置有一电机安装部(111)和第一电机安装卡槽(112),所述第一电机安装卡槽(112)设置在所述第一电机安装部(111)的下方;
4.根据权利要求1所述的人形机器人大腿,其特征在于,所述壳体(11)的厚度为2.1mm-2.5mm;
5.根据权利要求1所述的人形机器人大腿,其特征在于,所述第一加强板(12)的上端连接在第一电机安装卡槽(112)的底部槽面,所述第一加强板(12)的下端连接在壳体(11)的纵向壁面上。
6.根据权利要求1所述的人形机器人大腿,其特征在于,所述第一加强板(12)和所述第二加强板(13)上均设置有漏粉孔(121);
7.根据权利要求1所述的人形机器人大腿,其特征在于,所述第一等密度点阵和所述第二等密度点阵(14)的胞元结构参数相同,其中,所述胞元结构参数包括胞元边长、杆径和倾角;
8.根据权利要求1所述的人形机器人大腿,其特征在于,所述壳体(11)和所述第二等密度点阵(14)之间的界面区域通过第二等密度点阵(14)的过接触实现可靠连接,所述壳体(11)、所述皮肤(2)和所述第一等密度点阵之间的界面区域通过第一等密度点阵的过接触实现可靠连接。
9.一种人形机器人,其特征在于,包括:
10.一种权利要求1-8中任一项所述的人形机器人大腿的制造方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种人形机器人大腿及人形机器人、制造方法,该大腿为一体成型结构,其各组件通过选择性激光熔化工艺整体成型,无机械连接接头;该大腿包括骨架、皮肤以及填充在骨架和皮肤之间的第一等密度点阵,骨架为“局部壳体增厚+第二等密度点阵”的构型,皮肤为等厚度的薄壳体,将骨架和皮肤复合成一体,骨架和皮肤之间添加第一等密度点阵,其中骨架包括壳体、第一加强板、第二加强板以及填充在骨架内部空间的第二等密度点阵。本发明有效避免了机器人运动时塑料外观件因为机械连接产生的振动问题,节约了腿部件的装配时间,同时构型设计相对简单,在刚度满足使用要求的前提下有效降低腿部件的总重量,有助于增加大腿部件的使用寿命。
技术研发人员:聂大明,朱世强,孔令雨,谢安恒,张宇,姜红建,顾建军
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!